Hi all,
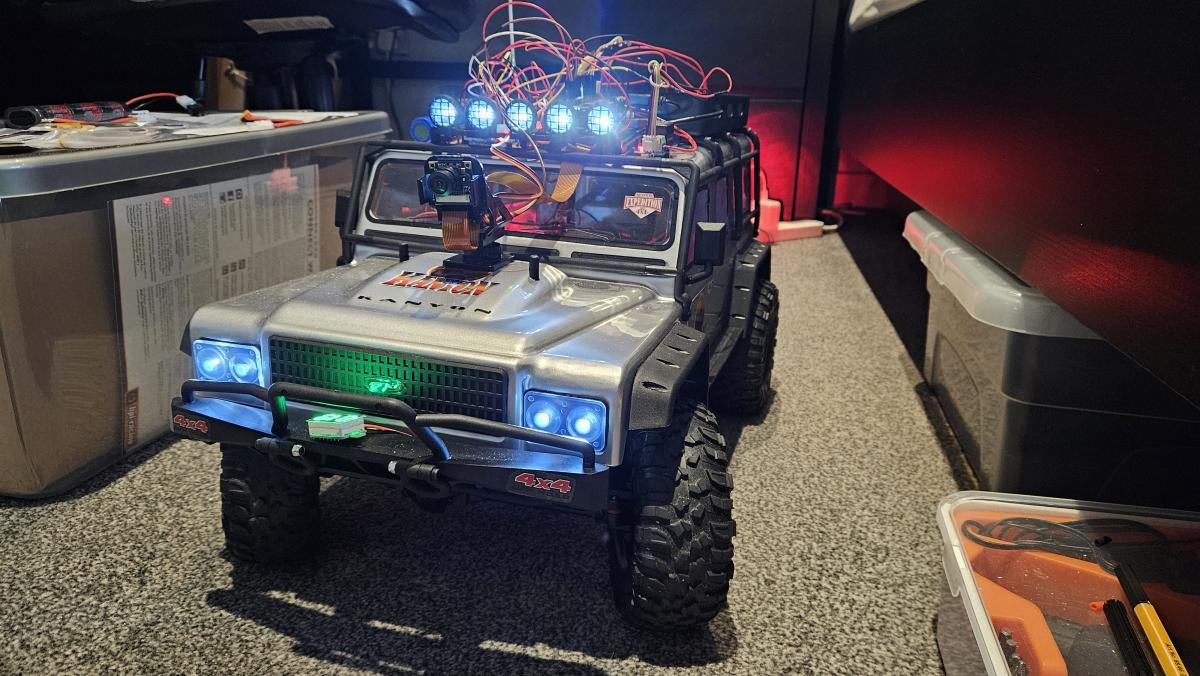
I've been working on converting the large 1:10 (more like 1:8) scale RC rock crawler to a Vigibot robot.
Most of the stuff is currently mounted externally on the body shell, so it's not weatherproofed and still a work in progress.
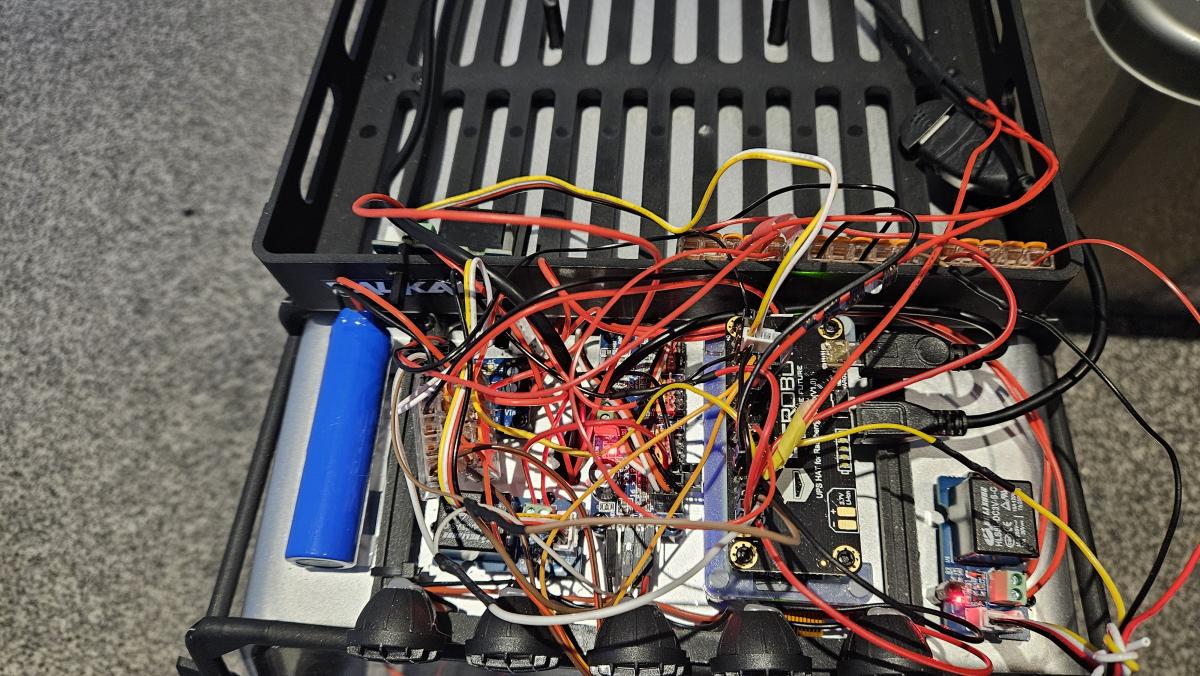
Low Voltage System:
Raspberry Pi Zero 2 W
2000mah 18650 cell
DFRobot Zero UPS Hat for raspberry pi, includes charge controller for the LV system, powered from the HV battery through DC-DC - https://wiki.dfrobot...o SKU: DFR0528
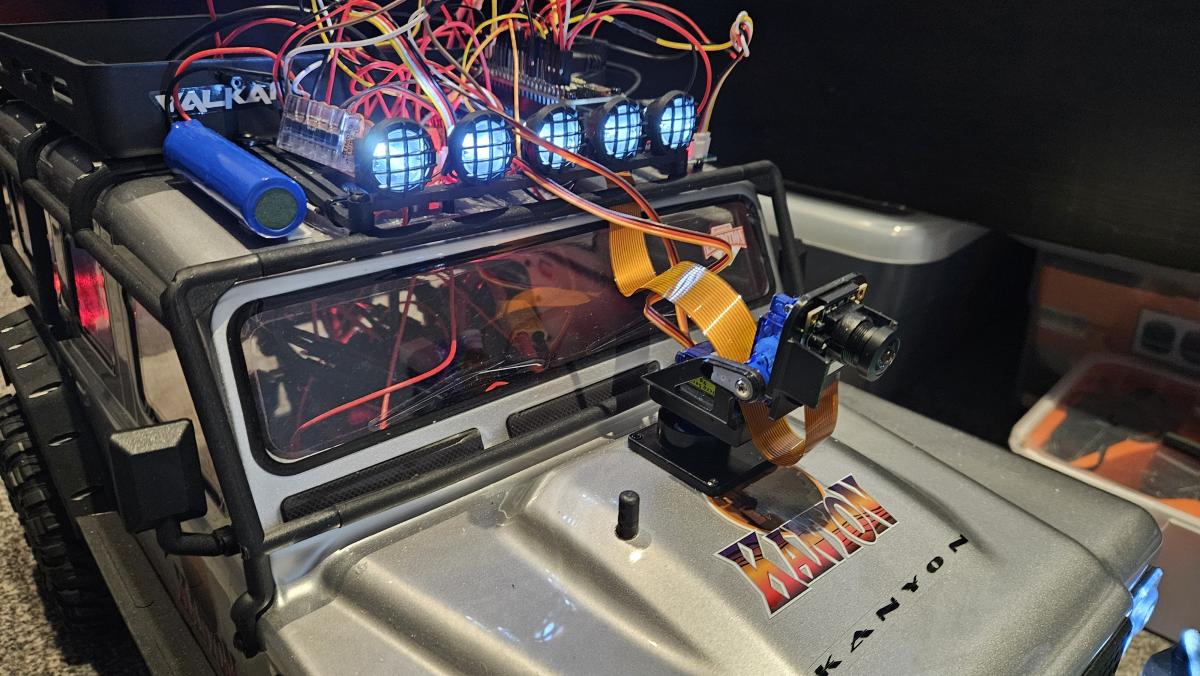
Pan/tilt camera mount with 2x TowerPro micro servos, wide angle raspberry pi camera
USB microphone
3x 5v relays (headlights via ESC BEC, battery heater via HV battery, DC-DC converter via HV battery)
INA260 High or Low Side Voltage, Current, Power Sensor, monitoring the voltage of the HV battery, and the current through the input of the DC-DC converter.
Pololu S13V30F5 DC-DC converter (5v regulator)
PCA9685 board for servo and esc control through Vigibot
DS18B20 1-wire digital temperature probe (for HV battery)
4g modem/router
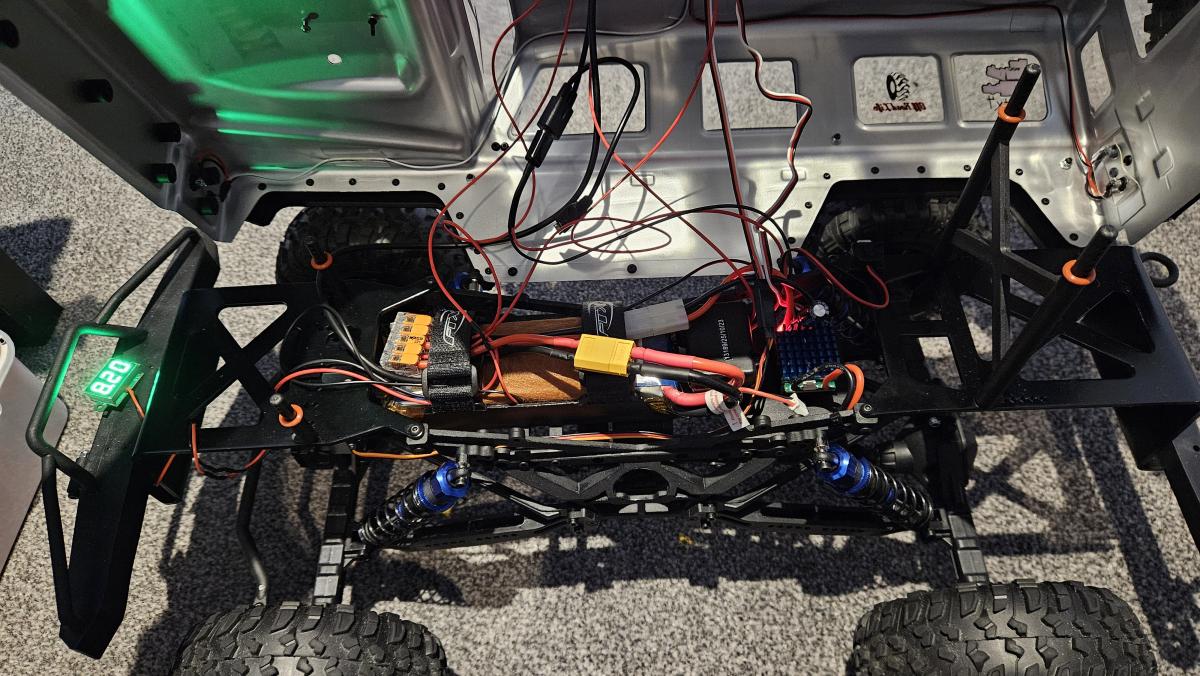
High Voltage System:
7.4v LiPo battery pack (2s) with DS18B20 temperature sensor
ESC (electronic speed control for motor)
Brushed DC motor
DC-DC converter sends regulated 5v to LV system through USB. Controlled via GPIO and relay.
Battery heater: https://thepihut.com...-pad-14cm-x-5cm- placed under insulated battery holder. Controlled via GPIO and relay.
Future upgrade:
Pololu RC servo multiplexer - allows you to switch from Vigibot internet control to local RC control.
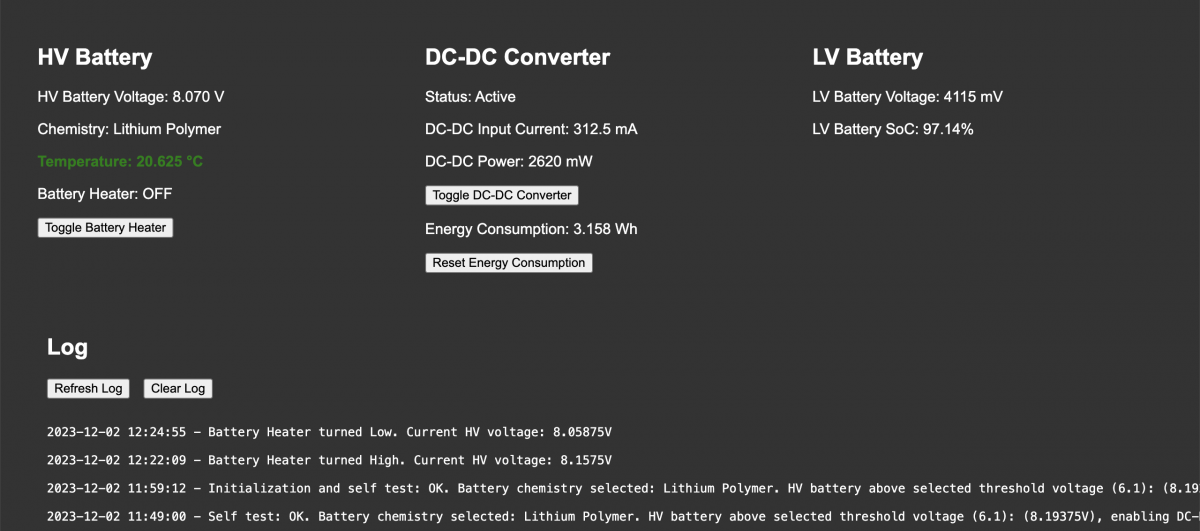
See screenshot of the basic software integration that shows the values from the sensor and provides some GPIO control and logging. These were for things not natively supported by Vigibot, but that I'm sure could be integrated. It also includes basic undervoltage protection that shuts off the HV loads (battery heater, DC-DC converter) if the voltage is below 6v for Lipo or 5.6v for NiMh packs.
Let me know if you've got questions/comments/suggestions/improvements!