Bonjour,
je ne m'y connais pas énormément en robotique molle, mais j'ai au moins eut un "petit" TP de 3 après midis sur le sujet, où on avait fabriqué un "robot" souple (enfin, un truc qui se déplace sans aucune intelligence, sans pouvoir tourner, ... bref, le stricte minimum).
Un des principes de bases que j'ai retenu, c'est qu'un robot souple, tu as un état "actif", et un état passif : ça veut dire que tu as une position que tu peux commander, mais l'autre, c'est juste l'élasticité de tes matériaux qui t'y ramène. Il faut donc se débrouiller non seulement pour avoir un système qui permette d'atteindre l'état actif, mais il faut aussi un système (passif) qui te ramène à l'état passif
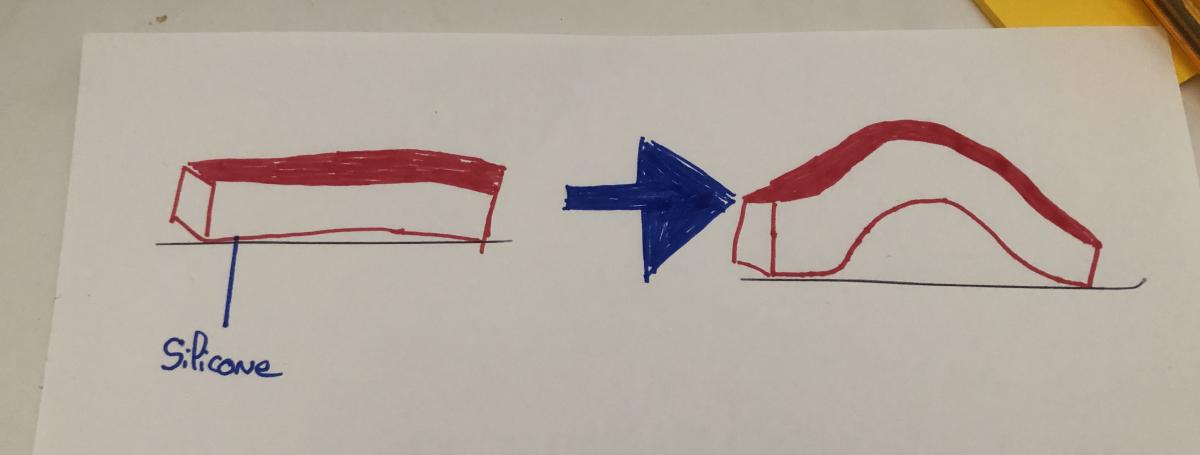
Dans notre cas, on avait utilisé une membrane en polymère, qu'on étirait avant de la placer sur un cadre en plastique souple (type transparent pour rétro-projecteur). En appliquant une forte tension (on montait jusqu'à 4000V DC) entre les deux cotés de la membrane (couvertes de graisse conductive) , on créait une force qui comprimait la membrane (les charges positives d'un cotés et négatives de l'autre s'attirent mutuellement. Par conséquent l'épaisseur de la membrane diminuait, ce qui entraîne une augmentation de sa surface (conservation du volume), et relâchait donc de la tension sur le cadre, qui redevenait plus plat.
 1hz_3000V.wmv 39,6 Mo
307 téléchargement(s)
1hz_3000V.wmv 39,6 Mo
307 téléchargement(s)
Je dirais que globalement,, tu as deux types de robots "souples":
- un embout souple, monté sur un actionneur rigide (par exemple tu fixes une queue en silicone sur un servo moteur pour faire nager un "poisson")
- un actionneur souple : ça peut être un volume que tu gonfles d'air, un matériel qui se dilate en fonction de la température, ... Dans ce cas, tu as d'un coté le problème du fait que tu as l'état passif, mais aussi celui que l'énergie doit venir de quelque part, et que cette source d'énergie n'est généralement pas disponible dans des matériaux souples, mais dans des composants rigides (compresseur, générateur de tension, ...), qui en plus sont souvent lourds. Sans compter que la plupart des techniques de robotique souple sont encore très peu efficaces en termes de rendement. C'est pour ça que beaucoup des robots que tu verra ont une source d'énergie "externe".
Aidez-nous à vous aider : partagez toutes les informations pertinentes : description précise du problème, contexte, schéma de câblage, liens vers la documentation des composants, votre code (ou encore mieux un code minimal reproduisant le bug), ...
Vous recevrez ainsi plus de réponses, et elles seront plus pertinentes.