En panne de sujet actuellement, je me suis penché sur mes derniers projets et j'ai réalisé qu'à chaque fois je refaisais la même chose, ou presque et de façon très empirique. Depuis que je fais des robots roulants (un peu plus d'un an), très souvent je suis amené à installer 2 EV3, des roues mecanum (dont je suis absolument fan). Et à chaque fois je galère avec les problématiques de montage, d'accessibilité des réglages et des alimentations, du passage des cables et de la rigidité de l'ensemble.
J'ai donc décidé de travailler sur une base robotique , sans vraiment de projet spécifique associé. Voici le recto (avec une plaque de plexiglas, ça sert à rien mais je trouve ça beau !) et le verso.
la base fait 30 cm x 30 cm, c'est le carré du plexiglas, à la base j'envisageais de faire un carénage, mais pas sûr...
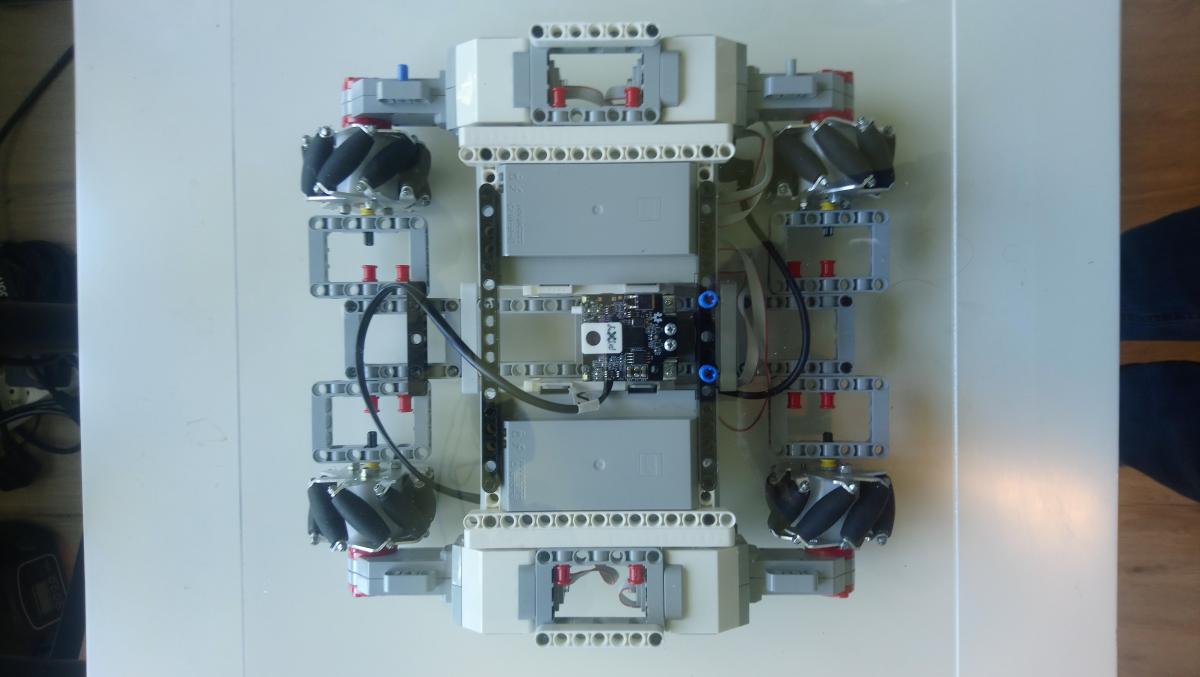
Une des originalités (par rapport à ce que je fais d'habitude !) est que j'ai mis les EV3 à l'envers sous la base robotique pour avoir accès aux boutons de commande facilement et pouvoir construire sur le dessus sans être gêné. Je n'utilise d'ailleurs que très peu les écrans lorsque le robot fonctionne, étant un adepte d'un écran déporté qui communique en bluetooth.
Autre originalité, j'ai mis les roues à l'intérieur pour diminuer l'empâtement et éviter la flexion du châssis.
J'ai beaucoup travaillé sur la rigidité de cette plateforme, quitte à utiliser des pièces "maison" comme on peut voir sur les photos.
J'ai fait en sorte qu'on puisse facilement mettre des détecteur IR ou US sur les 4 faces facilement, et des capteurs dirigés vers le sol. L'installation d'une caméra pixy est aussi simplifiée
Il y a du potentiel sur cette plateforme, 8 capteurs et 4 moteurs en plus des 4 moteurs des roues mecanum... Il ne me reste plus qu'à imaginer un nouveau projet...
Et contrairement à ce qu'on pourrait croire c'est bien le dessus de la plateforme sur la photo !