Bonjour à tous,
Depuis ma présentation le 4 novembre 2020, (une année...) j'ai avancé un petit peu.
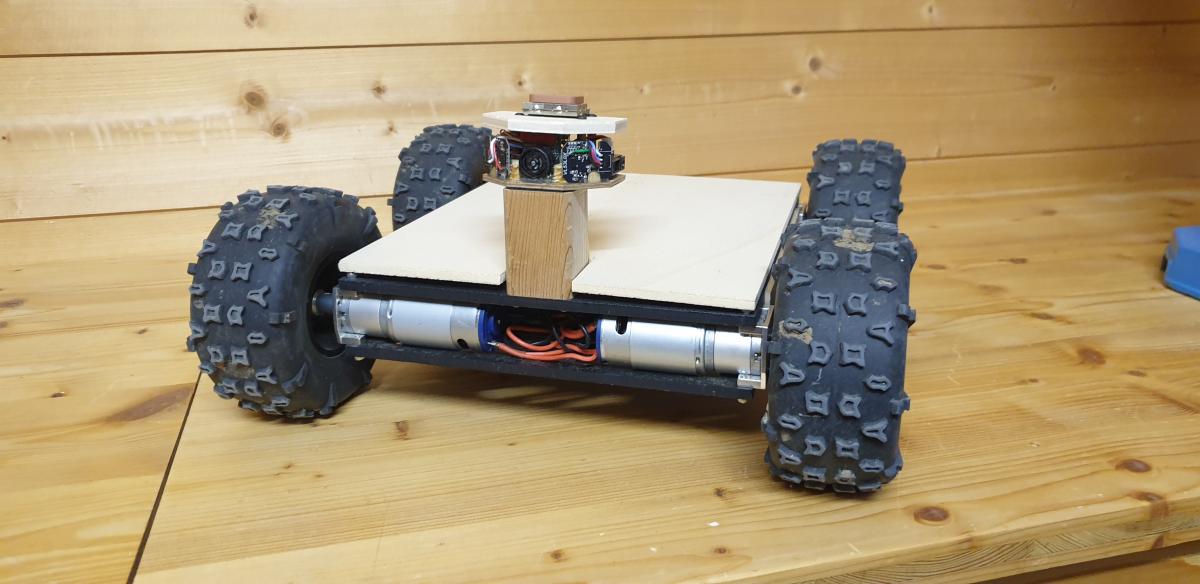
Je vous présente mon dernier Rover
Chassis : Base Prowler
Moteur : Moteurs du Prowler
Contrôleur : Sabertooth
Carte : Arduino Mega
Capteurs :
Face : MAXSONAR
Face droite : VL53LOX
Face gauche : VL53LOX
Droite : SharpIR
Gauche : SharpIR
Ne me demandez pas pourquoi ces capteurs (je les ais presque tous essayé), simplement sur ce modèle ils fonctionnent convenablement.
La configuration ci-dessus lui permet de rouler dans une pièce avec de nombreux obstacles, sans jamais les heurter et à trouver la sortie.
J'y ai ajouter un Compas, un Gps, un écran Lcd et un lecteur de carte Sd.
Avec cette configuration, il est capable (le code est amélioré presque tout les jours) de rejoindre un point GPS, malgré les murs, arbres, haies, plantes ect.
Je ne vous cache pas que je dois de temps en temps, l'aider un peu car il s'est coincé sous une plante, qu'il n'a pas suffisamment détecté.
J'ai oublié de dire que j'ai également implémenté une fonction télécommandé avec un récepteur FrSky, et un retour vidéo en HD avec un système DJI AirUnit.
Je n'utilise pas cette option, rigolo un moment, sans intérêt.
Salutation à tous.