What is the question?
If you want a "smart wheel" yes you can have the wheel with the motor, encoders and motor driver...
But using a DC motor with an encoder is not the only working solution...
- You can also try "smart servomotors" that have 360° endless feature like the feetech I have,
- find some smart wheels (something like a smart servo with the wheel integrated ...)
- brushless motors ...
- Stepper or BLDC with and without external encoders ...
Each solutions have pros and cons ... price, weight, power, size, speed, torque, life time, complexity...
Thanks! Yes, my question is about experiences and other options out there for purposes of motor odometry. My goal is to build a platform to explore Localization and Mapping (SLAM). I am thinking more rugged outdoor locations requiring good torque, life time, power. I would tend away from servo motors and steppers, only because I sense that outdoors is not the best environment for that. Brushless with encoders might be interesting in this scenario. My base thoughts are DC Motor and Encoder. I have no experience with the encoders, that is part of my question.
Currently, I am considering 'recycling' roomba motors. These motors assemblies have an encoder contained on the motor/gearbox. I just need to decode the signals needed. For the motor driver, I will need to provide a new solution as the roomba driver is built into the roomba main board.
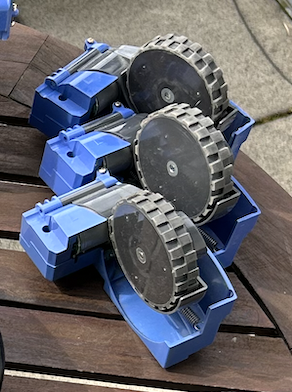
My interest is similar to @ppmd, so this is a great topic. And interesting to follow to learn more. For my project, my preference is to try to reuse these roomba motors if that is feasible, and save my money for the sensors (lidars!)





















