Bonjour à tous !
Notre objectif du jour est de récupérer un écocup pendant 2 secondes puis de le relâcher à l'aide d'une ventouse !
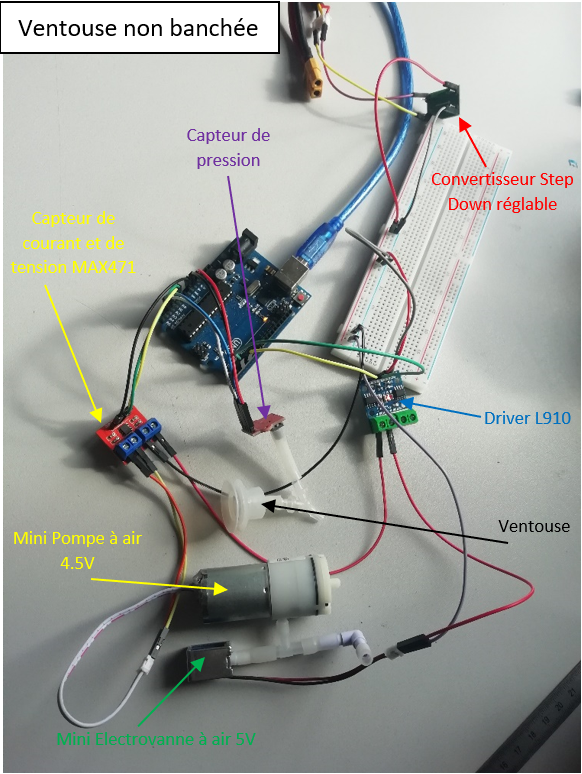
Pour cela, nous allons utiliser :
- Un capteur de courant et de tension MAX771
- Une batterie Lipo 3S (12V)
- Une mini pompe 4.5V
- Un capteur de pression barométrique
- Un électrovanne
- Une Arduino Uno (bien sur !)
- Et enfin un Driver L9110
(le capteur de courant et de tension n'est pas indispensable)
Etape 1 : Adapter son alimentation
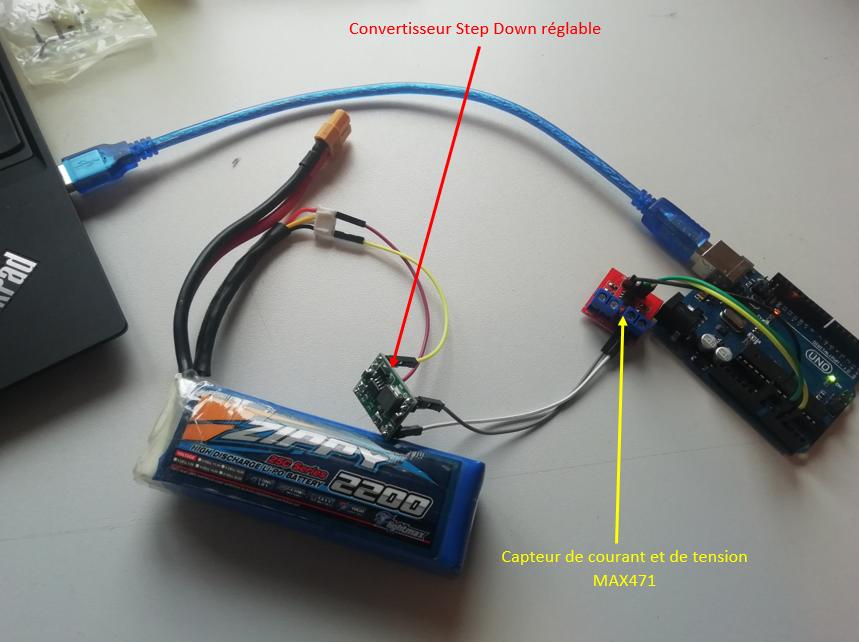
En effet la batterie Lipo 3S alimente mon circuit en 12V. Ma pompe et mon électrovanne fonctionnant en 5V, il est nécessaire d'adapter la tension. Pour cela, je vais utiliser le convertisseur step down réglable ainsi que le capteur de courant et de tension Max471.
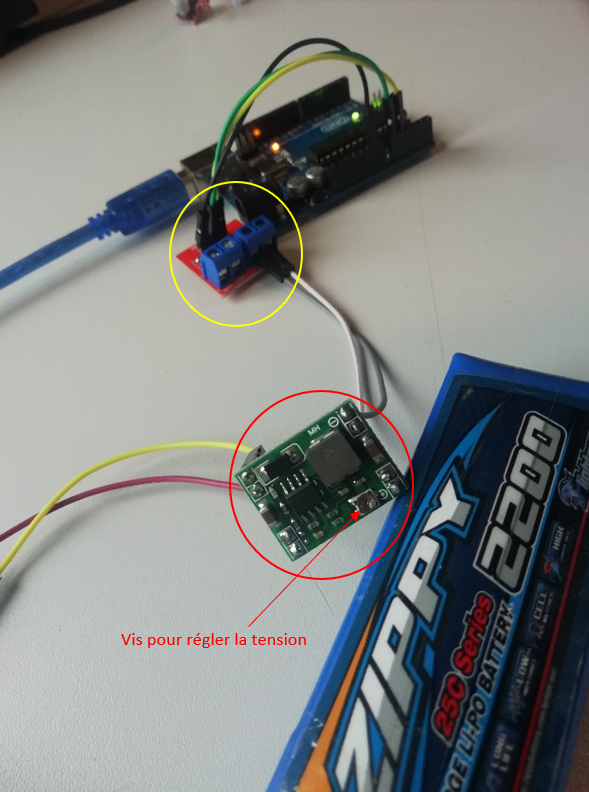
En effet je vais brancher ma batterie sur le convertisseur et régler la tension grâce à la petite vis prévue à cet effet. Grâce au MAX 471 et au code fournit par sa fiche produit, je vais pouvoir suivre l'évolution de la tension jusqu'à atteindre les 5V voulu.
Sur Arduino : 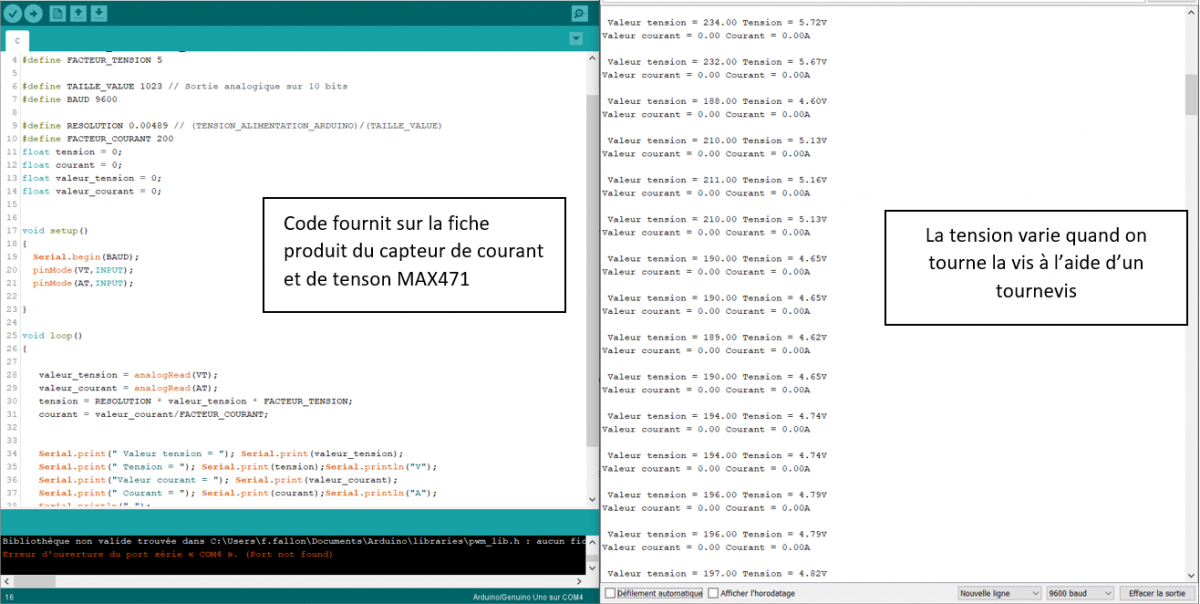
C'est bon : j'ai mon alimentation en 5V !
Etape 2 : Mise en place de l'électrovanne
La question est simple ? Comment contrôler l'alimentation de ma pompe et de mon électrovanne afin d'atteindre notre objectif ? (c.a.d gripper et relâcher l'écocup à ma guise).
Nous pourrions utiliser les pins de l'Arduino en mode OUTPUT ? Et bien non, comme l'indique la fiche produit de l'électrovanne le courant est trop important et risquerai de griller notre Pin ( test malheureusement effectué : ça grille bien.)
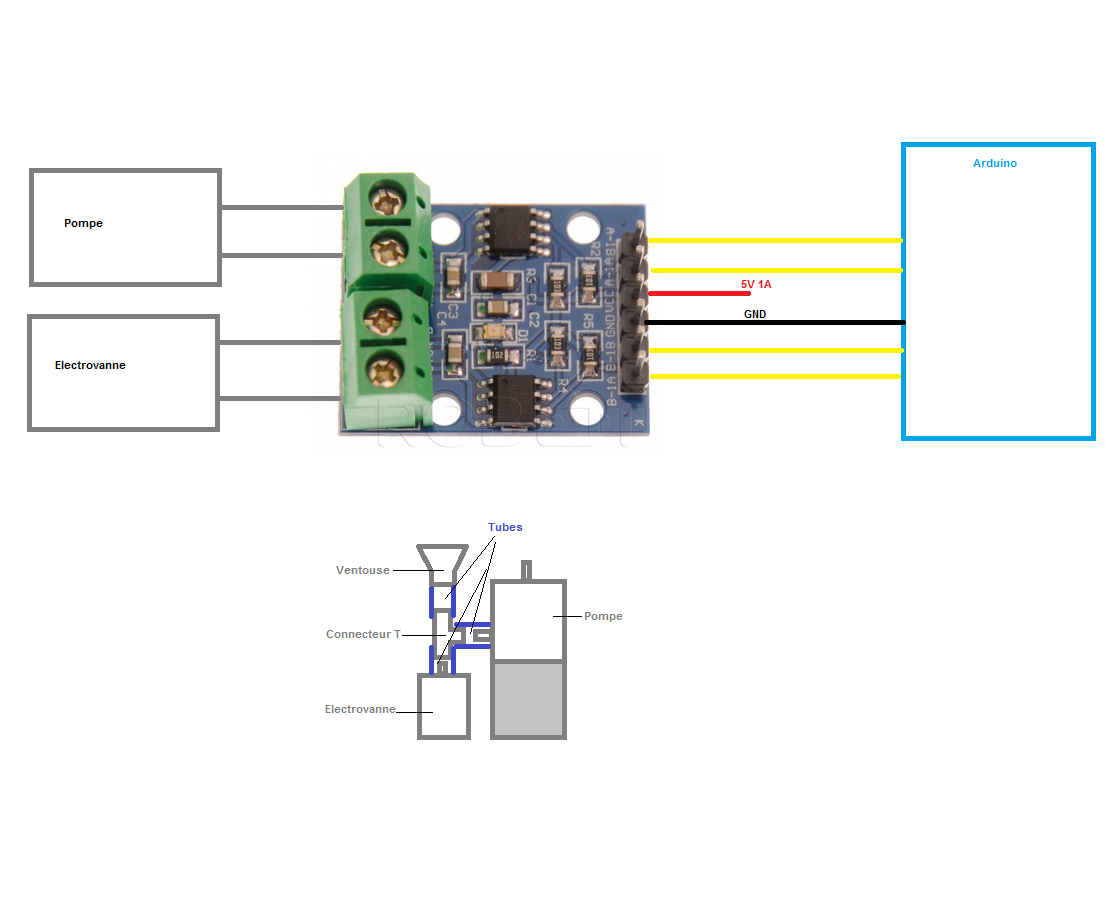
Je vais donc utiliser un Driver L9110 pour moteur CC avec 2 entrées : 1 pour la pompe et 1 pour l'électrovanne !
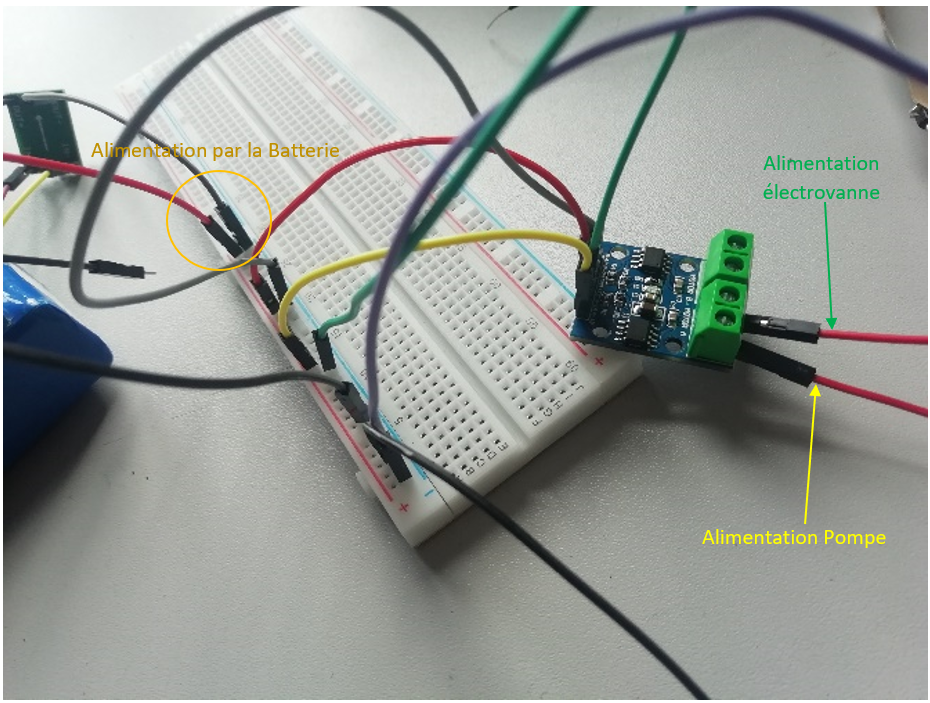
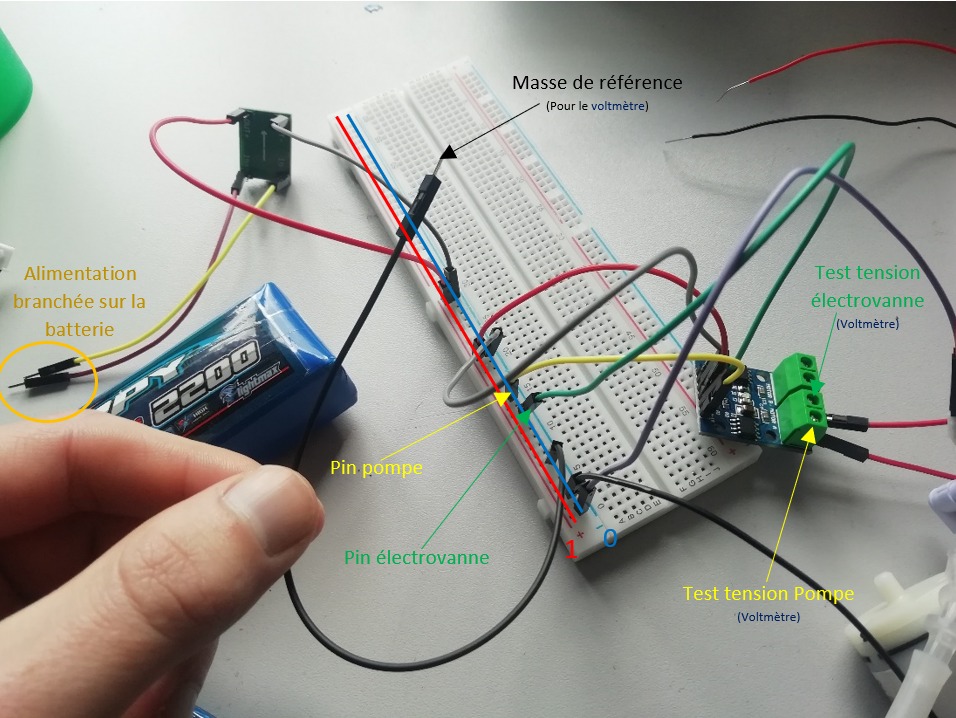
Etude du comportement du driver :
Dans un premier temps, nous avons effectué les tests à la main en testant le comportement du système grâce à un voltmètre en branchant sur la masse, l'alimentation et débranché chacune des entrées du driver.
Voici la table de vérité obtenue suite aux tests ! (X correspond à un fil débranché)
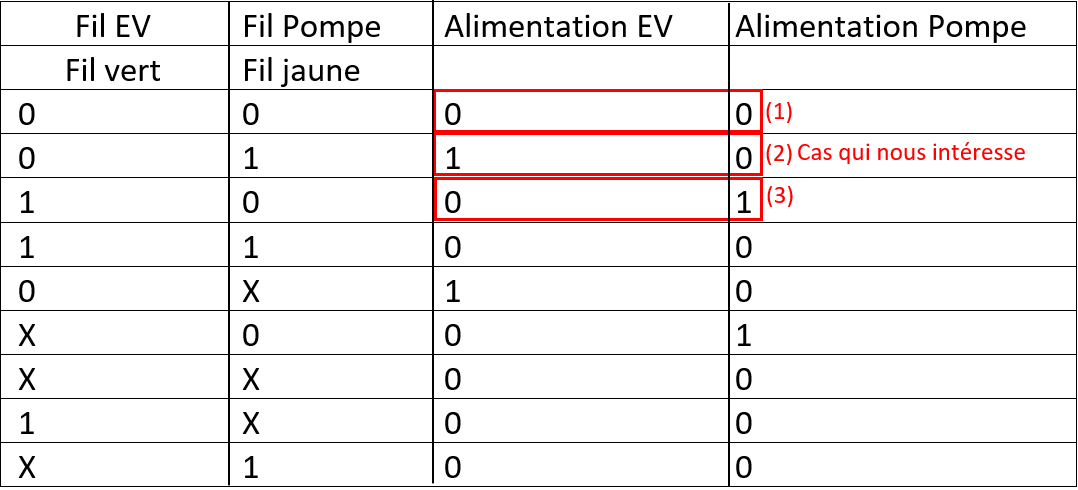
Je sais par exemple que pour aspirer il faut que la pompe soit active, et l'électrovanne no-alimentée (fermée)
De la même manière, pour relâcher l'écocup il faut que la pompe soit éteinte et que mon électrovanne soit alimentée (ouverte)
Nous identifions donc les 3 cas qui nous intéresse : OFF(1), l'aspiration(2), (3) Relâcher
Je sais maintenant la procédure d'alimentation à effectuer dans mon programme !
Etape 3 : Mise en place du programme
Pour élaborer le programme, je vais partir de celui fournit par le capteur de pression (dans la fiche produit)
Etape préalable : je constate que en branchant le capteur de pression, et que la ventouse agrippe l'écocup, les valeurs montes aux alentours de 8000 avec des pics à 16 000. Je vais donc me servir de ces valeurs pour détecter qu'un écocup est attrapé.
Voici le programme final (le capteur de courant et de tension n'est pas utilisé ici) :
Je peux finalement tout brancher en raccord avec mon programme ! (ça marche bientôt !)
Note : Lorsque vous effectuez vos montages, pensez toujours à couper toutes les sources de tension, donc ici la batterie et la carte Arduino)
Voici le câblage final !
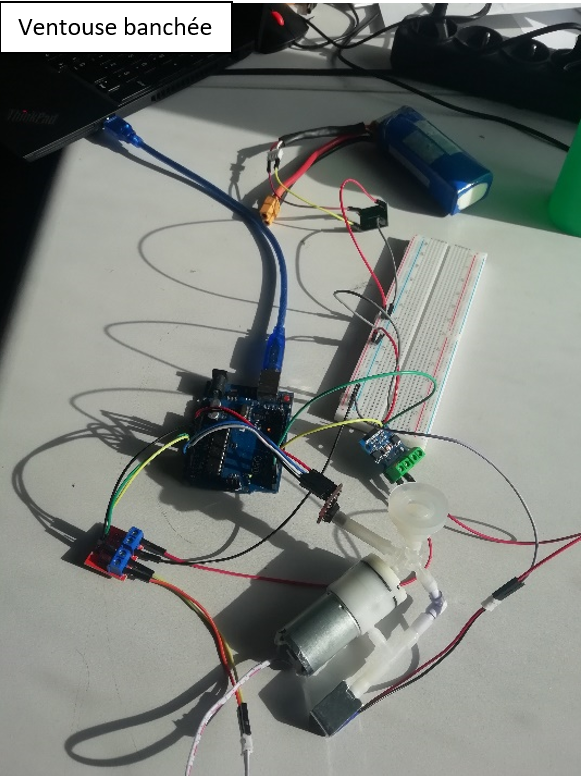
Et voilà !