Voici mon dernier quadrupède qui, maintenant, possède 12 degrés de liberté.
Pour l'instant, je l'ai testé avec 8 degrés de liberté, en bloquant les 4 nouveaux, il marche très bien.
Je ne suis pas certain d'avoir une grande disponibilité les deux prochains mois. Je pense commencer le développement et faire une vidéo à la rentrée.
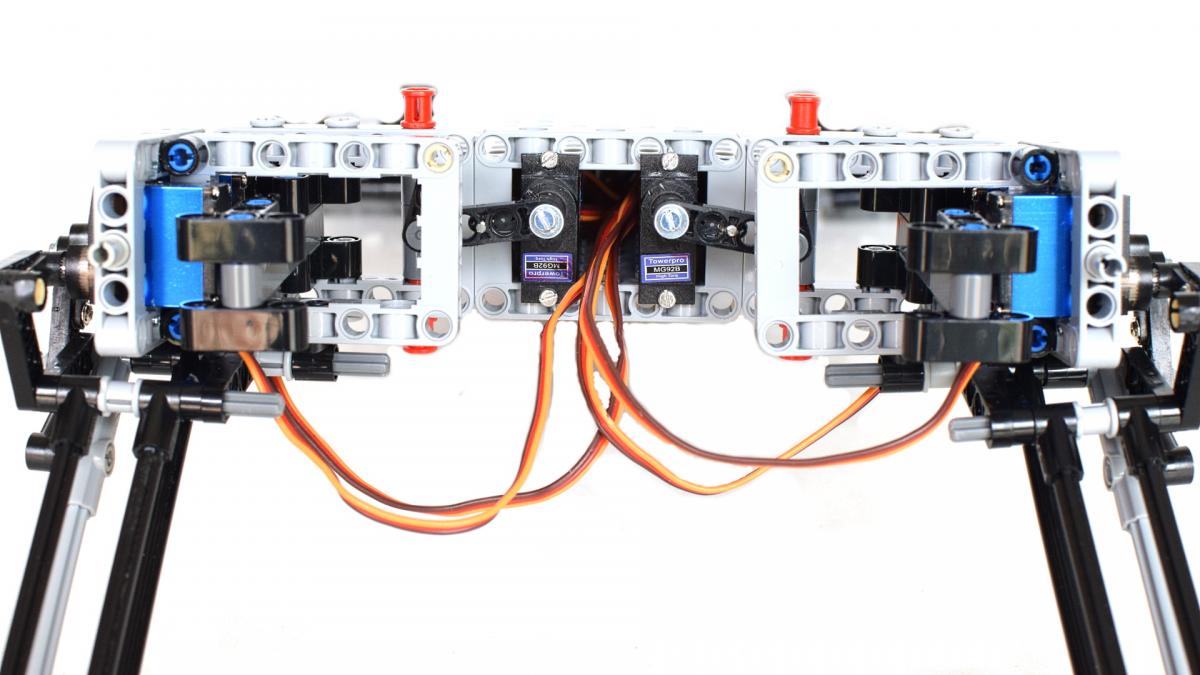
Comme vous pouvez vous en douter, la partie mécanique a été une véritable prise de tête. Au final, j'ai réussi à mettre les nouveaux servos au plus près du centre de gravité.
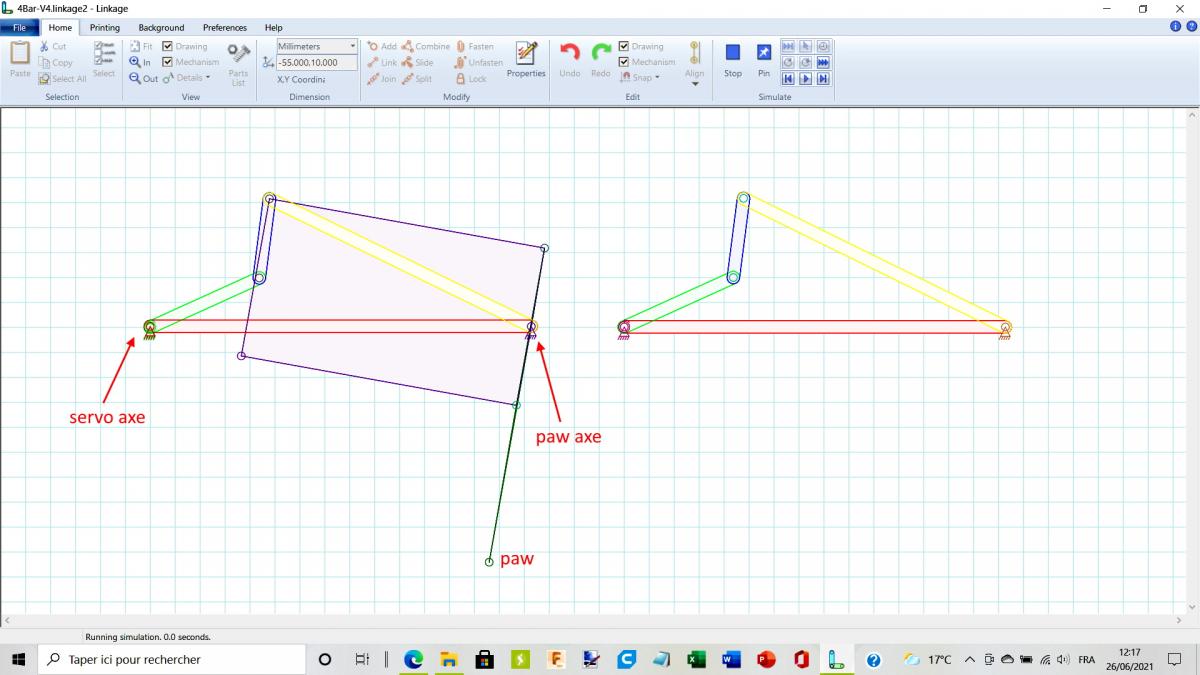
Notez que l'axe de rotation de l'épaule est sur le plan des axes X et Y de la patte. C'est rarement le cas sur les quadrupèdes, même les plus évolués. Cela a l'avantage de simplifier les calculs.
Le corps central s'est épaissi. La rigidité en a été augmentée et l'électronique est camouflé.
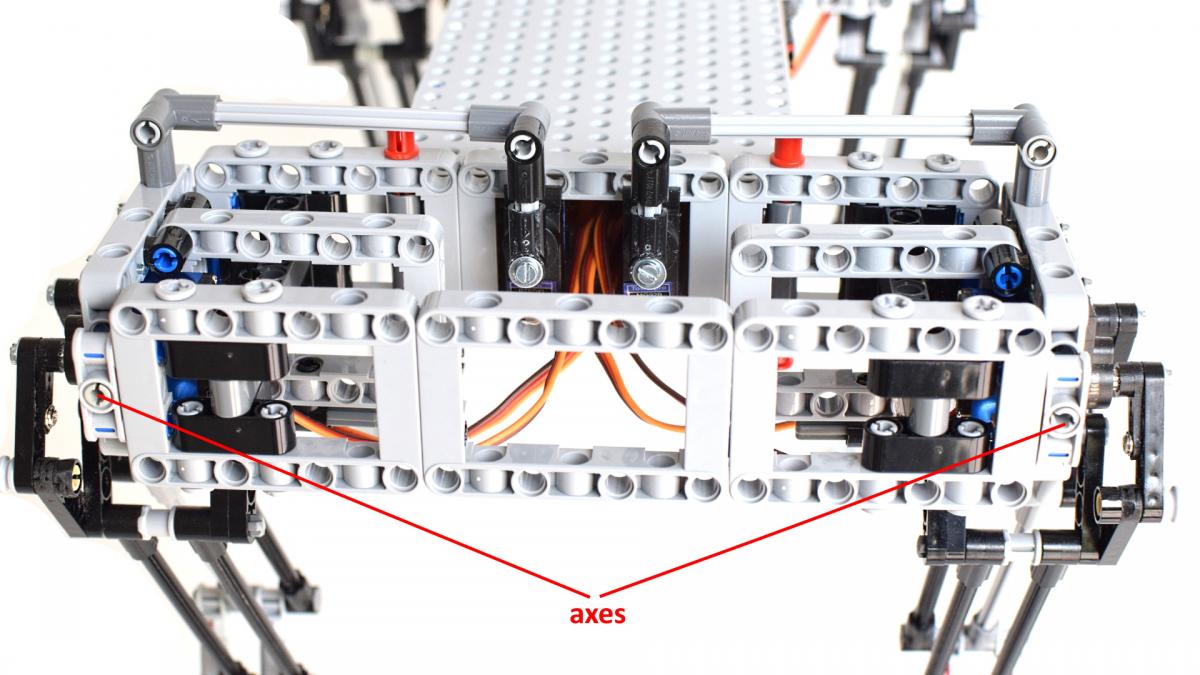
Les trains avant et arrière ont pris également du volume, j'ai eu du mal à les rigidifier. J'ai trouvé la solution grâce à 2 traverses avec des équerres, une à chacune extrémité, passant au travers des cadres de fixation de la patte. Sans cette idée, le projet serait peut-être tombé à l'eau.
En passant de 8 DOF à 12 DOF, le poids est passé de 500g à 700g. C'est inespéré ! Je me demande s'il existe un 12 DOF de cette taille avec ce poids.
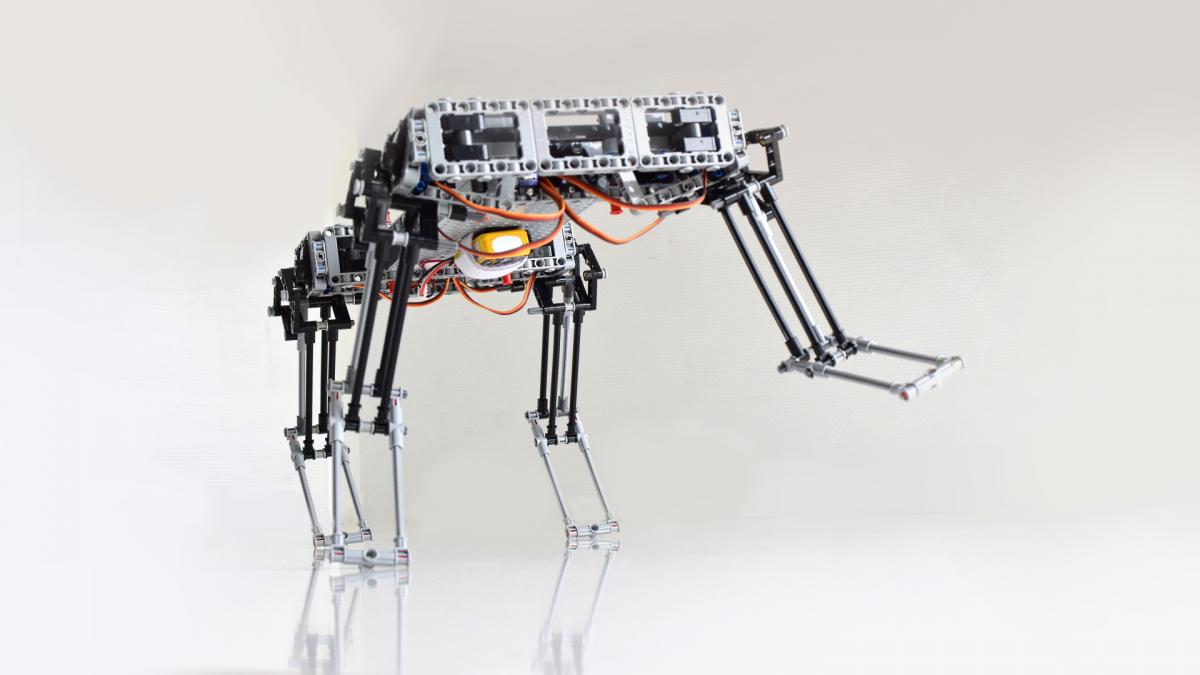
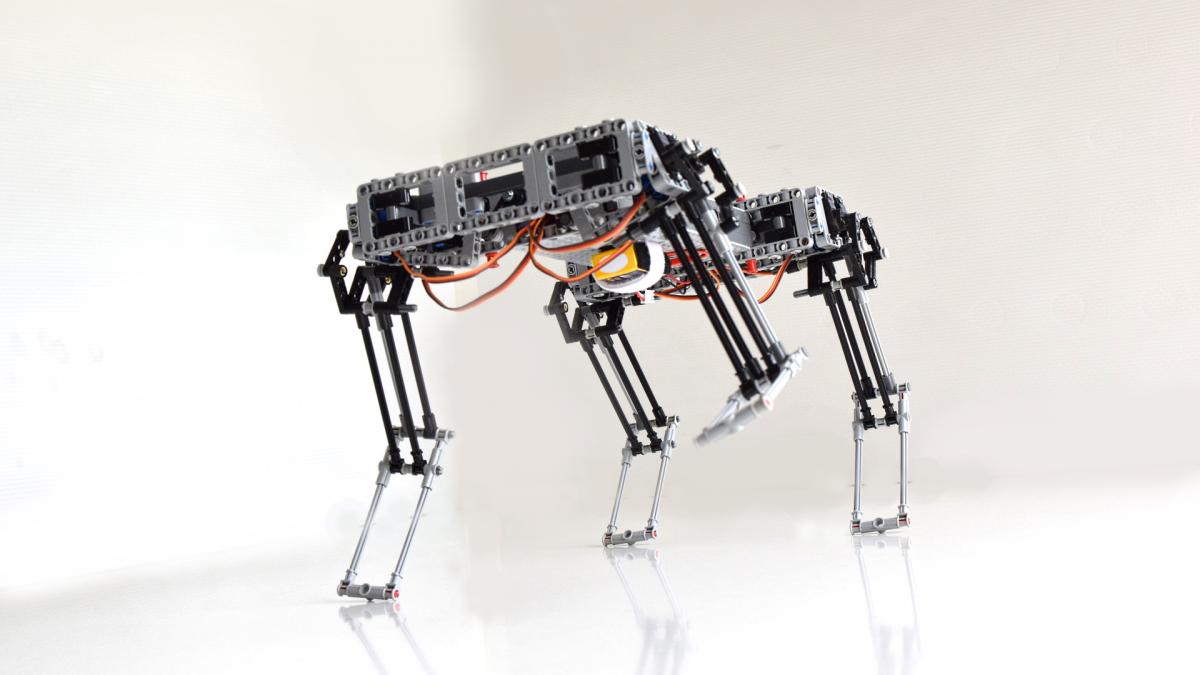
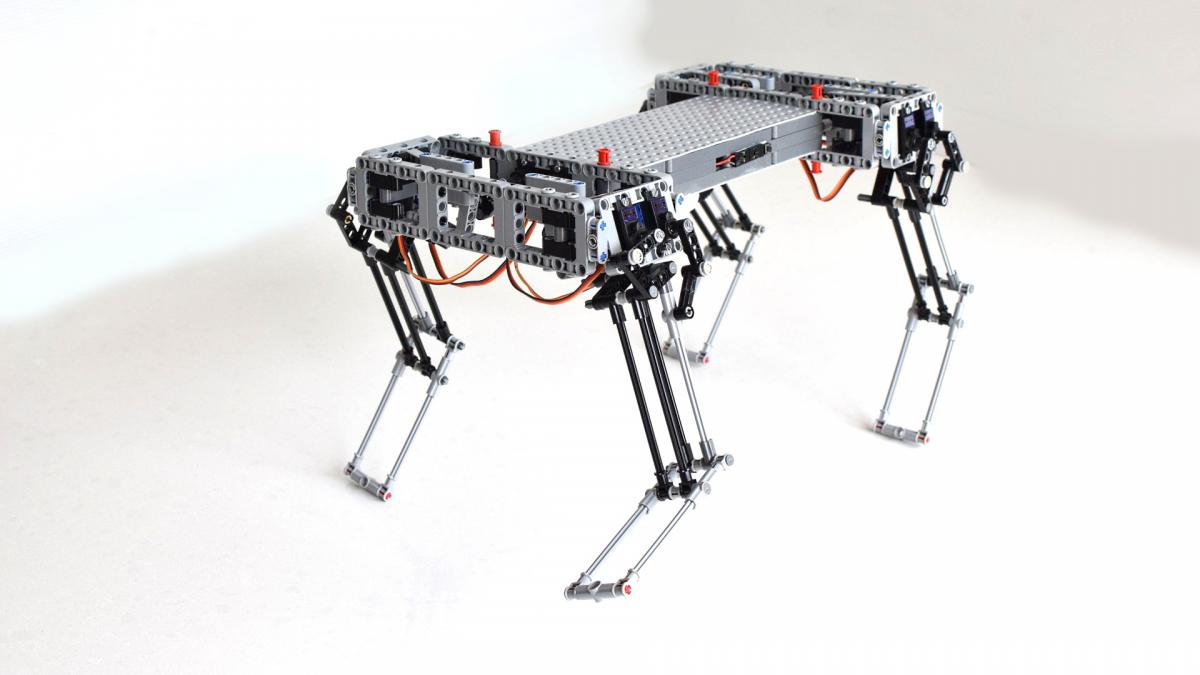
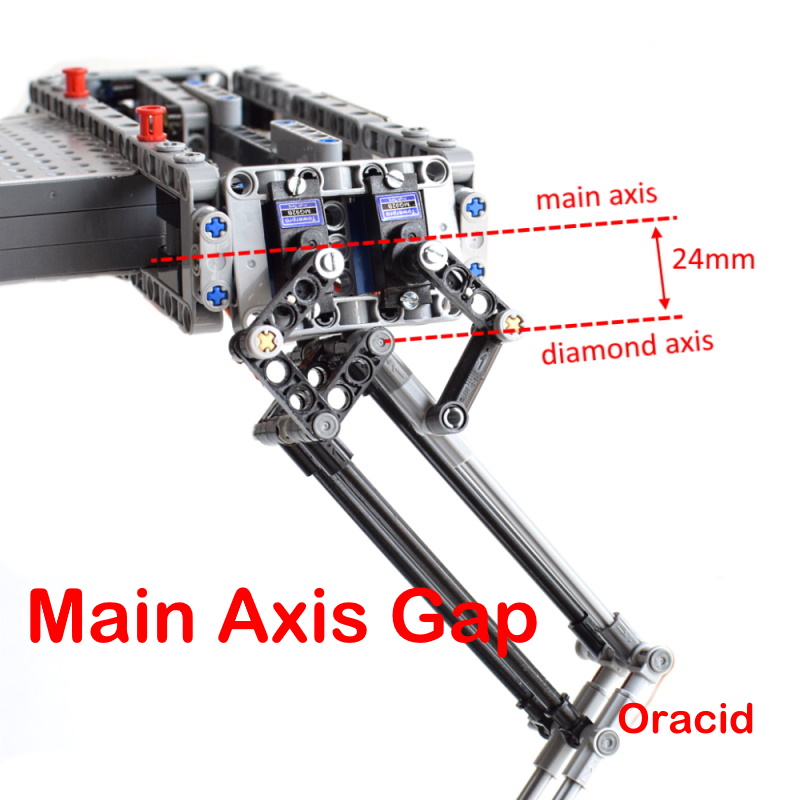
Voici quelques photos qui mettent en évidence le nouveau degré de liberté de l'épaule.
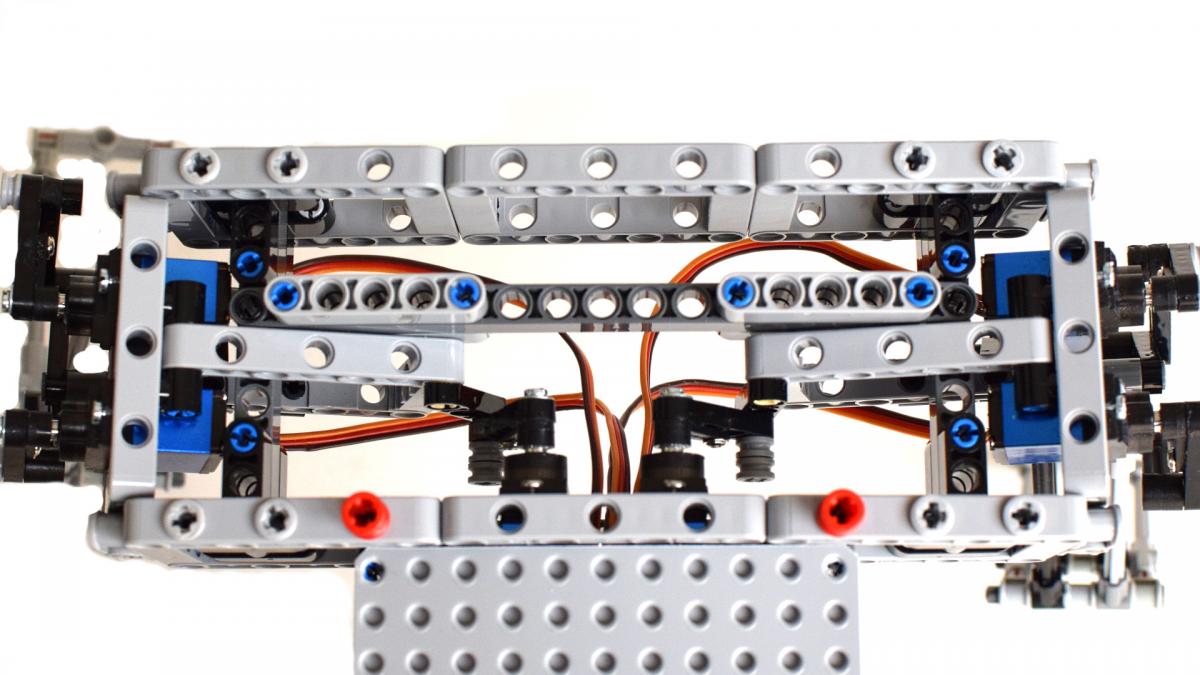
La dernière photo montre le détail de l'actionneur de l'épaule. Je reviendrai sur son principe de fonctionnement.
Cliquez moi.