


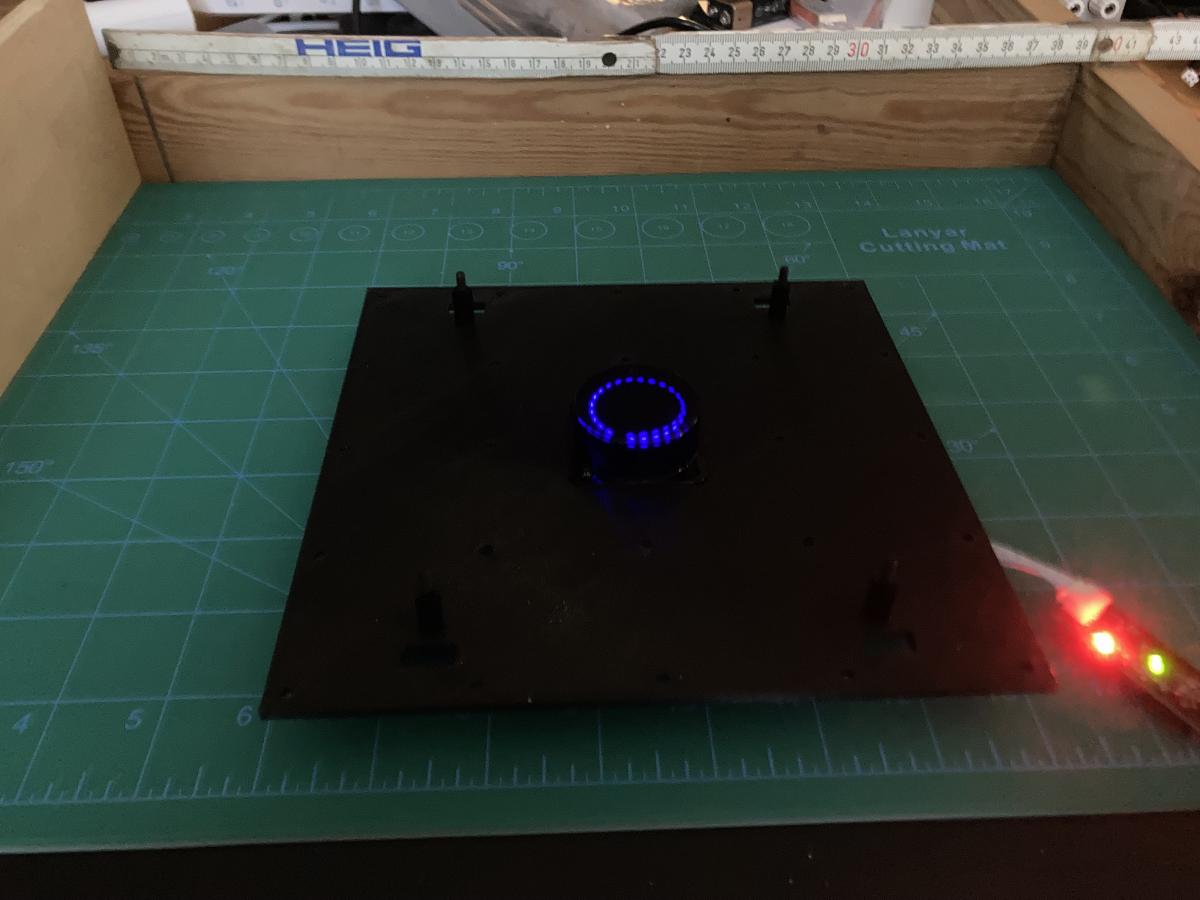
Ci joint quelques résultats de tests assez "étranges" avec le lidar LD06 :
Le setup: LD06->ttl/usb converter->PC
sur le PC : Ubuntu et ROS2, le driver https://github.com/l...ar_stl_ros2.git
la grille de rviz est configuré avec des cellules d'un centimetre
Test 1 :
Des murs à 8.5cm autour du lidar ( la plaque noir fait 17cm et le lidar est au centre )
Config :

Les mesures
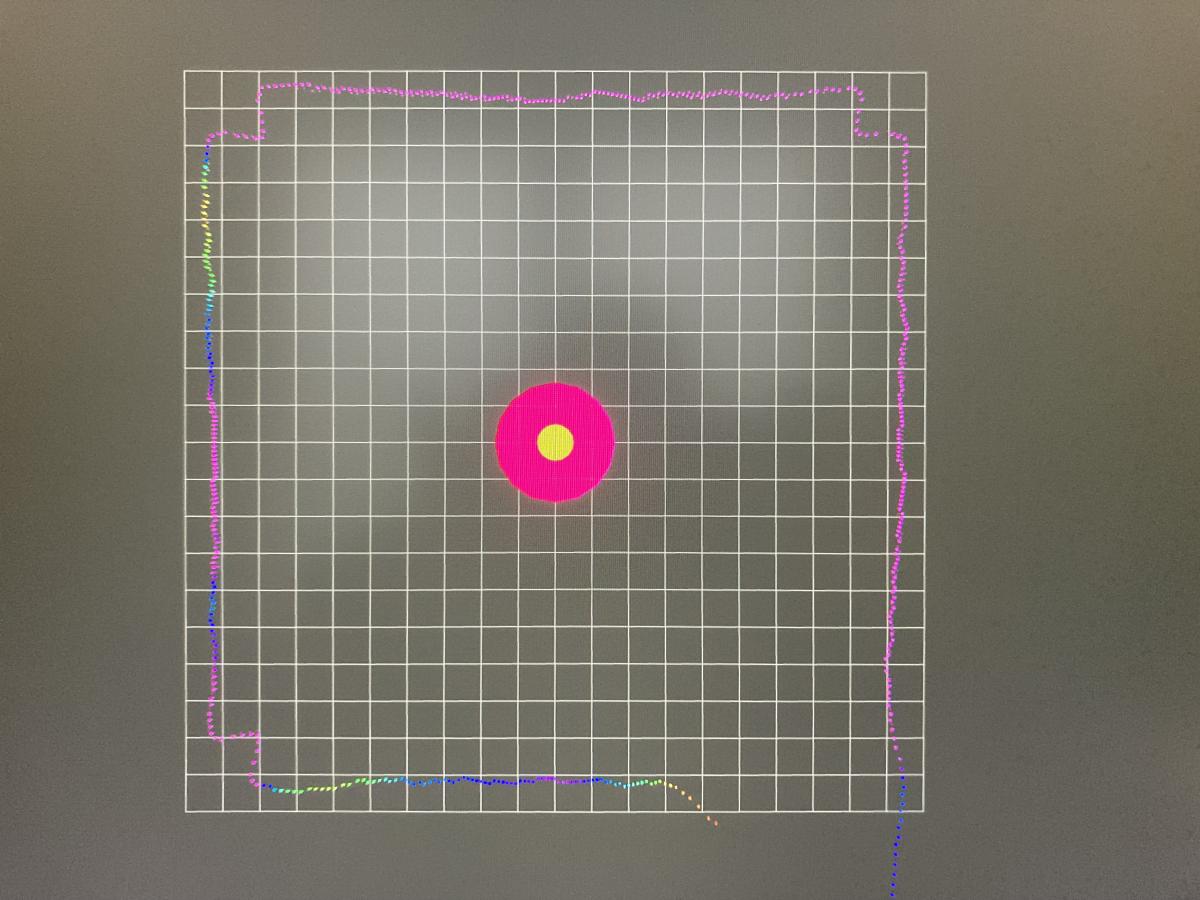
Déjà on a des phénomènes bizarre au niveau de 4 coins, et on a des erreurs de mesure...
Test 2 :
Même config mais avec quatre entretoises M3 plastique noir qui bloquent le champs du lidar ...

Les mesures :
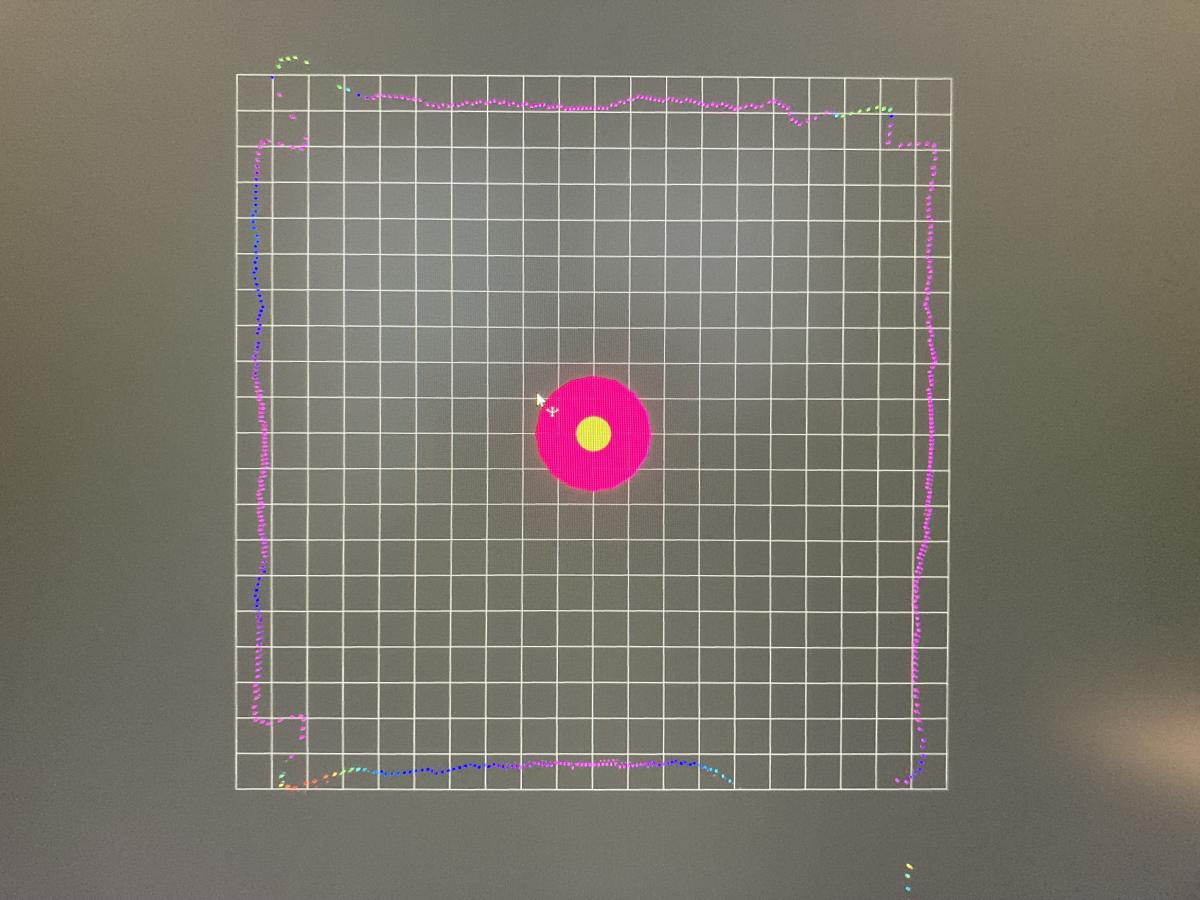
On retrouve toujours les éléments bizarre du premier test et on note l'impacte des entretoises ...
Test 3 :
Avec les murs à 20cm de distance :
Le résultat :
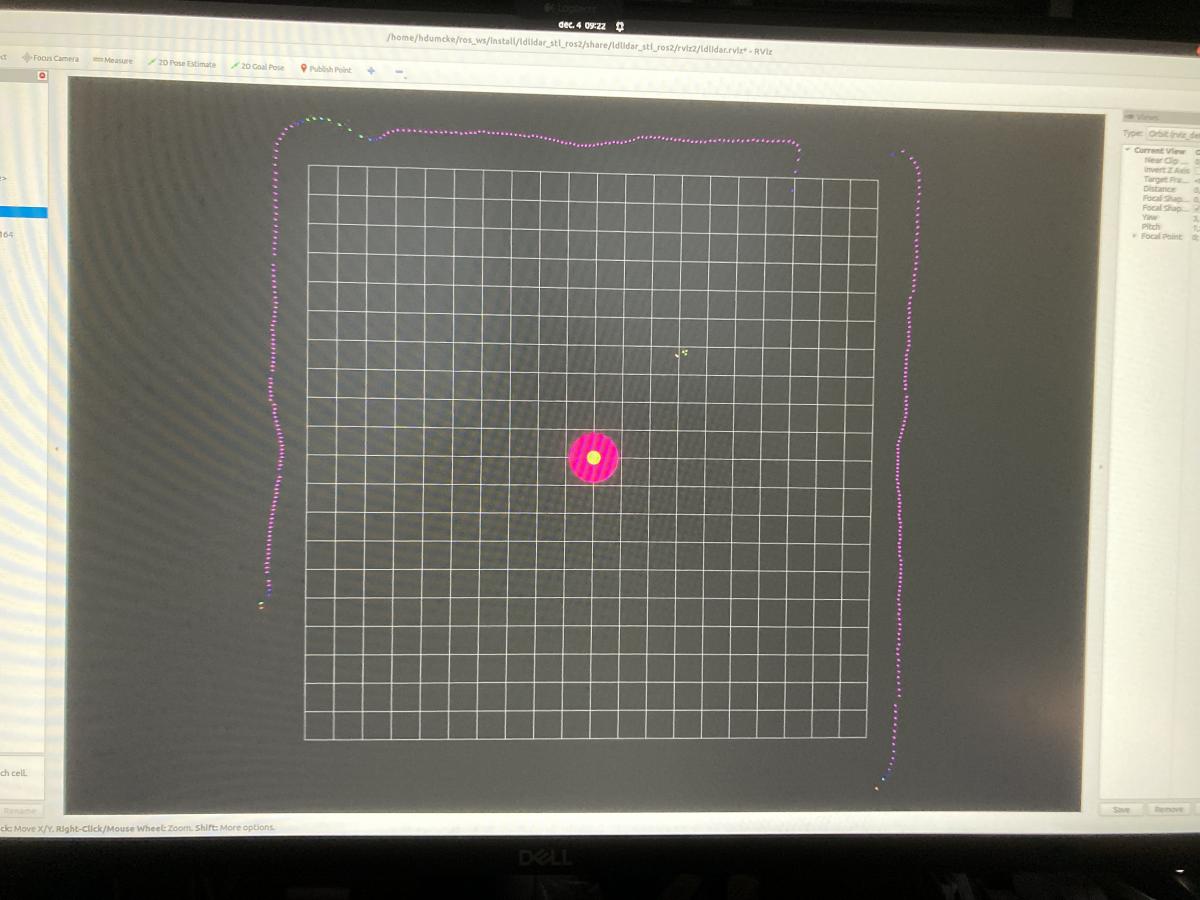
Le résultat est déjà mieux ... On comprend un peu mieux la limite de distance donnée à 20cm dans la datasheet du capteur... Mais on remarque quand même des erreurs de l'ordre de 1cm sur les mesures ...
On a également remarqué que le lidar ne tire pas droit ... le faisceau est incliné ce qui nous fait une mesure " conique " ...
( => D'où le fait d'utiliser le lidar "à l'envers " dans le cadre de la CFR pour que le faisceau du lidar ne passe pas au dessus des murs qui ne font que 7cm ... )
Est ce que le 1cm d'erreur observé est lié à cet angle ?
( To do : caractériser l'angle et faire plus de tests sur différentes surfaces )














