Bonjour à tous,
Je me suis lancé dans la fabrication d'un banc pour effectuer des tests d'adhésion sur des revêtements. Ce test doit suivre une norme bien spécifique, si spécifique que je ne trouve pas de matériel dans le commerce . 
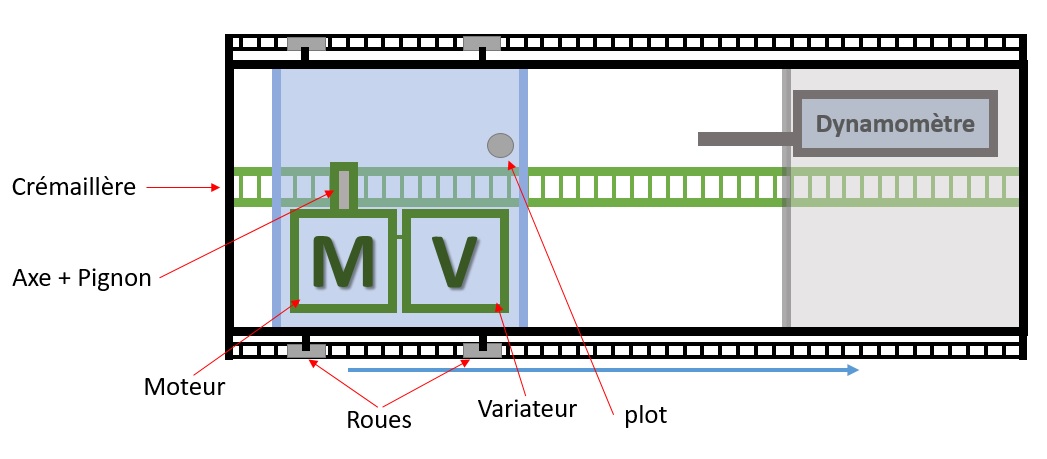
Alors voilà : il s'agirait de fabriquer une plateforme qui se déplacera sur un seul axe, sur cette plateforme je viendrai coller des sortes de plots et le mouvement de la plateforme entrainera les plots vers un cylindre relié à un dynamomètre. Le but étant de mesurer la force nécessaire à décoller le plot de la plateforme.
J'ai pensé à fabriquer une sorte de cadre avec des profilés en aluminium sur le quel la plateforme mouvante roulera vers le dynamomètre. Sur cette même plateforme je viendrai fixer un moteur à pas muni d'un pignon qui viendra interagir avec une crémaillère sous cette plateforme ( j'aurai prévu une fenêtre ou autre chose ). Ce moteur sera lui même commander par un variateur.
Car je sais que mes explications me semblent clair mais ne le sont pas forcément je vous joint un petit schéma en vue du dessus 
C'est tout à fait simple dans l'idée mais j'ai quelques problèmes qui sont les suivant :
- J'ai besoin d’appliquer une force constante sur mon plot, à savoir environ 4.5N.s-1 et je ne sais pas comment choisir mon moteur en fonction de ça. J'ai par exemple trouver un moteur à pas dont la fiche technique m'affiche une "max axial force" de 10N mais je ne suis pas certain qu'il s'agisse de la même chose.
-Je ne suis pas certain de savoir choisir un variateur en fonction de mon moteur... 
- Les fiches techniques des crémaillères parlent de "pitch module" ( module de pas ? ) et je ne sais pas trop à quoi ça correspond.
Enfin voilà, si vous avez une réponse ou même simplement une remarque je suis tout à fait preneur  .
.
Bonne journée à vous.
Florian