


ah ha! the Pronk - as defined by the AI - Perplexity.ai
A pronk is a gait or leap in which a quadruped animal pushes off the ground with all four legs simultaneously, propelling itself into the air with its legs stiff. It is characterized by the animal jumping vertically with all four feet leaving the ground at once, often seen in gazelles, deer, and other ungulates when startled or threatened by predators.
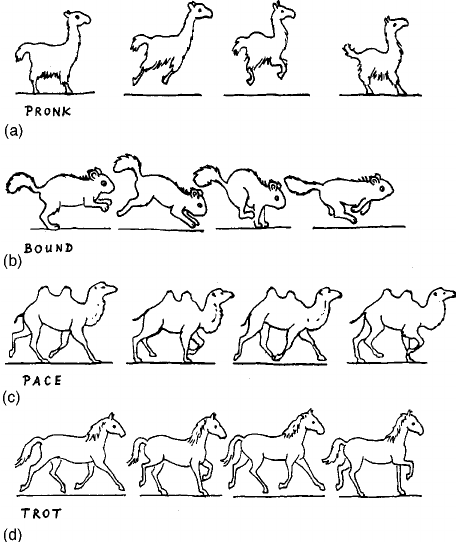
The pronk gait is considered an asymmetrical gait, where the relative phases of the left-right leg pairs are in unison (0% phase difference), rather than the alternating pattern seen in symmetrical gaits like trotting or pacing. During a pronk, the animal's center of mass follows a trajectory similar to that of a rigid body in free flight, with the potential and kinetic energies out of phase.
here is a cute picture:
It would be great to see one of our Quadrupedes do this! I have seen the videos of the Unitree quadruped do back flips, but not a pronk.














