Oui, bravo et merci pour ce partage passionnant.
Ca donne des idées. Je vais faire un peu l'équivalent mais avec le tinymovr avec une architecture série cette fois.

Modification d'un (micro) servo pour robot à pattes
Débuté par pat92fr, sept. 18 2020 11:32
194 réponses à ce sujet
#161
 servo pour robot à pattes : message #161")
Thot
-

- Membres
-

- 327 messages
Habitué
- Gender:Male
- Location:Toulouse
-
Interests:Artiste Roboticien, prendre les dernières techno et les mettre sur scène... telle est ma devise.
Gestuelle et conscience artificielle.
Bipédie et quadrupédie
Posté 01 janvier 2021 - 03:07
- pat92fr aime ceci
"Il n'y a rien de plus étrange pour l'homme que son image" RUR, Karel Capek
Caliban Midi - Art - Terroir et Robotique
#162
pat92fr
-
- Membres
-
- 844 messages
Membre passionné
- Gender:Male


#163
Oracid
-

- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 02 janvier 2021 - 02:10
L'archecture semi-parallèle de cette jambe entraine une consommation excessive pour si peu de masse supportée. Je crois que je vais changer pour une patte en 4-bar.
A mon avis, cela dépend de ton objectif.
Veux-tu faire un quadrupède proche du réel ou quelque chose qui s'en éloignerait, mais peut-être plus simple et plus efficace.
Ceci dit, les plus beaux quadrupèdes sont très proches du réel, mais avec des moteurs gros consommateur de courant.
Pourquoi dis-tu que ta patte est semi-parallèle. Si les 2 servos sont sur le chassis, elle est bien, parallèle, mais avec une extension.
Ce type de mécanisme, très courant, est peut être un bon compromis.
La différence avec les Chetah, c'est qu'ils utilisent une courroie au lieu d'une tringle, mais le principe reste le même.
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#164
Thot
-
- Membres
-
- 327 messages
Habitué
- Gender:Male
- Location:Toulouse
-
Interests:Artiste Roboticien, prendre les dernières techno et les mettre sur scène... telle est ma devise.
Gestuelle et conscience artificielle.
Bipédie et quadrupédie
Posté 09 janvier 2021 - 10:46
As-tu essayé de placer un petit élastique entre le centre de l'articulation de la cuisse et le centre de la biellette à l'arrière du genou ? Facile à tester.
Certes, cet élastique force sur le moteur quand la patte est en l'air mais une petite tension qui compense au mieux le poids quand la patte est au sol permet d'avoir un robot debout sans allumer les moteurs. Sur le robot bipède sur lequel je travaille, l'élastique est vital et a pour rôle de diminuer grandement la consommation et la température des moteurs. On le voit aussi, de manière détournée sur le bipède de @oracid
Le réglage de l'élastique n'a pas forcément besoin d'être précis mais il aide grossièrement le moteur qui, lui, est précis.
L’élastique reste pour moi la meilleure solution par rapport au ressort qui est souvent trop puissant et difficile à intégrer. L’élastique, en plus, en cas le patte complètement pliée, diminue sa tension et stabilise la position assise.
- pat92fr aime ceci
"Il n'y a rien de plus étrange pour l'homme que son image" RUR, Karel Capek
Caliban Midi - Art - Terroir et Robotique
#165
pat92fr
-
- Membres
-
- 844 messages
Membre passionné
- Gender:Male
Posté 09 janvier 2021 - 01:46
Hello,
Désolé pour la réponse tardive, je mettais en ligne sur hackaday cette réalisation (https://hackaday.io/...o-servo-sms-mod). Ca prend du temps cette activité !
Pourquoi dis-tu que ta patte est semi-parallèle. Si les 2 servos sont sur le chassis, elle est bien, parallèle, mais avec une extension.
Ce type de mécanisme, très courant, est peut être un bon compromis.
La différence avec les Chetah, c'est qu'ils utilisent une courroie au lieu d'une tringle, mais le principe reste le même.
C'est vrai. J'ai aussi remarqué qu'au repos, le servo de la hanche pousse vers le bas. Celui de genou vers le haut. Je soupçonne qu'une partie de l'énergie consommée par les deux servos soit perdue, à cause de ce mécanisme antagoniste. Bien que moins réaliste, un mécanisme parallèle à 4 ou 5 barres semble plus efficace. Je souhaiterais terminer mon fil sur le micro servo en faisant un petit quadrupède équipé de servos hackés. J'hésite encore sur le type de mécanisme à fabriquer.
As-tu essayé de placer un petit élastique entre le centre de l'articulation de la cuisse et le centre de la biellette à l'arrière du genou ? Facile à tester.
Certes, cet élastique force sur le moteur quand la patte est en l'air mais une petite tension qui compense au mieux le poids quand la patte est au sol permet d'avoir un robot debout sans allumer les moteurs. Sur le robot bipède sur lequel je travaille, l'élastique est vital et a pour rôle de diminuer grandement la consommation et la température des moteurs. On le voit aussi, de manière détournée sur le bipède de @oracid
Le réglage de l'élastique n'a pas forcément besoin d'être précis mais il aide grossièrement le moteur qui, lui, est précis.
L’élastique reste pour moi la meilleure solution par rapport au ressort qui est souvent trop puissant et difficile à intégrer. L’élastique, en plus, en cas le patte complètement pliée, diminue sa tension et stabilise la position assise.
En effet, c'est difficile de trouver le bon ressort. L'élastique est une valeur sure ! Au repos, le ressort aide les moteurs, en effet. En marche, ma crainte est que cela rende encore plus difficile l'exécution d'une démarche rapide. L'élastique va s'opposer au repliement de la jambe pendant la phase de swing, qui est la plus critique en vitesse de rotation des servos. Faut tester !
En outre, l'élastique ou le ressort pourrait également servir à fabriquer des tendons de manière à ce que l'énergie appliquée à la patte ne vienne pas seulement des servos en phase de stance. Le but serait de gagner en vitesse en restituant de l'énergie en fin de stance. Mais la mise au point d'un mécanique intégrant ressorts/élastiques à la fois pour supporter le poids du robot et pour stocker/restituer l'énergie pendant la marche me semble compliquée. Le risque est d'augmenter le poids de la jambe avec tous les inconvénients qui en découlent.
Au sujet de la consommation excessive, je pense avoir trouver un coupable. Au fil des essais, j'ai constaté que la réactivité apportée par l'intégrale du PID position est très lente. Elle n'a aucun effet sur la tenue de la consigne de position sur des mouvements rapides. Un bon réglage de Kp et Kd permet de tenir la consigne de position, de limiter les oscillations et de doser la "compliance". Le Ki a un effet beaucoup plus lent. Par exemple, lorsque la patte est en statique et chargée (300gr), le courant dans les moteurs grimpent progressivement pour arriver, soit à la limite programmée (ex. : 500mA), soit à une valeur qui permet à la patte de bouger pour atteindre la consigne de position. Dans les deux cas, c'est trop long et dangereux. J'ai testé des valeurs élevée de Ki et ca s'est mal passé avec mon implémentation de PID (clamp). Il faudrait peut etre remettre à zéro l'intégrale, lorsque l'erreur change de signe. Ce sera peut etre une amélioration future. Alors, je finis par ne plus mettre de Ki, ou alors une valeur symbolique dont l'effet est négligeable. Ca marche correctement.
A suivre !
- Oracid aime ceci
#166
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 09 janvier 2021 - 02:12
J'hésite encore sur le type de mécanisme à fabriquer.
Le 5 barres a moins de pièces, ce qui n'est pas intuitif. En effet, les palonniers font office de fémur.
Alors que sur le 4 barres, il faut une transmission entre les palonniers et le fémur.
Attention, cela ne vaut que pour mon type 4 barres. On peut parfaitement imaginer un 4 barres où les palonnier feraient office de fémur, mais alors, il faudrait aligner l'axe des servos et les mettre dos à dos.
C'est parfaitement faisable avec une imprimante 3D, mais compliqué à mettre en œuvre en Lego, mais pas infaisable. D'ailleurs, je l'ai déjà fait et j'y pense encore.
Tu ne parles pas de tes vidéos ?
- pat92fr aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#167
pat92fr
-
- Membres
-
- 844 messages
Membre passionné
- Gender:Male
Posté 09 janvier 2021 - 09:15
Exact. D'ailleurs, pour le mécanisme de la patte, je pense fortement aussi à faire un mécanisme 4 bar avec les servos montés face à face et les palonniers solidaires des fémurs. C'est le plus simple pour la patte, mais ca complique le châssis. Pour le châssis, je pensais faire comme un pupper, avec deux plaques carbones fines (1mm à 1.5mm) et des entretoises imprimées en 3D servant de support aux servo notamment. Cela nécessite une découpe assez profonde pour laisser passer les fémurs. La CAO estime à 450g, la masse du robot avec le module M5. C'est sans compter l'accus, la visserie, les roulements, et mes cartes de control maison avec les raccordements.
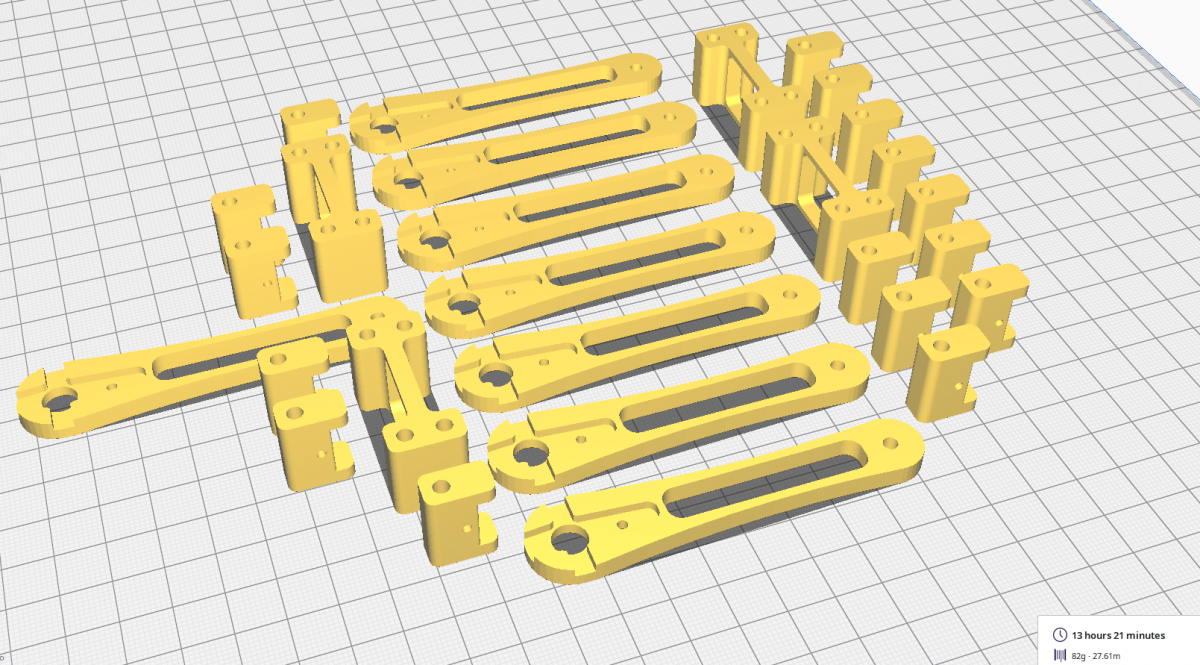
Quelques ébauches et une première impression.
- Fémur = 60mm
- Tibia = 90mm
- Voie = 110mm
- Empattement = 200mm.
- Découpe plaques = 250x170mm.
Je me demande s'il y a des ratios 'magiques' pour la conception des quadrupèdes !
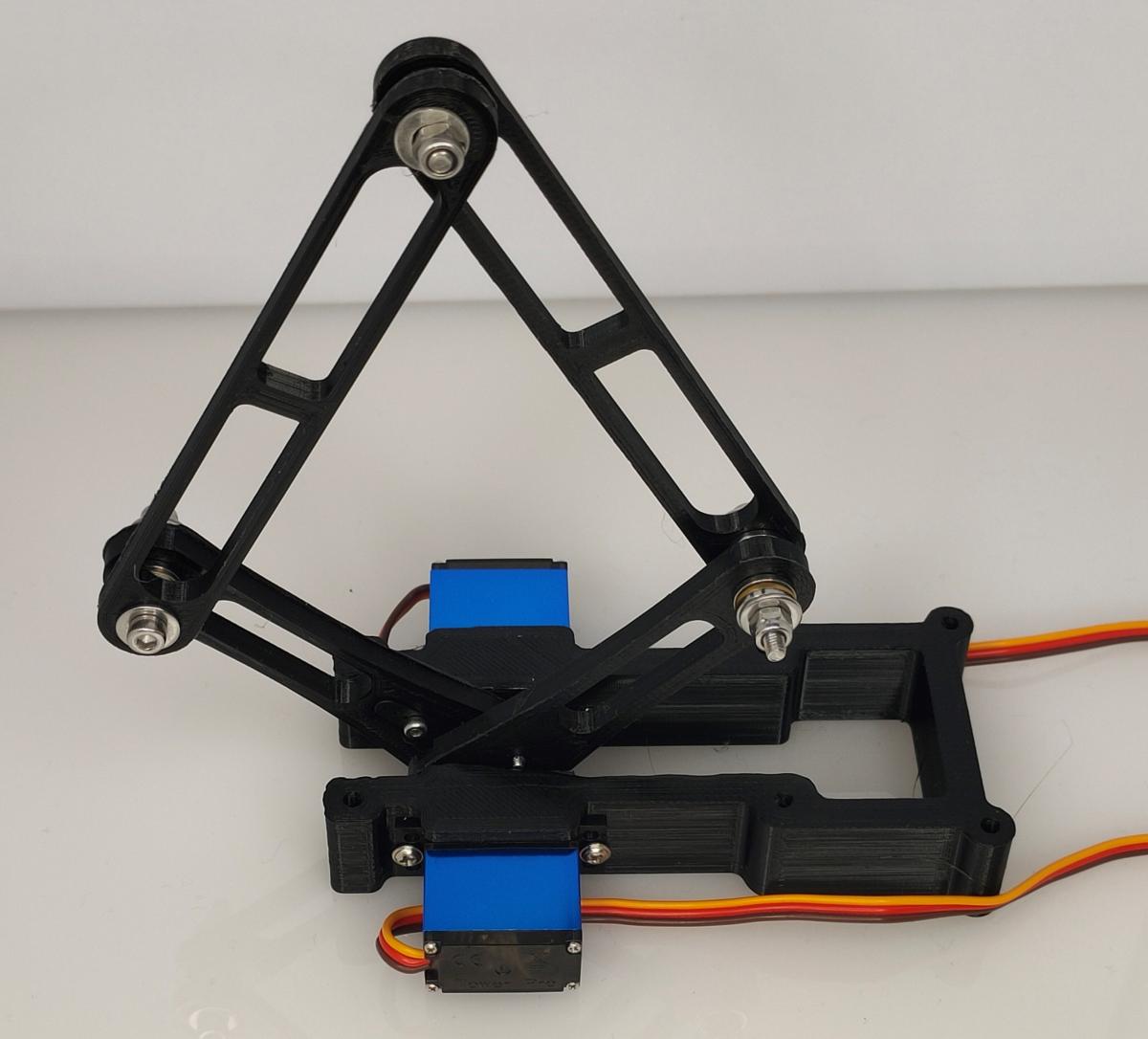
Alors, l'idée de la fourche en PLA, c'est pas terrible en fait ! Je vous laisse imaginer l'ordre de montage des palonniers ! Je cherche encore... la fatigue, certainement !
Patrick.
#168
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 10 janvier 2021 - 09:04
Je me demande s'il y a des ratios 'magiques' pour la conception des quadrupèdes !
Bonne question !
Ton châssis est intéressant.
La fenêtre où sont installés les servos ressemble à un U. A mon avis, tu gagnerais à faire une fenêtre fermée en forme de B.
Ainsi chaque axe de servo pourrait reposer sur un roulement indépendamment de l'autre servo.
Parce ce que là, évidemment, la jonction des 2 axes qui se font face, va poser problème.
Les mesures de FourBar500:
- fémur=88mm
- tibia=120mm
- entre axe servos, largeur=24cm
- entre axe servo longueur=25,5cm
- servos, 8 MG92B
Pourquoi ne pas prévoir une interface entre l'essieu avant et l'essieu arrière. Ainsi, si tu veux modifier la longueur, tu n'auras qu'à modifier cet interface. De même pour les essieux.
C'est ce que je fais pour mes quadrupèdes. Tout est identique, sauf les interfaces.
Bravo pour ta vidéo !
- pat92fr aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#169
Mike118
-

- Administrateur
-
- 10â¯339 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 10 janvier 2021 - 12:40
Alors, l'idée de la fourche en PLA, c'est pas terrible en fait ! Je vous laisse imaginer l'ordre de montage des palonniers ! Je cherche encore... la fatigue, certainement !
Patrick.
Tu peux couper ton U en 2 morceaux.
Cela permettrait de pouvoir monter les palonniers ...
Ton " U " reprendrait sa forme initiale une fois fixé sur les plaques...
- pat92fr aime ceci
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#170
pat92fr
-
- Membres
-
- 844 messages
Membre passionné
- Gender:Male
Posté 13 janvier 2021 - 12:38
Bonsoir !
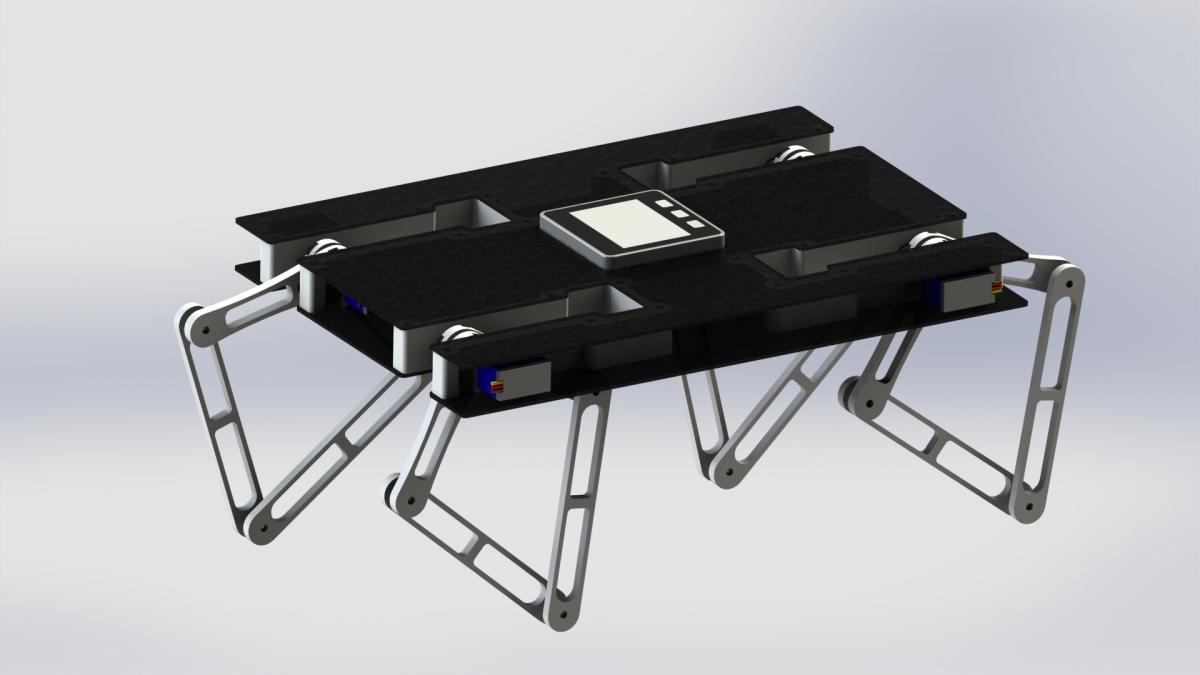
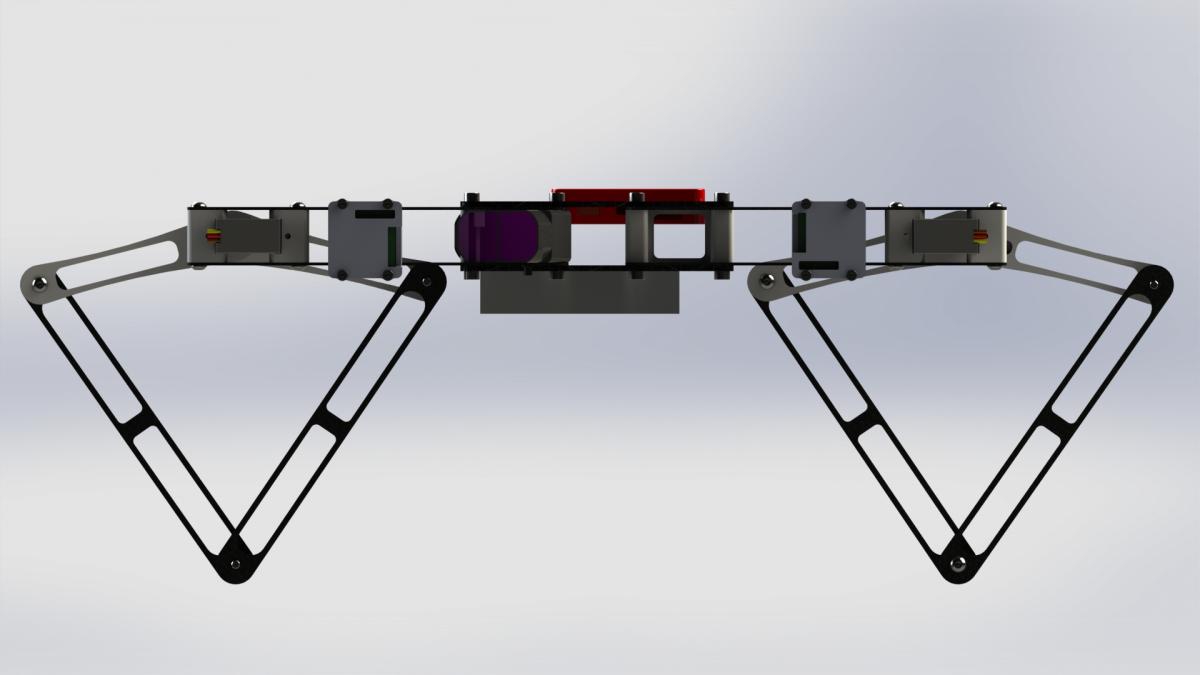
Merci beaucoup à tous pour vos conseils ! Alors, je viens de réviser la conception mécanique du robot, en essayant d'en tenir compte, et j'obtiens ce nouveau design.
Oracid : j'ai repris tes dimensions, à l'exception de la voie (130mm). C'est peut etre un peu plus étroit que ton "FourBarQuad500", si on prend la mesure au centre des pieds. J'ai retenu l'idée de l'architecture modulaire et cela se combine avec l'idée du U démontable de Mike pour le montage des servos et des palonniers (indispensable !). Par contre, je sèche sur la fourche en 'B' ! J'ai bien compris le principe (j'avais cette idée en tête aussi) mais je n'arrive pas à l'adapter à la façon de monter les palonniers sur mes fémurs. Ca demande encore un peu de réflexion...
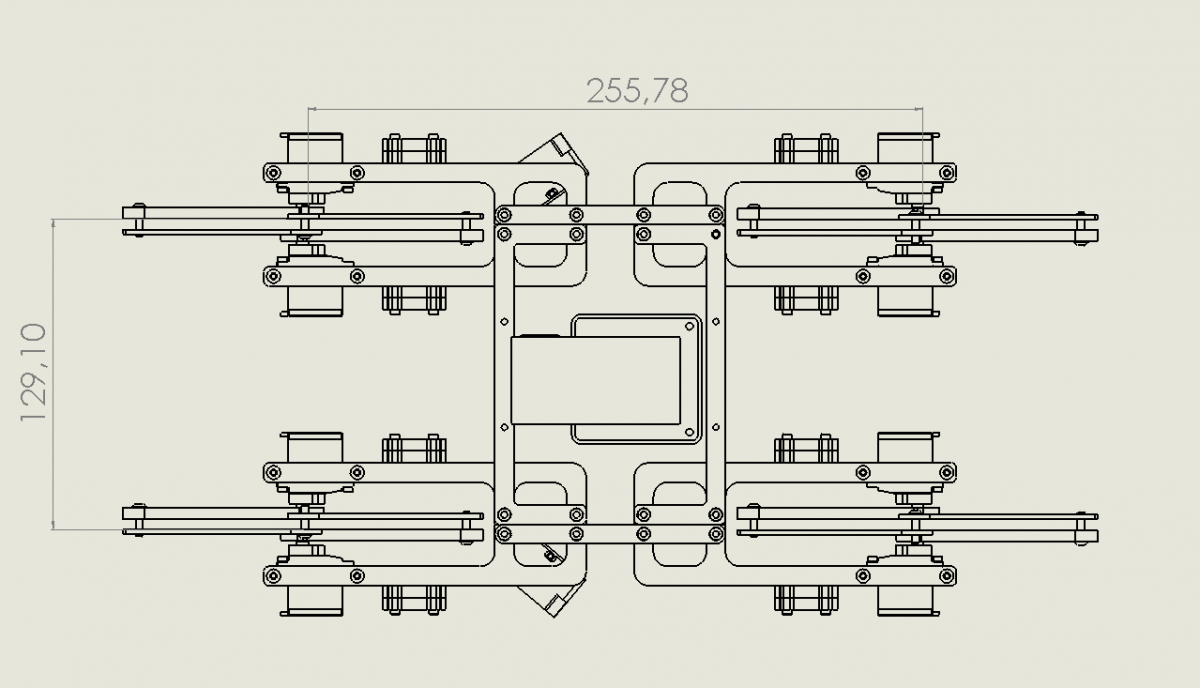
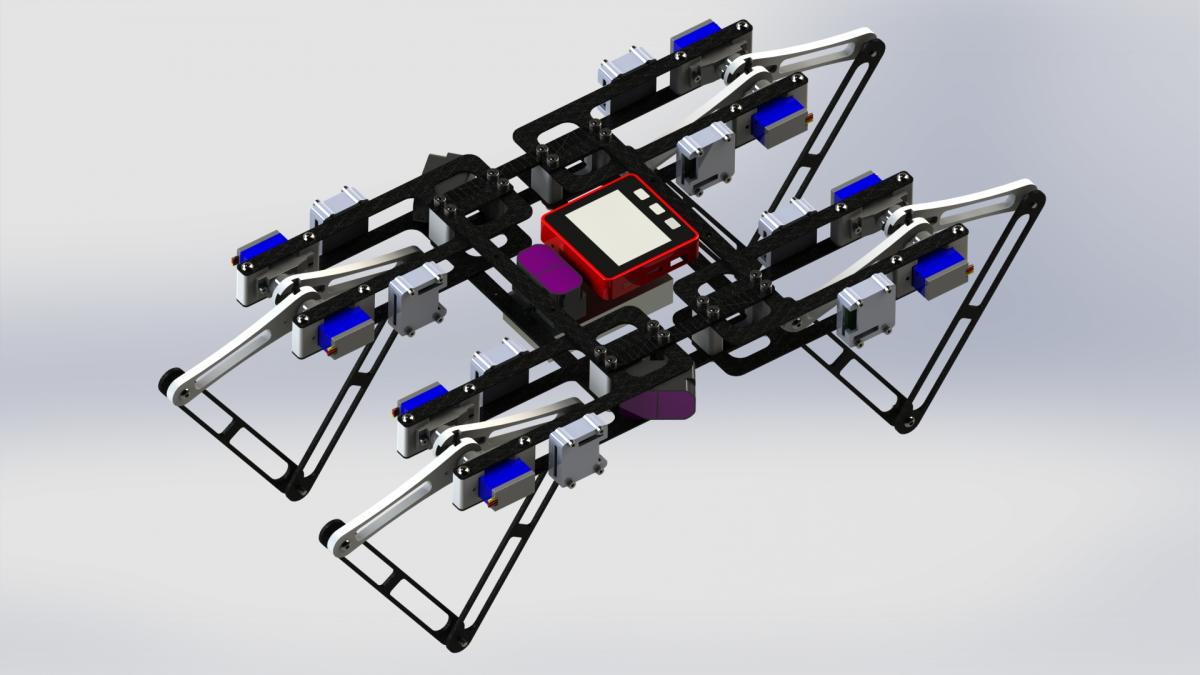
La vue d'ensemble, avec des MG92b (x8), ma petite carte de contrôle (x8) à proximité des servos, le M5Stack, les LIDAR (45° gauche, 45° droite, vertical) et un LIPO 2S 850mA.h dessous :
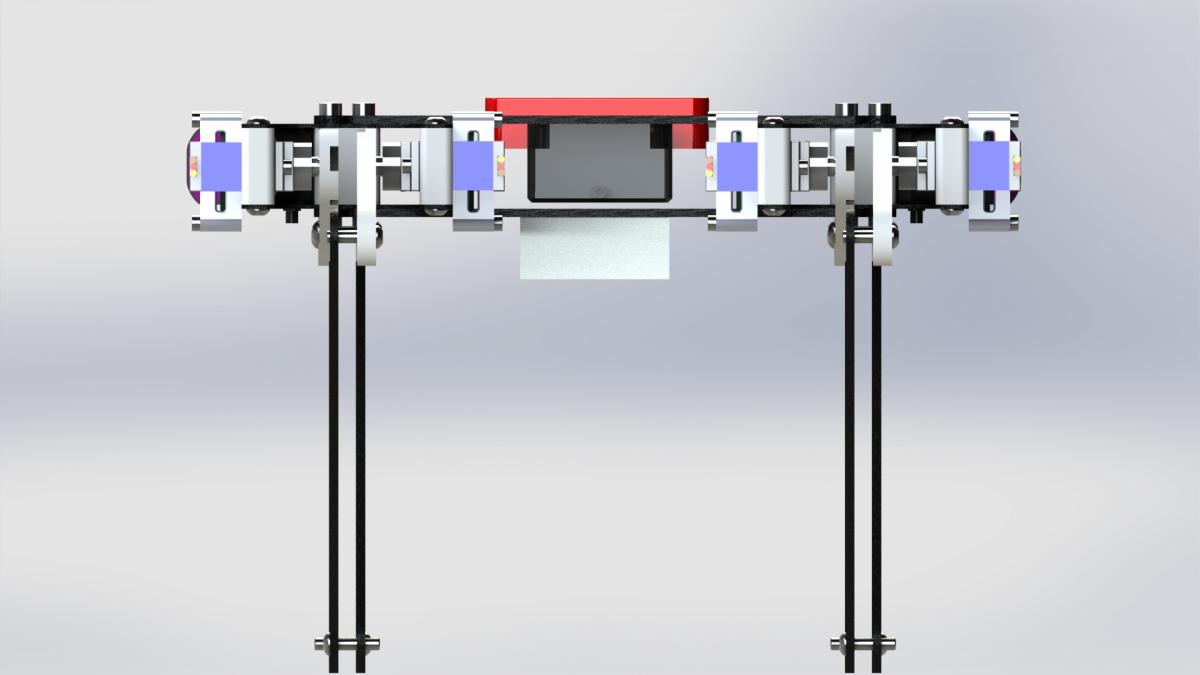
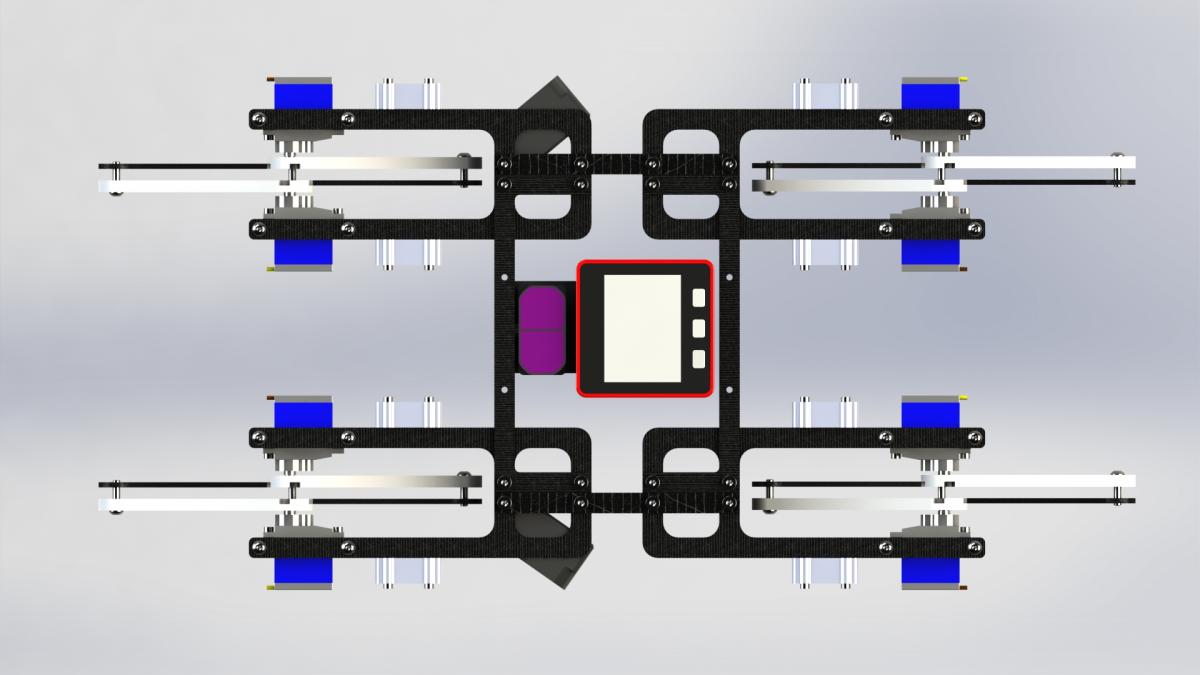

Non modélisé : le TTLinker, un ou deux hubs compatible dynamixel, et le harnais de raccordement (servo, lidar, alimentation), et les butées à billes des jambes (x16).
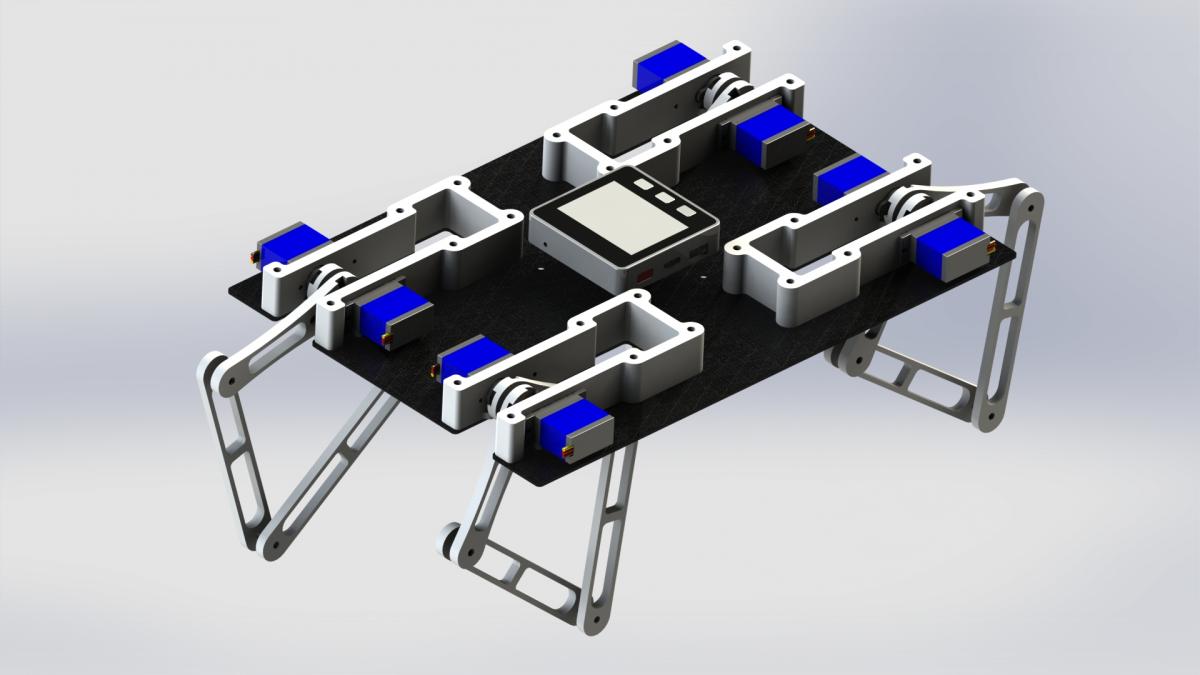
Le robot est construit sur la base d'un module mécanique (fourche équipée), répété 4 fois à l'identique :
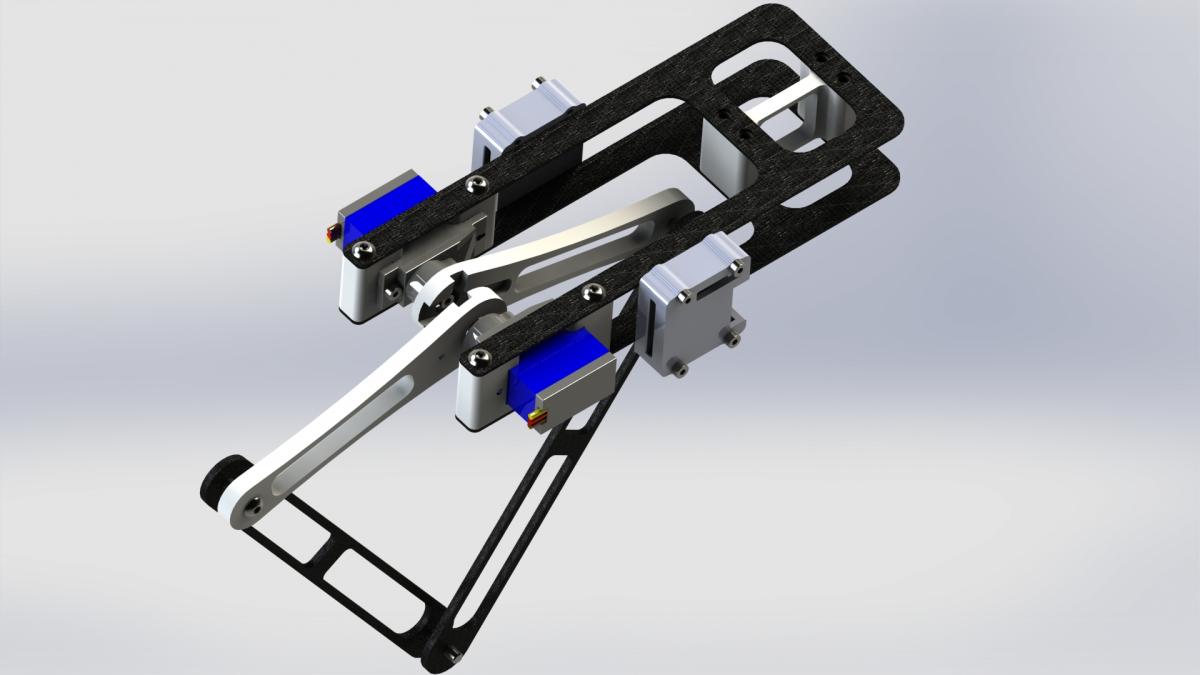
Lui même basé sur un sous module avec un servo, une carte de contrôle, un support plastique/carbone et une demi-patte (1 fémur, 1 tibia) (non représentée), répété deux fois à l'identique :
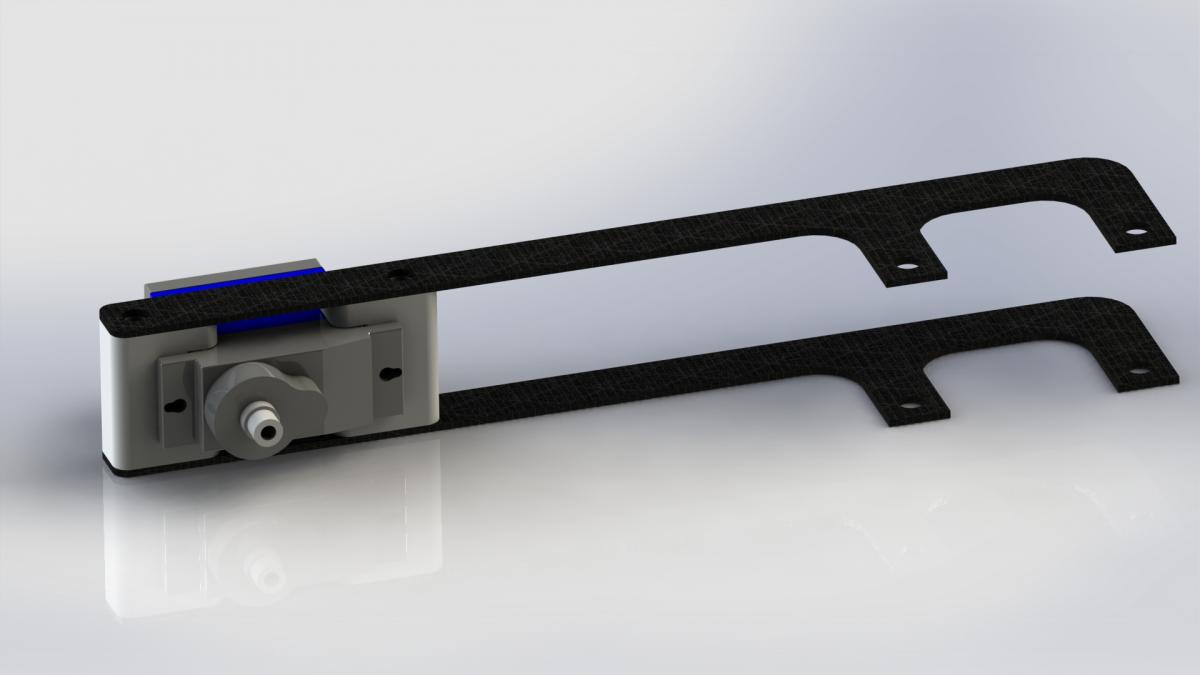
Cela permet de n'avoir que 3 types de pièces plastiques différentes pour l'ensemble du robot, et un seul type de pièces carbones (x16) pour construire les 4 pattes. Il reste quelques pièces en carbone, en forme de longeron, pour interconnecter les quatre modules "fourche/patte" entre eux. Cela permet de jouer sur la voie et l'empattement sans avoir à refaire toute la mécanique (et ca minimise la perte de pièces en carbone en cas de redesign partiel).
Voila ! Ca prend forme !
Reste le sujet difficile, qui est l'optimisation de la masse. Etant habituellement plus enclin à dessiner des robots pour la panzer division, je pars de loin pour faire léger !
Pour minimiser la masse du robot, j'ai cherché à réduire le volume des pièces en plastique, et la surface des pièces composites. Ca ressemble à de la dentelle !
Cela risque d'être un peu souple (à voir en vrai), mais la souplesse semble plutôt bien réussir à certains robots de la famille des "FourBarQuad" (  ), alors ce n'est peut etre pas un souci finalement.
), alors ce n'est peut etre pas un souci finalement.
Actuellement, le robot pèse 450g (estimation CAO) avec le modèle présenté. Il manque la masse des cordons et des connecteurs. Les trois LIDAR font 36gr et le M5 fait 65gr. La batterie, qui pèse 50gr, est également comptée. Le modèle comprend la visserie ISO M3/M2 en métal (inox) et compte tenu du nombre de vis, ca doit jouer un peu. Mais je n'ai pas trouvé les butées à billes. Je me demande si c'est bien utile compte-tenu du poids du robot et du couple des servos. Autant sur un robot pupper, ca parait indispensable, mais pour un robot plus léger comme celui-ci, c'est vraiment du luxe.
On peut gagner 1/4 de la masse totale, passer en dessous des 400gr, pour viser les 350gr, en supprimant tous les LIDAR, en réduisant la taille de la batterie et en remplaçant le M5Stack par un M5StickC+.
Même si ce n'est pas l'objectif du robot, il faudra alors faire de l'odométrie aidée du gyro pour parcourir les 10m en ligne droite et s'arrêter après l'arche dans le cadre d'une éventuelle participation à la prochaine TRR.
Bien, n'hésitez pas à faire des remarques ou des suggestions. Je referai bien deux ou trois fois le design complet avant de lancer l'usinage et l'impression. Le carbone arrive de Chine... alors le délai de réflexion est incontournable !
--
Pour finir, j'ai mis à jour le tout premier post de ce fil. https://www.robot-ma...attes/?p=111137
J'ai passé un peu de temps à faire quelques vidéos, qui montrent la mise en œuvre de la petite carte d'asservissement avec du code Arduino mis en ligne.
A moins que la carte elle-même (hw et/ou sw) suscite plus d'intérêt, je pense me focaliser sur la réalisation du quadrupède qui utilise cette carte.
--
Par ailleurs, j'ai commencé à développer une carte de contrôle pour servo brushless. Ma première maquette commence à fonctionner. Le moteur tourne avec un algo de type FOC, mais c'est très préliminaire. Je pars de 0 en terme de connaissances et de programmation de ce type de contrôleur. En 2021, je compte faire ma propre carte de contrôle brushless, pour le coté exploratoire. La cible finale serait de réaliser un robot à pattes de petite/moyenne taille, c'est à dire pas plus de 50 à 100W en régime établi par servomoteur (des moteurs de 100gr grosso modo couplés à un réducteur). Je suis pas anglais... Il faut bien reconnaitre que fabriquer un quadrupède, avec des profilés alu de 30x30 et 50kg de fil ABS, et des moteurs de 2kW par articulation, ca donne un truc pas très agile pour la course des 10m, et il faut une tranche de centrale nucléaire au bout d'un cordon pour faire fonctionner le tout .. et ce n'est pas autorisé pour la TRR (d'ailleurs la session de janvier a l'air compromise !
A suivre !
Patrick.
#171
Thot
-
- Membres
-
- 327 messages
Habitué
- Gender:Male
- Location:Toulouse
-
Interests:Artiste Roboticien, prendre les dernières techno et les mettre sur scène... telle est ma devise.
Gestuelle et conscience artificielle.
Bipédie et quadrupédie
Posté 13 janvier 2021 - 08:12
Eh beh... Ca avance ! 
Pour la TRR, oui, la session de janvier va être compliquée, les lieux pour accueillir du public avec une grosse surface, en ce moment...
J'avais une question au sujet du carbone (je m'entraine à utiliser les tubes de carbone). Tu prends des plaques de carbone ? (si tu as un lien, je suis preneur) Si oui, je suis curieux de savoir comment tu les découpes, je sais que c'est galère et les poussières de carbone sont toxiques. Tu as accès à une découpe à jet d'eau ?
Ravi d'apprendre que tu vas tenter le contrôle brushless à l'avenir ! On continue à tester de notre côté, pareil en mode light et pas "centrale nucléaire". Après, les robots "nucléaires" tels que les MIT Cheetah, en théorie, en trois quatre bonds, ils ont fait les 10m. Je vais essayer d'en faire venir un à la TRR
Pour la souplesse, j'ai aussi l'impression que c'est important. Je ne sais pas si tu as un animal quadrupède dans ton entourage, mais c'est inspirant et on voit clairement la colonne vertébrale qui joue beaucoup.
- pat92fr aime ceci
"Il n'y a rien de plus étrange pour l'homme que son image" RUR, Karel Capek
Caliban Midi - Art - Terroir et Robotique
#172
pat92fr
-
- Membres
-
- 844 messages
Membre passionné
- Gender:Male
Posté 13 janvier 2021 - 08:57
Bonjour,
Pour un besoin rapide en petite dimension, je vais chez FlashRC et je prends des plaques de 150x350 Ecotech. Le service de colisage de cette boutique est très rapide et fiable. En livraison Chronopost, ca peut arriver en 24h. La qualité des plaque est excellente. En revanche, les dimensions sont limitées. Leurs tubes carbones tressés sont bons pour faire de la structure. Les tubes carrés sont pas mal non plus.
Pour de plus grandes dimensions, c'est en Chine que c'est le moins cher, mais la qualité est assez aléatoire d'une boutique à l'autre. Je soupçonne même d'avoir reçu des plaques dans un matériau composite douteux, avec une finition de surface imitation carbone. Pour fabriquer des pièces de robot, ca passe néanmoins. Pour fabriquer un exemplaire du robot pupper, j'ai acheté des plaques 200x400 en épaisseur 1.5, 2 et 3mm, dans la boutique GlobalMart Store et c'était de qualité correcte. Leur service de colisage est rapide. Le délai de livraison est de deux semaines.
https://fr.aliexpres....8bd36c12POjnp9
Il faut une aspiration pour ne pas respirer la poussière de carbone produite par l'usinage ou le ponçage. Tu ponces à la main en extérieur ou avec un masque (on n'en manque pas). Je découpe à la CNC et j'utilise une fraise coupe diamant de 1 à 3.17mm.
Si tu parviens à faire venir un de ces robots quadrupèdes évolués, ce serait intéressant ! Je prendrai ma caisse à outils pour voir comment c'est fait dedans ! :-)
Je réfléchis toujours à mes tendons élastiques, mais il faut déjà un truc qui marche en rigide.
Patrick.
#173
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 13 janvier 2021 - 09:17
Pour la TRR, pas besoin de détection de portique à l'arrivée. Tu mets une temporisation à 15", ce qui arrêtera le Quad avant le virage.
Si tu optes pour le B, il devra être démontable, sinon, effectivement, tu ne pourras pas monter les servos et les palonniers.
L'avantage du B, c'est que l'extrémité de l'axe du servo est maintenue. Parce que là, dans ton montage, je suppose que les 2 axes ne se rejoignent pas sur un roulement double.
Bravo pour tes projets 2021 !
- pat92fr aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#174
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 13 janvier 2021 - 11:53
Je me demande s'il y a des ratios 'magiques' pour la conception des quadrupèdes !
J'ai fait une copie de cette image dans Paintnet, et je trouve un rapport en pixel de longueur/largeur(hors tout), soit 1400/1000=1,4
Alors que moi, je suis plus proche du carré, https://www.robot-ma...attes/?p=112451
https://github.com/o...d-robot-8dof-v2
https://github.com/o.../solo8_v2_2.jpg
- pat92fr aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#175
pat92fr
-
- Membres
-
- 844 messages
Membre passionné
- Gender:Male
Posté 13 janvier 2021 - 09:03
Ok, je vais faire un robot un peu plus large !
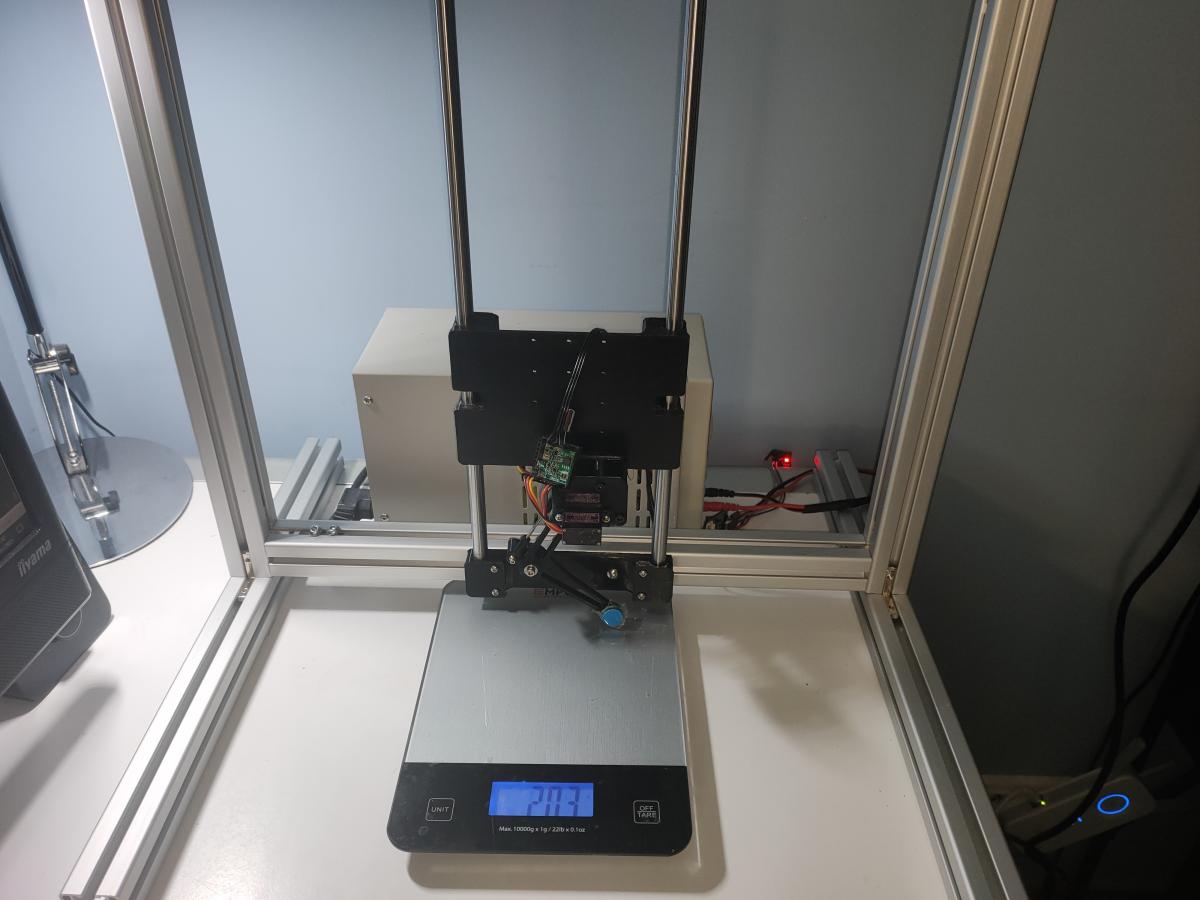
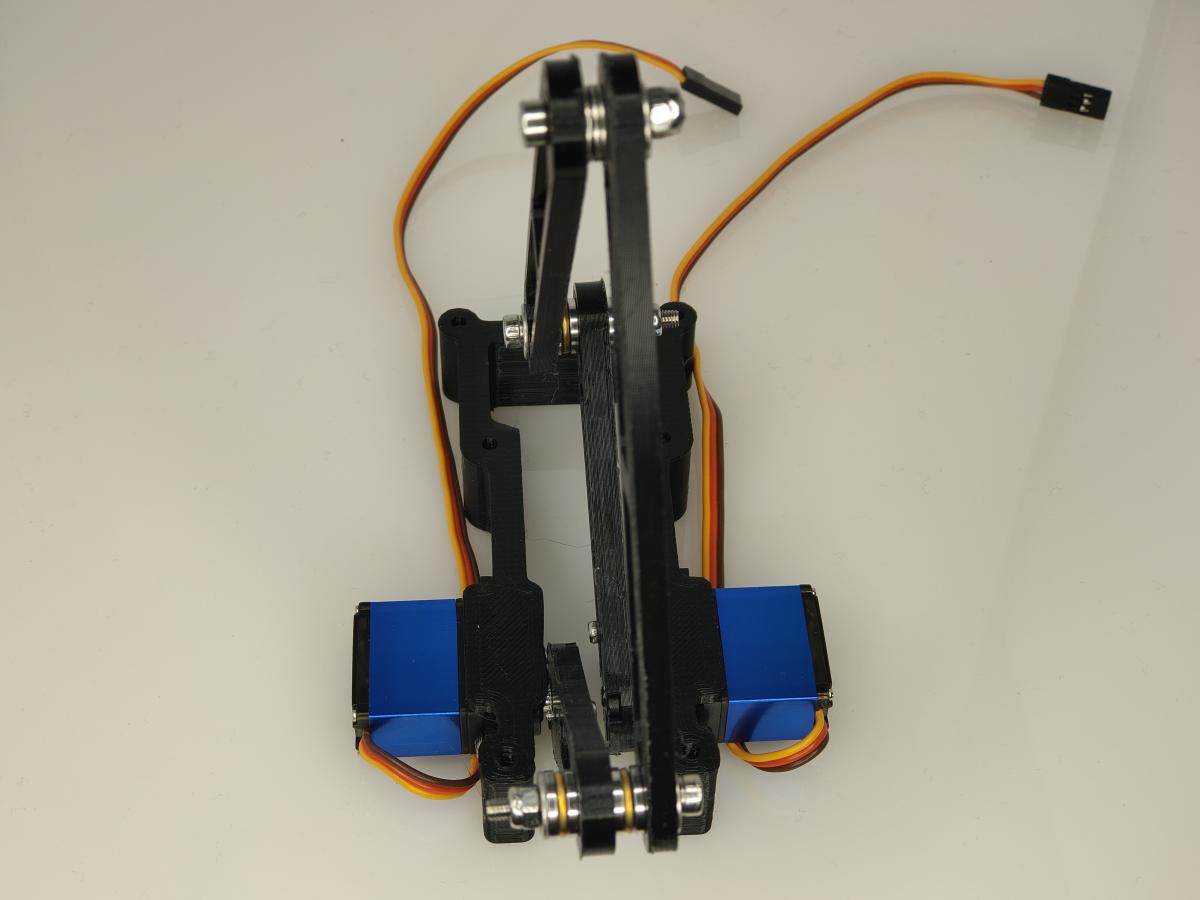
Je viens de faire un premier essai avec du carbone de 1.5mm. C'est plutôt rigide. La déformation provoquée à la main entraine une translation vers le haut ou vers le bas, des bras de la fourche. La position du pied bouge légèrement. A la main, on a vite fait d'appliquer une force importante. Sur mon plan 3D, j'avais prévu du 1mm. Ca risque d'etre un peu trop souple. A voir.
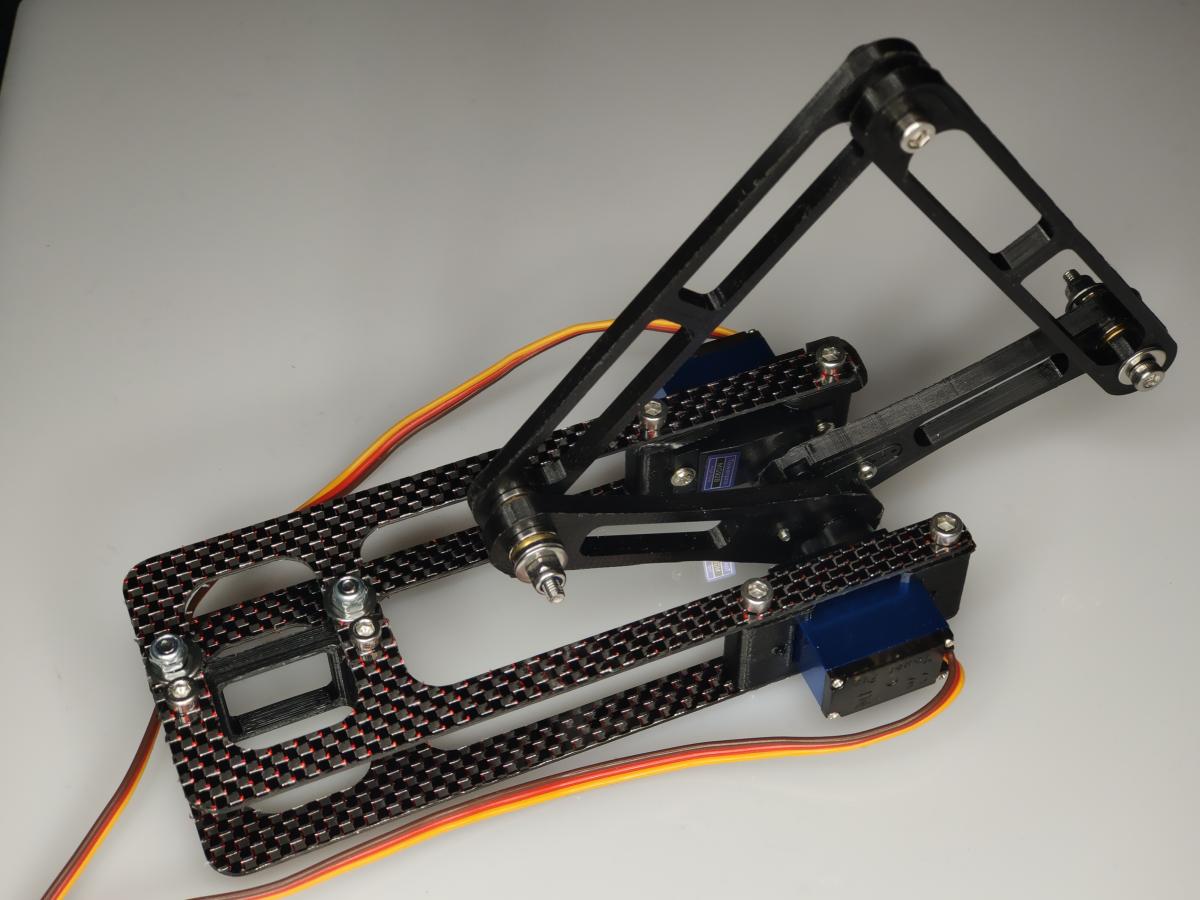
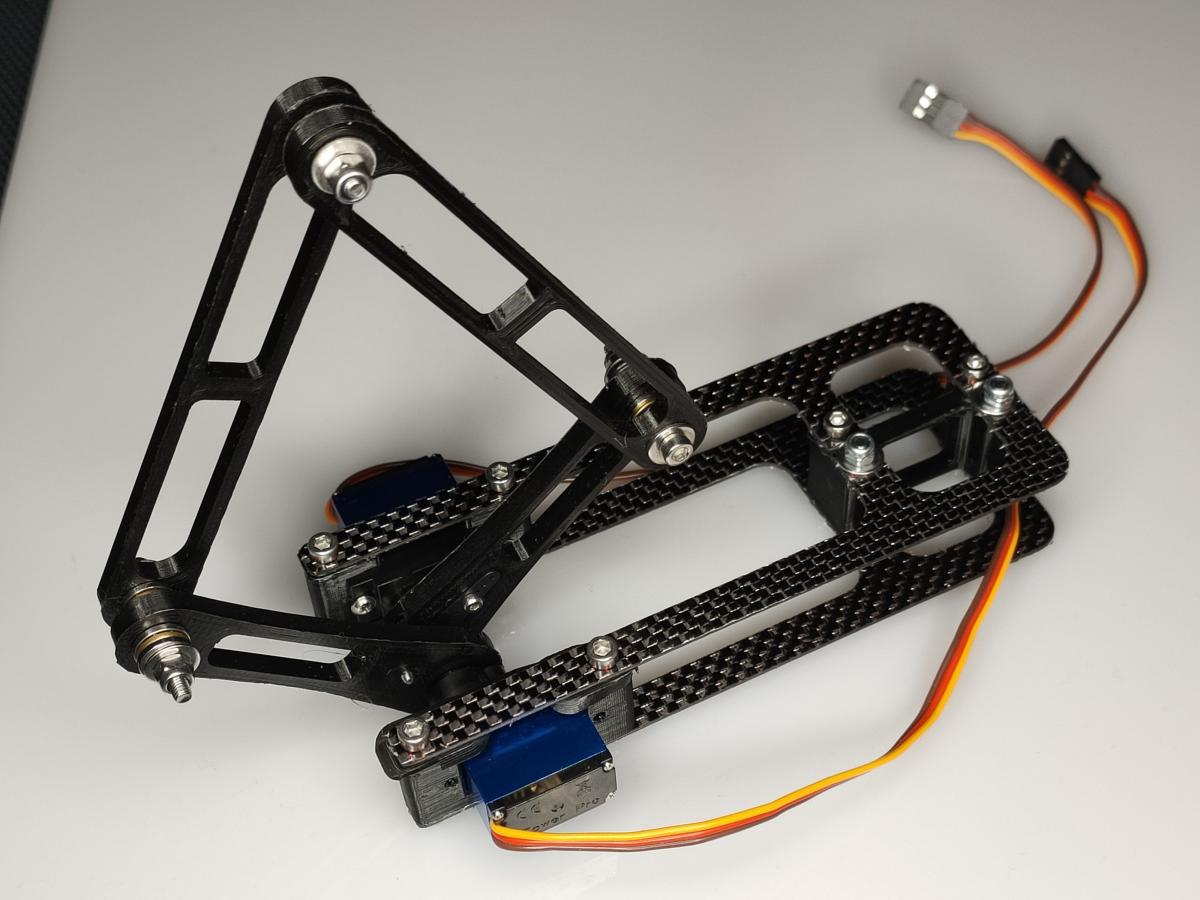
Ce module pèse déjà 80g (66g dans la CAO)... 
Petite séquence vidéo de l'usinage en PJ. C'est la plaque carbone chinoise de nature un peu douteuse que j'ai attaqué.
A suivre..
Fichier(s) joint(s)
-
 VID20210113183236 (convert-video-online.com).zip 3,85 Mo
231 téléchargement(s)
VID20210113183236 (convert-video-online.com).zip 3,85 Mo
231 téléchargement(s)
#176
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 14 janvier 2021 - 08:30
Super matos !
Pourrais-tu peser l'équivalent de ta visserie et me donner le résultat ? La visserie nylon est beaucoup moins lourde !
Le problème de ce montage, c'est la force transversale exercée sur l'axe des servos. Si, à la jonction des axes des servos tu mettais 2 roulements collés dos à dos, l'extrémité de l'axe de chaque servo serait supportée.
Sur mon Quad, l'axe du 4 barres est indépendant de l'axe des servos. De plus, les forces transversales sont contre balancées par la largeur de la patte et le maintient de l'axe sur toute sa longueur.
Cela peut tenir en raison du faible poids et de la taille de ton Quad, mais pour faire plus gros, à mon avis, tu devras augmenter le diamètre de ton axe.
- pat92fr aime ceci
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#177
pat92fr
-
- Membres
-
- 844 messages
Membre passionné
- Gender:Male
Posté 17 janvier 2021 - 01:30
Bonjour,
Bonne idée la visserie nylon ! Ca va devenir incontournable pour gagner en poids.
Entre deux tours de brushless, j'en suis là pour le robot à base de micro servo :

Tout tient dans un sachet et le résultat n'est pas très bon :

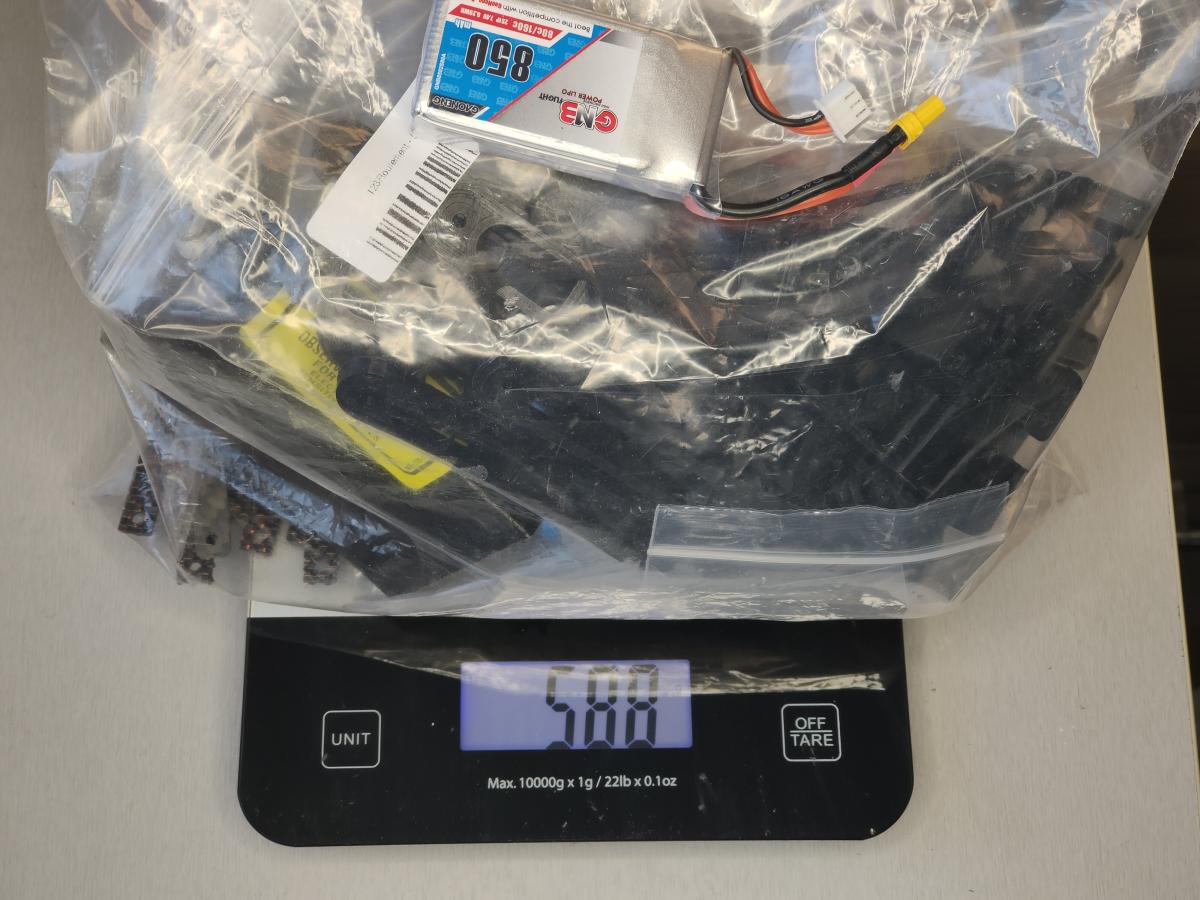
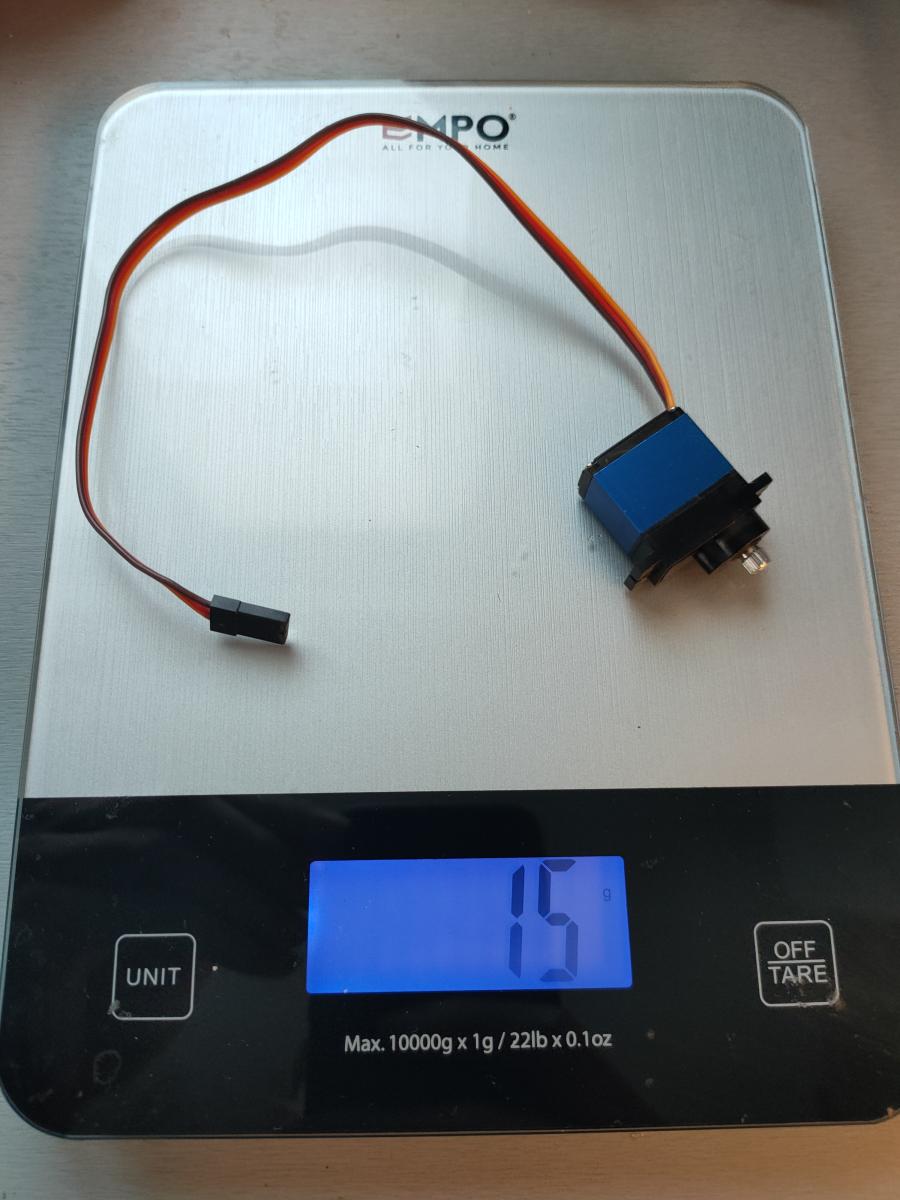
L'idée étant de faire la démo de la petite carte SMS, il faut accepter l'augmentation de poids du servo amélioré :

Par type de matériau :
- Plastique:

- Carbone

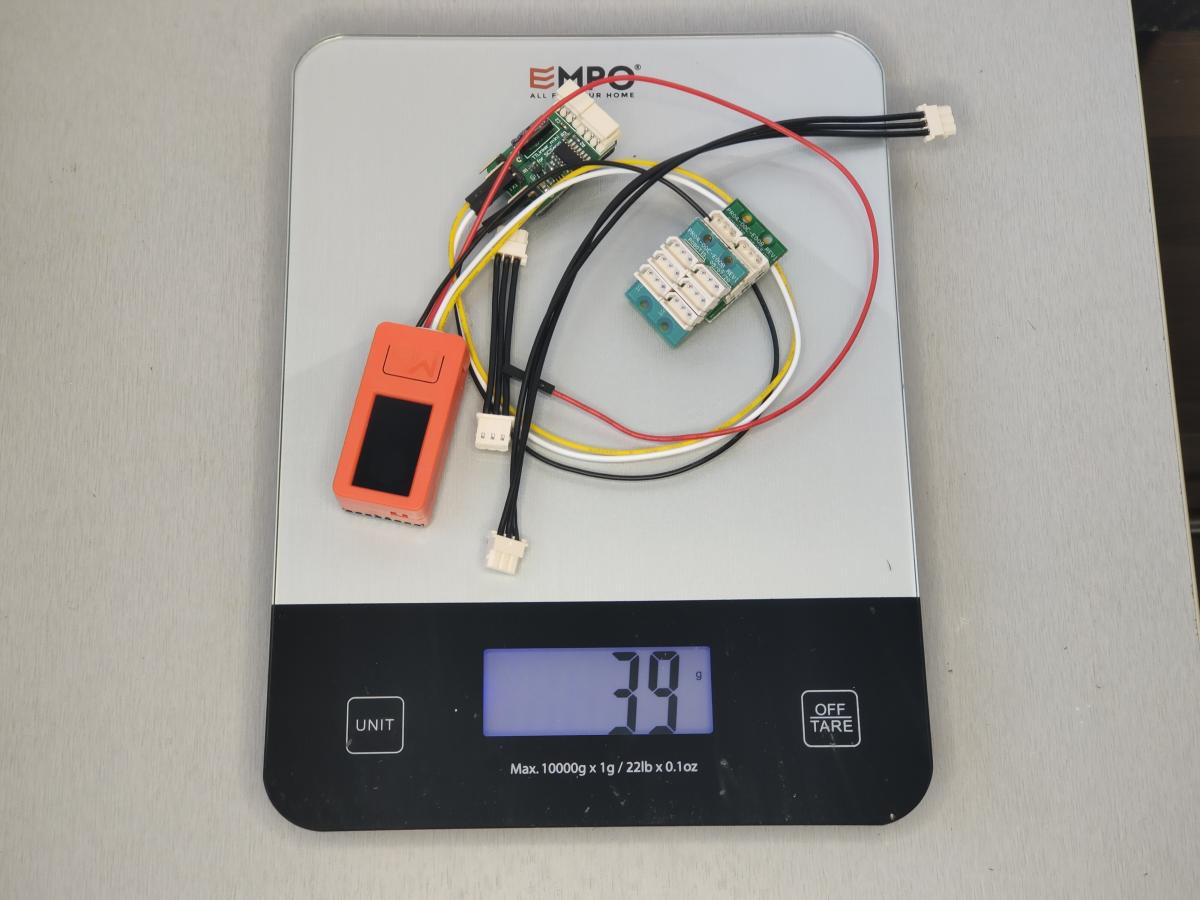
- Electronique

- Servo = 8x21g = 168g
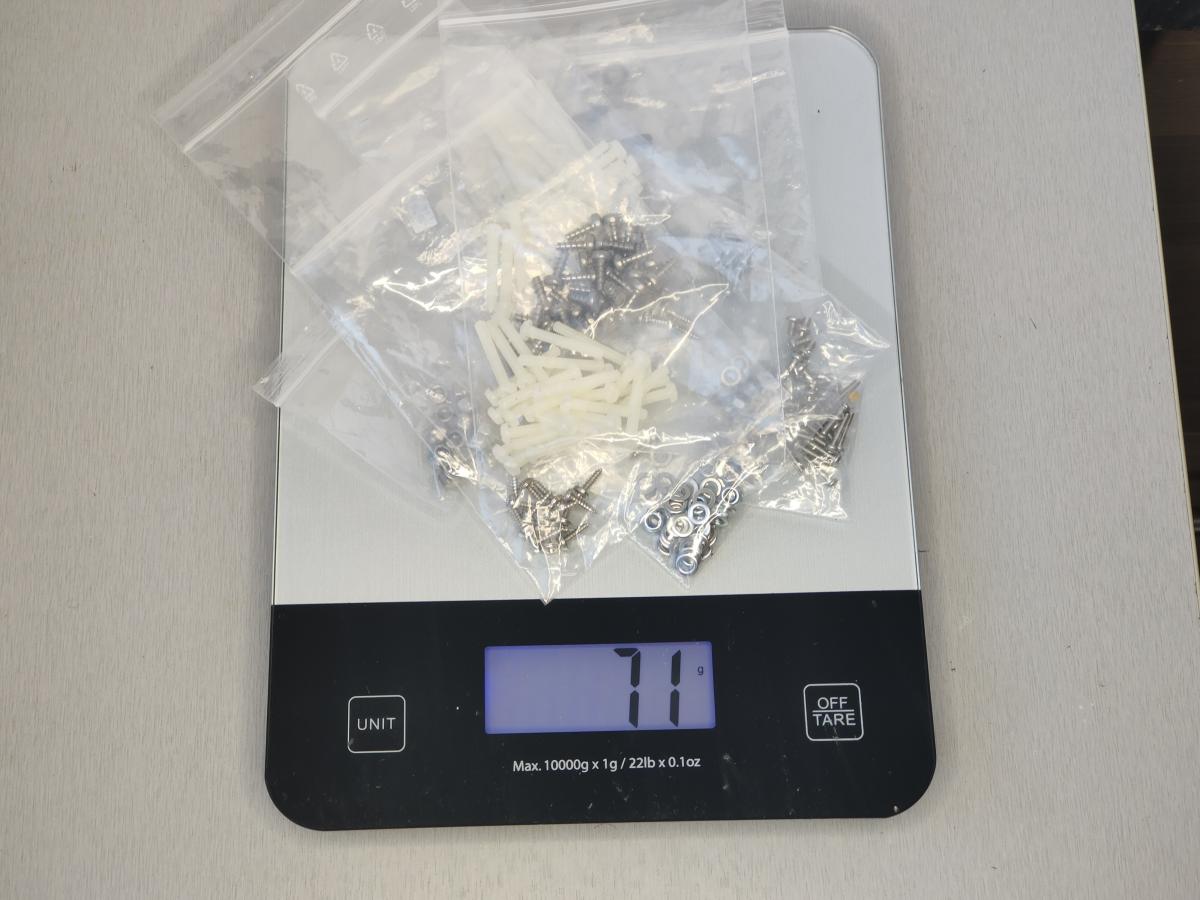
- Mécanique (visserie/rondelles à gauche et butées à billes à droite)

Axes d'amélioration :
- Passer toute les boulons en nylon, et remplacer les écrous (dont nylstop) et les rondelles en inox.
- Pour les vis autotaraudeuses assurant la fixation entre les pièces carbone et plastique, c'est de l'inox encore. Passer en M2 et/ou remplacer par de la vis alu ou titane. En dernier recours car la vis coute 2€ l'unité !
- Coller les pièces carbone et plastique, quand je serai sur de la forme. Ca élimine une bonne partie de la visserie.
- Pour les jambes, je vais supprimer les butés à bille et les remplacer par de simples rondelles (inox ou plastique). Igus fait des choses bien dans ce domaine aussi. C'est peut etre une piste.
- Le boitier des cartes SMS est lourd (PLA+visserie inox). Je vais coller la coque PLA et réduire son épaisseur.
A suivre...
Patrick.
- Oracid aime ceci
#178
pat92fr
-
- Membres
-
- 844 messages
Membre passionné
- Gender:Male
Posté 17 janvier 2021 - 01:34
Le problème de ce montage, c'est la force transversale exercée sur l'axe des servos. Si, à la jonction des axes des servos tu mettais 2 roulements collés dos à dos, l'extrémité de l'axe de chaque servo serait supportée.
Sur mon Quad, l'axe du 4 barres est indépendant de l'axe des servos. De plus, les forces transversales sont contre balancées par la largeur de la patte et le maintient de l'axe sur toute sa longueur.
Et oui ! Alors j'ai besoin de faire des essais, pour voir comment se déforme les pattes en transversal. Ca peut être un problème de ce type de design, bien que les butées à bille offrent un bon maintien. Au niveau du palonnier des servo, c'est le point faible. Ca se déforme bcp en effet. J'ai une idée pour faire la jonction entre des leurs palonniers de servo, tout en conservant leur indépendance de rotation. J'attends de voir ce que ca donne dans l'état !
#179
Oracid
-
- Modérateur
-
- 7â¯030 messages
Pilier du forum
- Gender:Male
Posté 23 janvier 2021 - 11:34
Petite question.
Pourquoi, as-tu choisi le STM32 plutôt que l'ESP32 ?
Ma chaine YouTube : https://www.youtube..../oracid1/videos
#180
pat92fr
-
- Membres
-
- 844 messages
Membre passionné
- Gender:Male
Posté 23 janvier 2021 - 11:36
Bonjour,
Tu parles du STM32 sur la petite carte ? Dans le M5StickC, c'est un ESP32.
Patrick.








1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users


{kind=link}