Cette année encore nous participons à la coupe de Robotique dans la catégorie "légende" ( les "vieux" de plus de 30 ans quoi  ) on est un peu en retard, la compétition a lieu à la fin du mois, et donc on a pris un peu de retard sur le plan de communication =)
) on est un peu en retard, la compétition a lieu à la fin du mois, et donc on a pris un peu de retard sur le plan de communication =)
Pour rappel le thème de la coupe de France de cette année 2025 est : " The show must go one " .
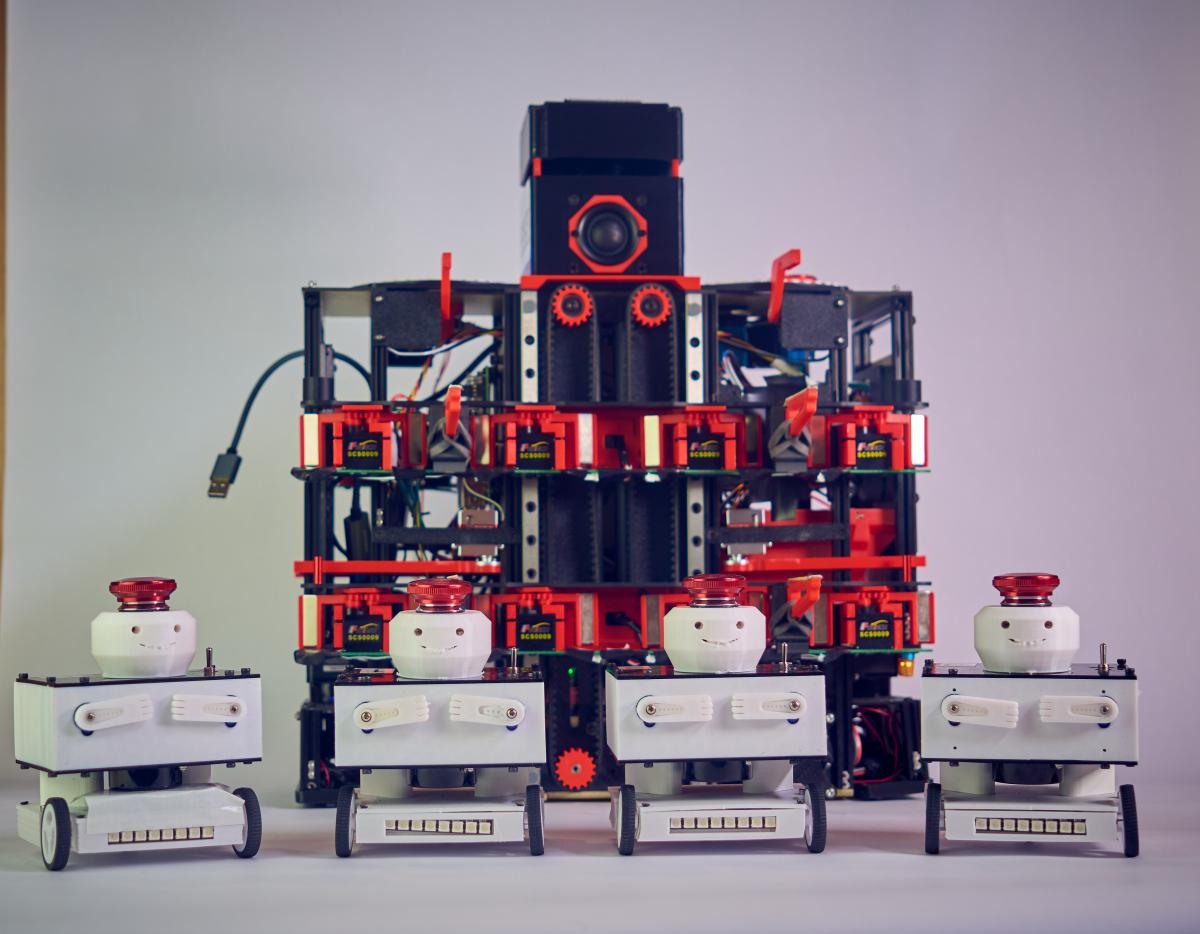
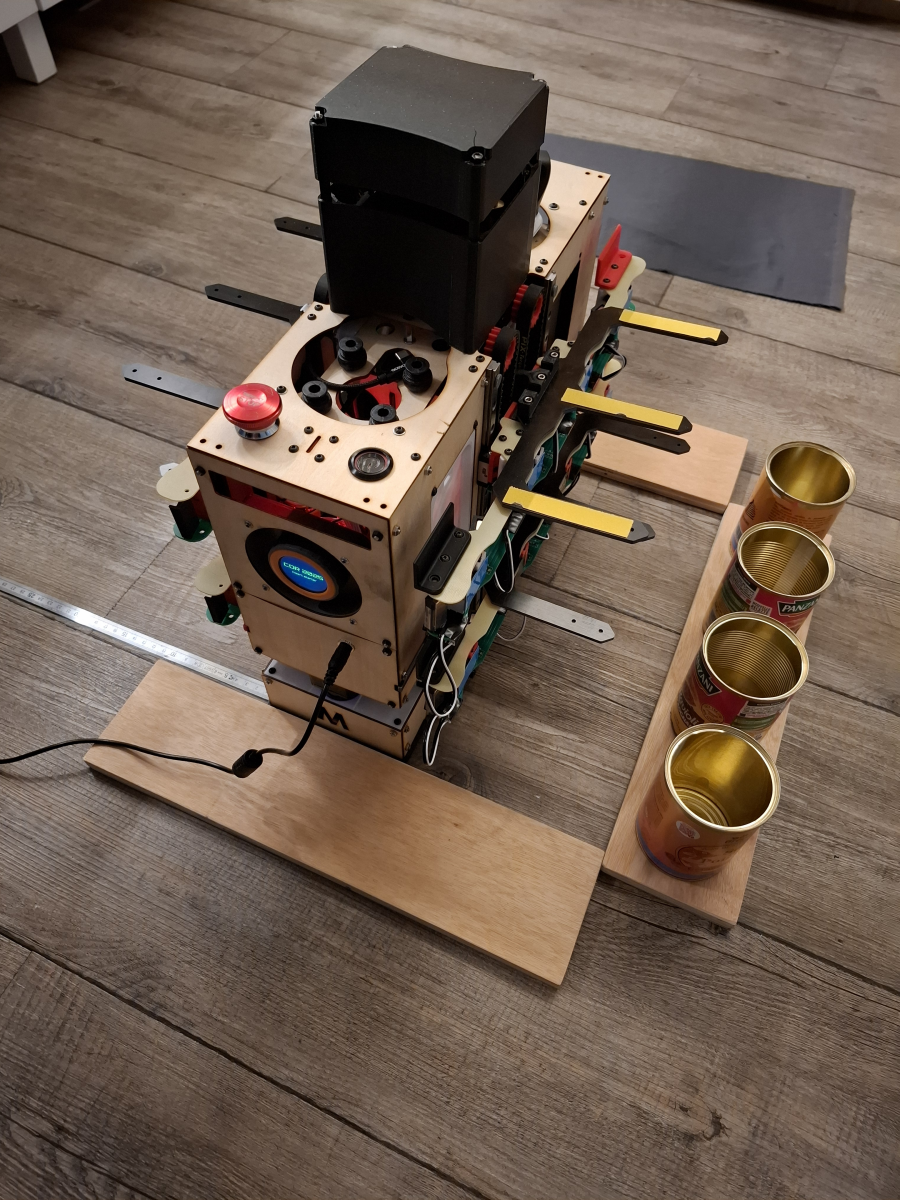
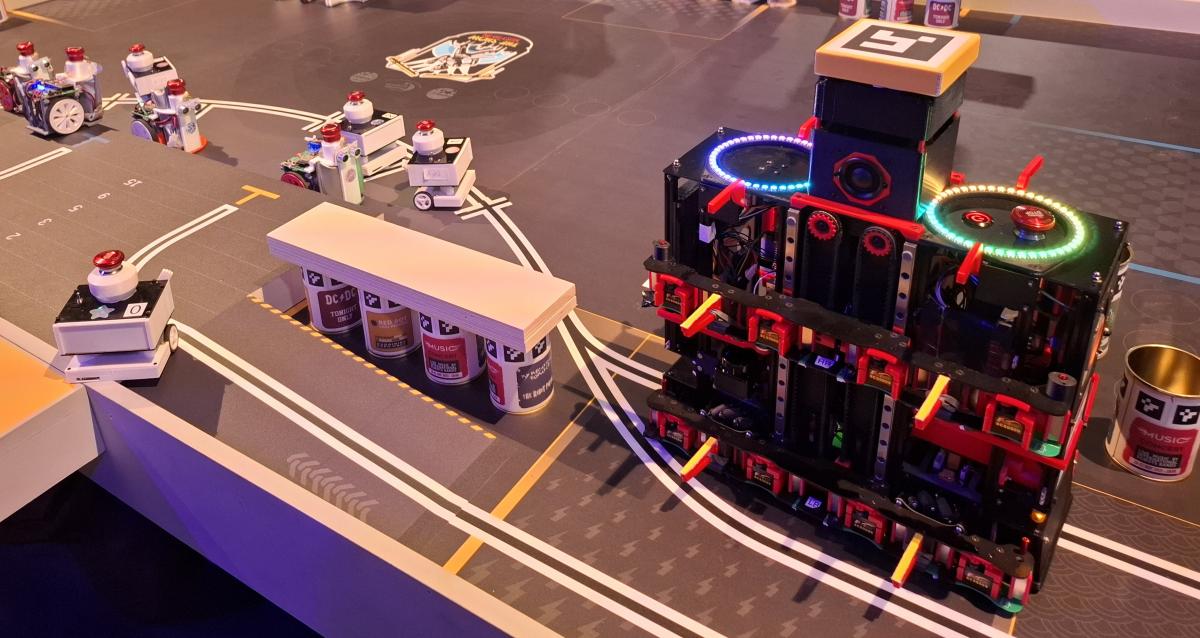
Dans les grandes lignes, nous devons réaliser un robot principale qui doit construire un maximum " d'estrade " composées de boite de conserve (vide) et de planche de bois et poser une banderole, ainsi que des petits robots indépendant, dont une "rockstar " qui doit aller sur scène et des groupies pour l'encenser =).
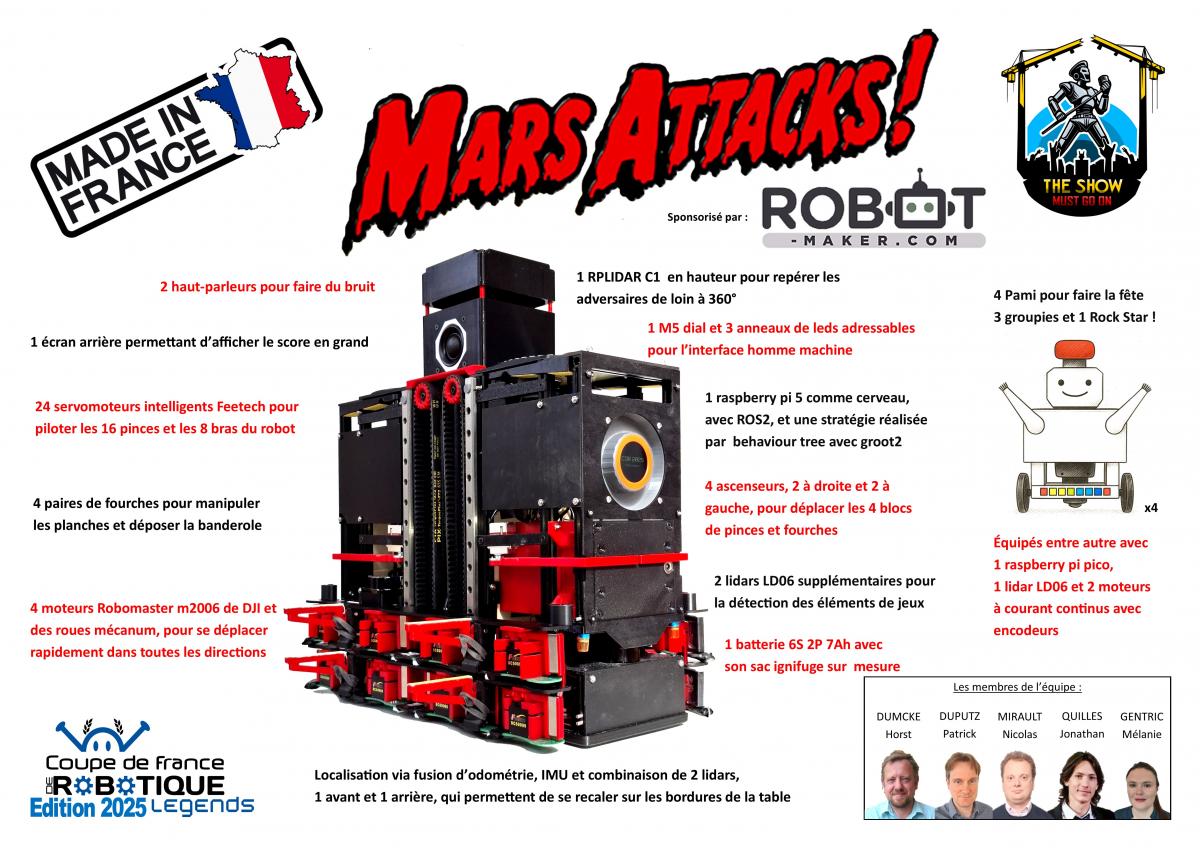
Mais voici notre poster technique qui présente le robot :
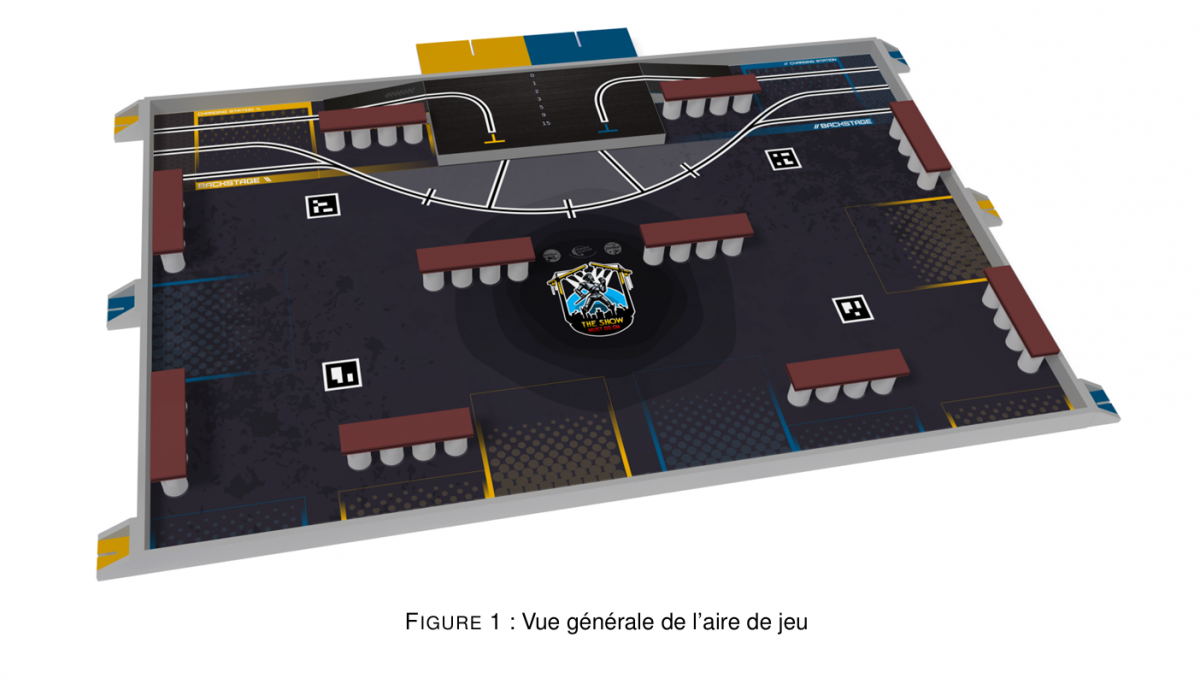
Voici à quoi ressemble la table de jeu :
Et voici un lien pour télécharger le règlement complet pour ceux que ça intéresse =)
 Eurobot2025_Rules.pdf 2,74 Mo
54 téléchargement(s)
Eurobot2025_Rules.pdf 2,74 Mo
54 téléchargement(s)
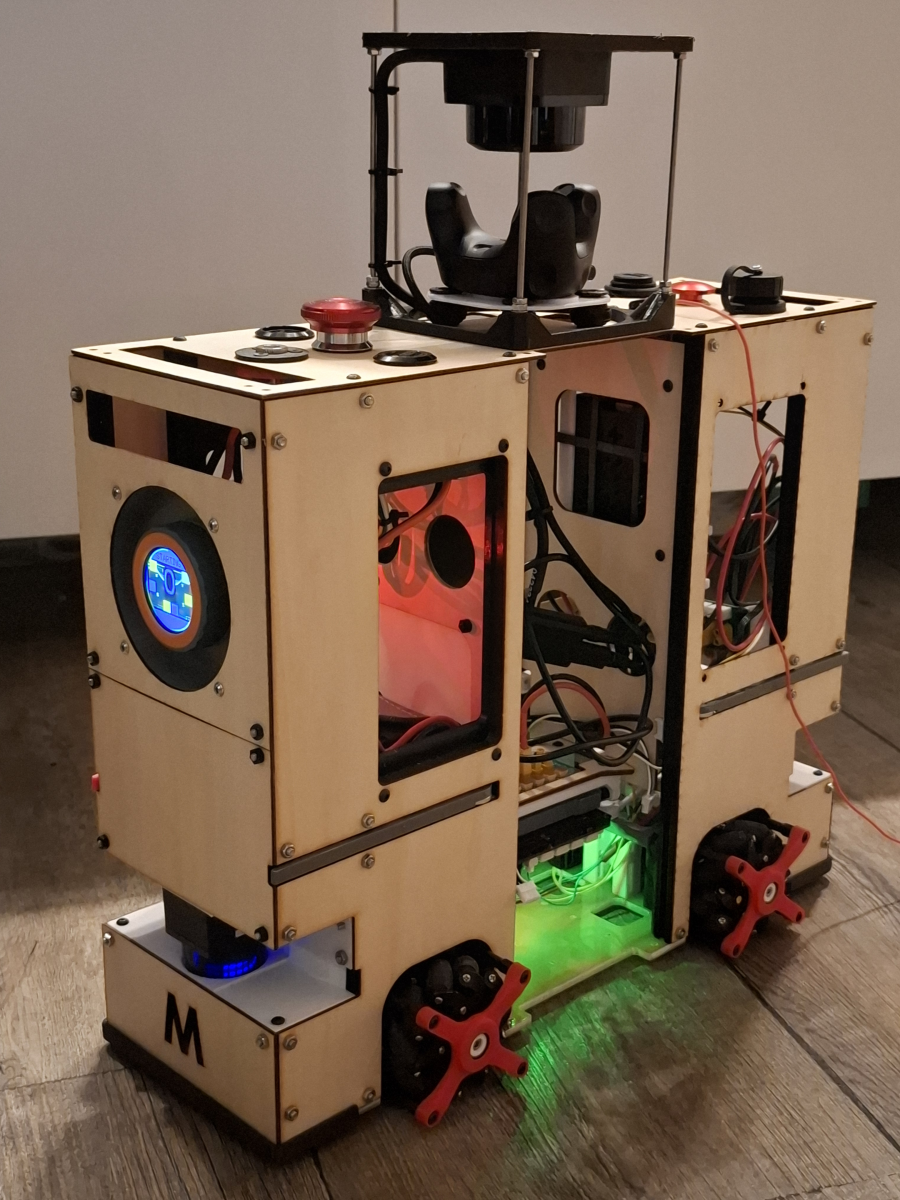
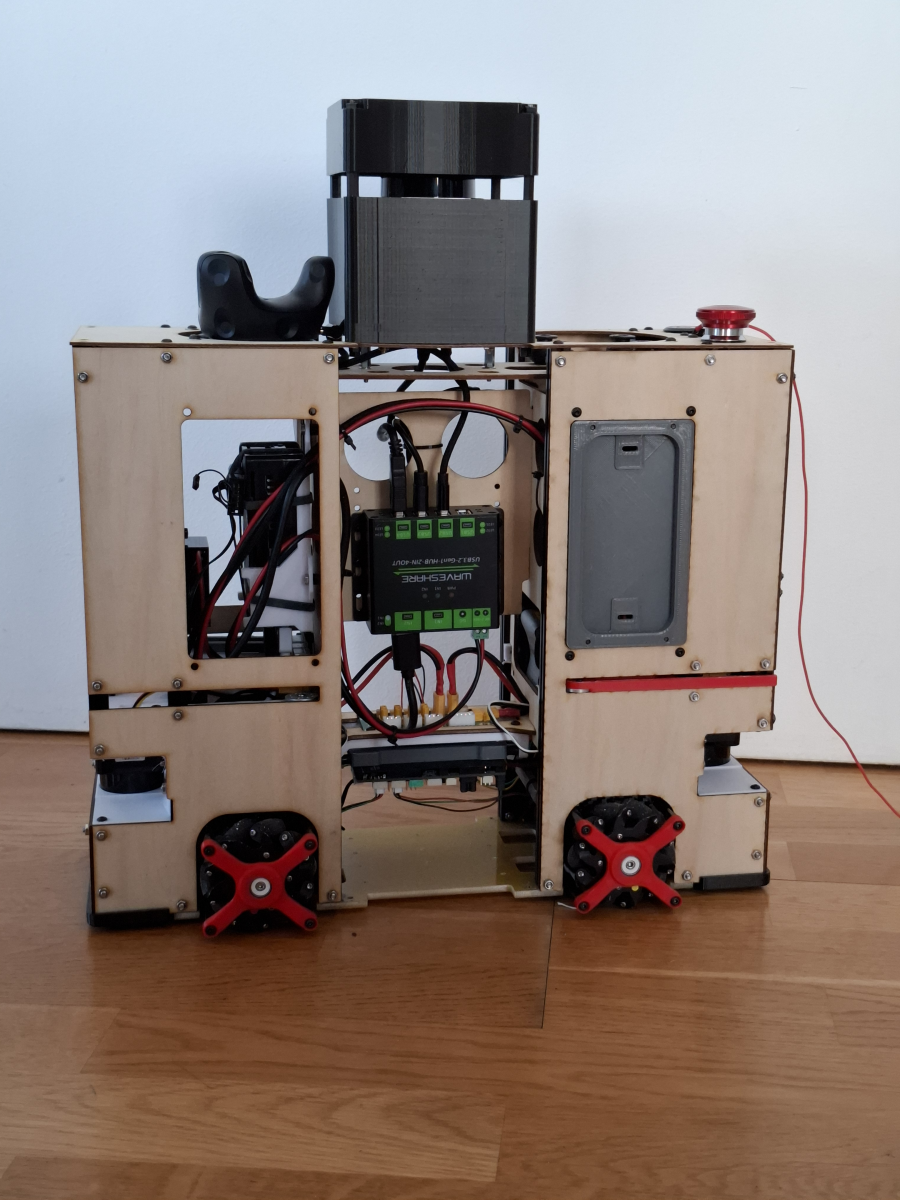
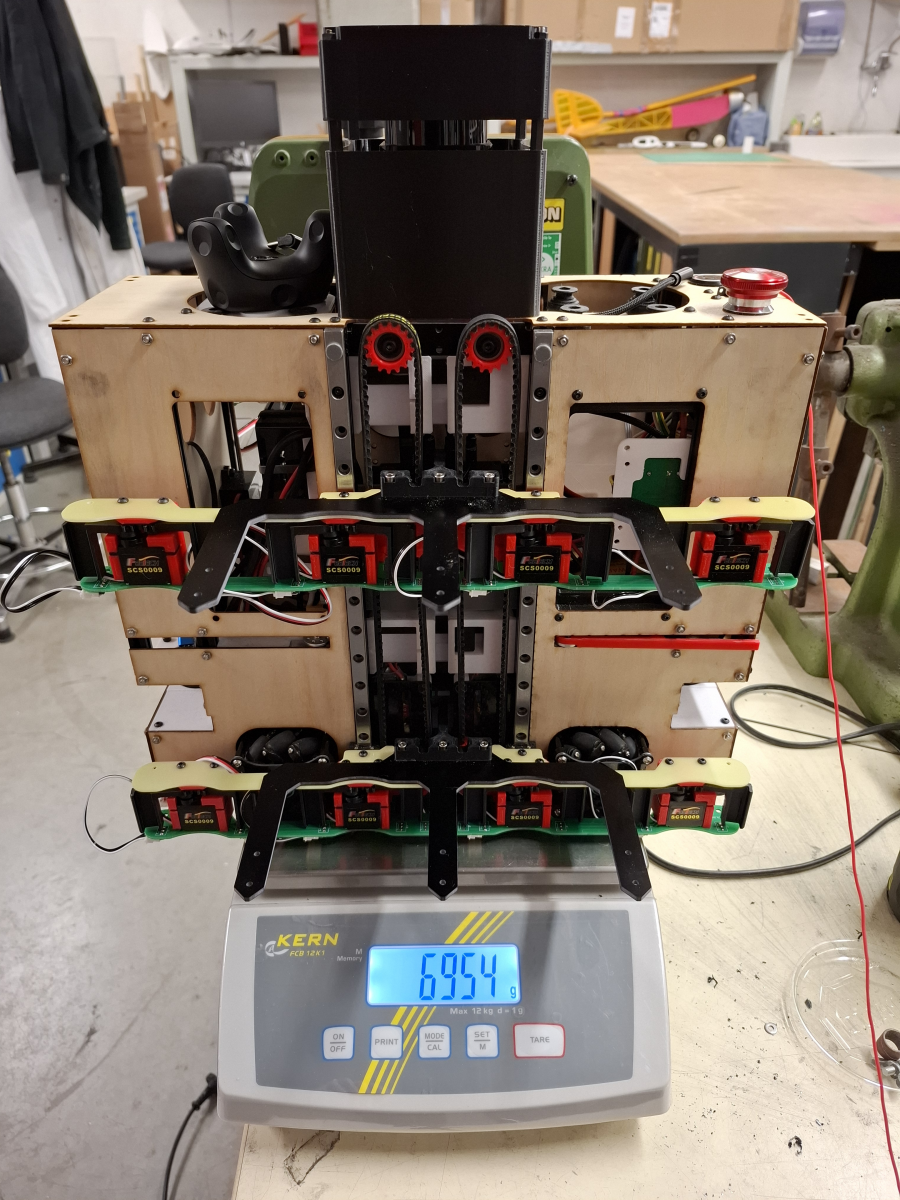
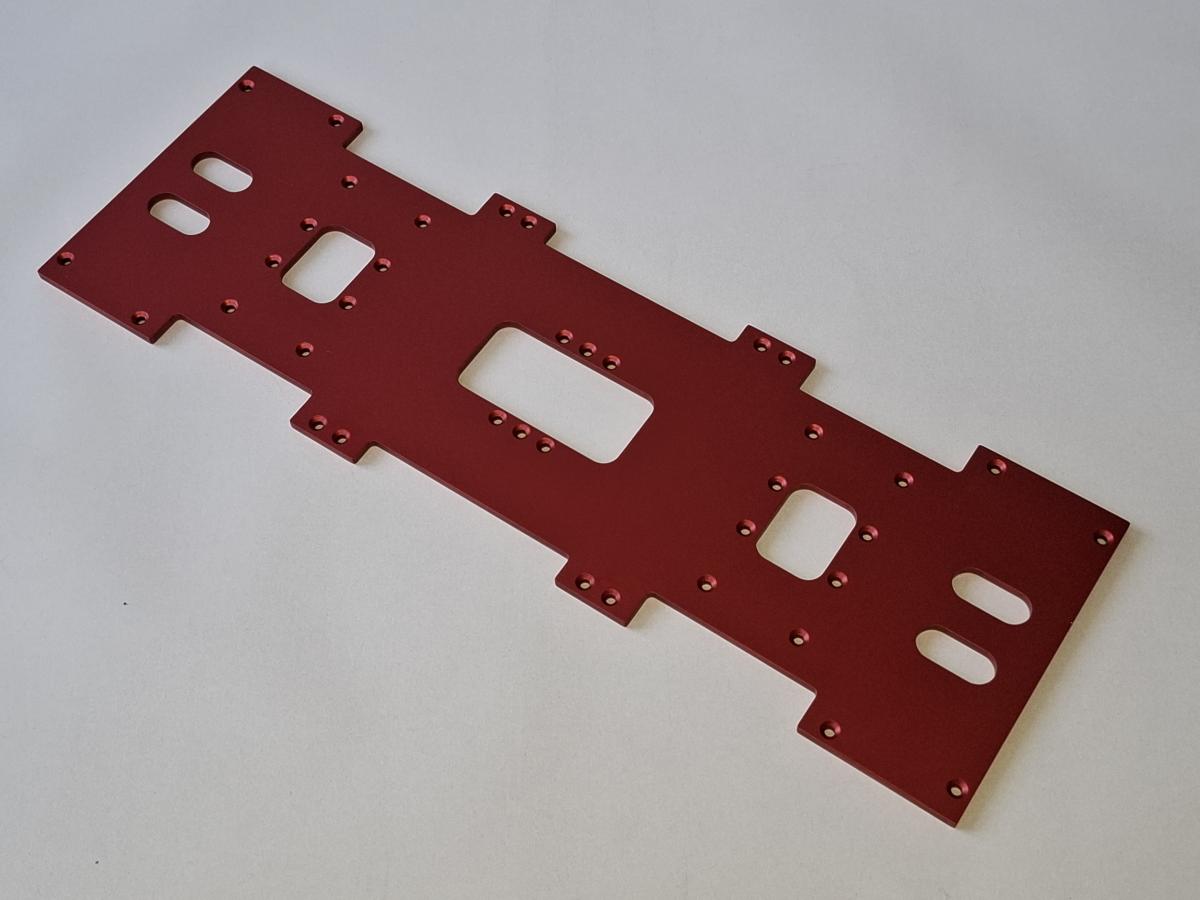
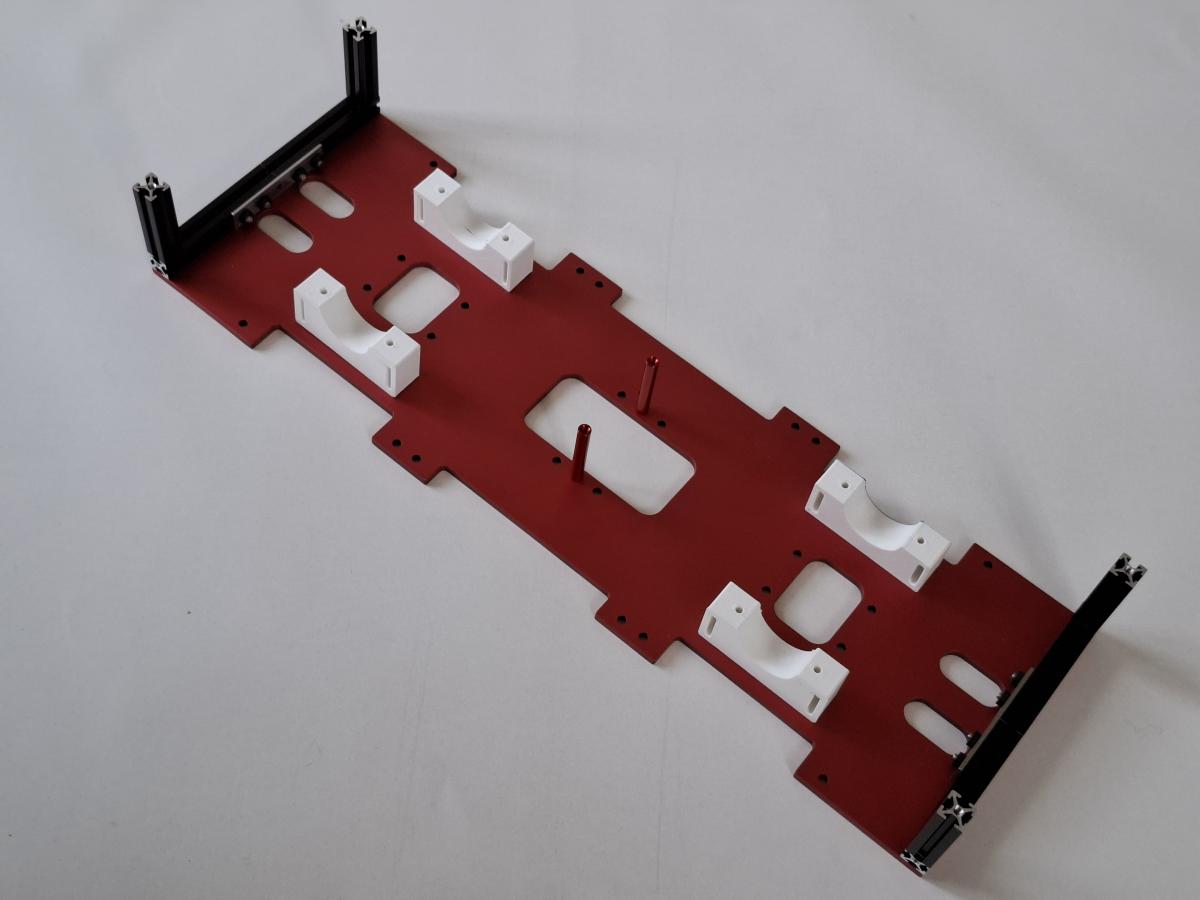
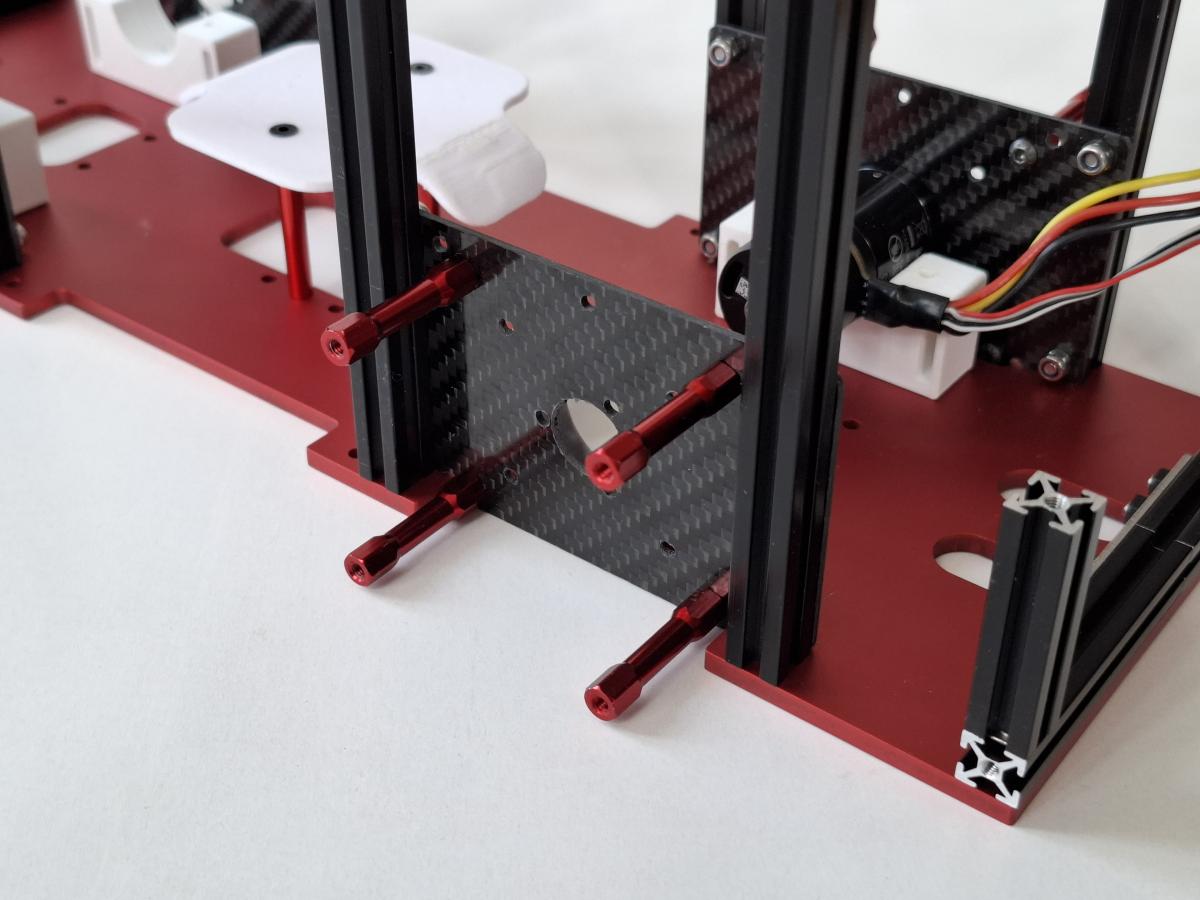
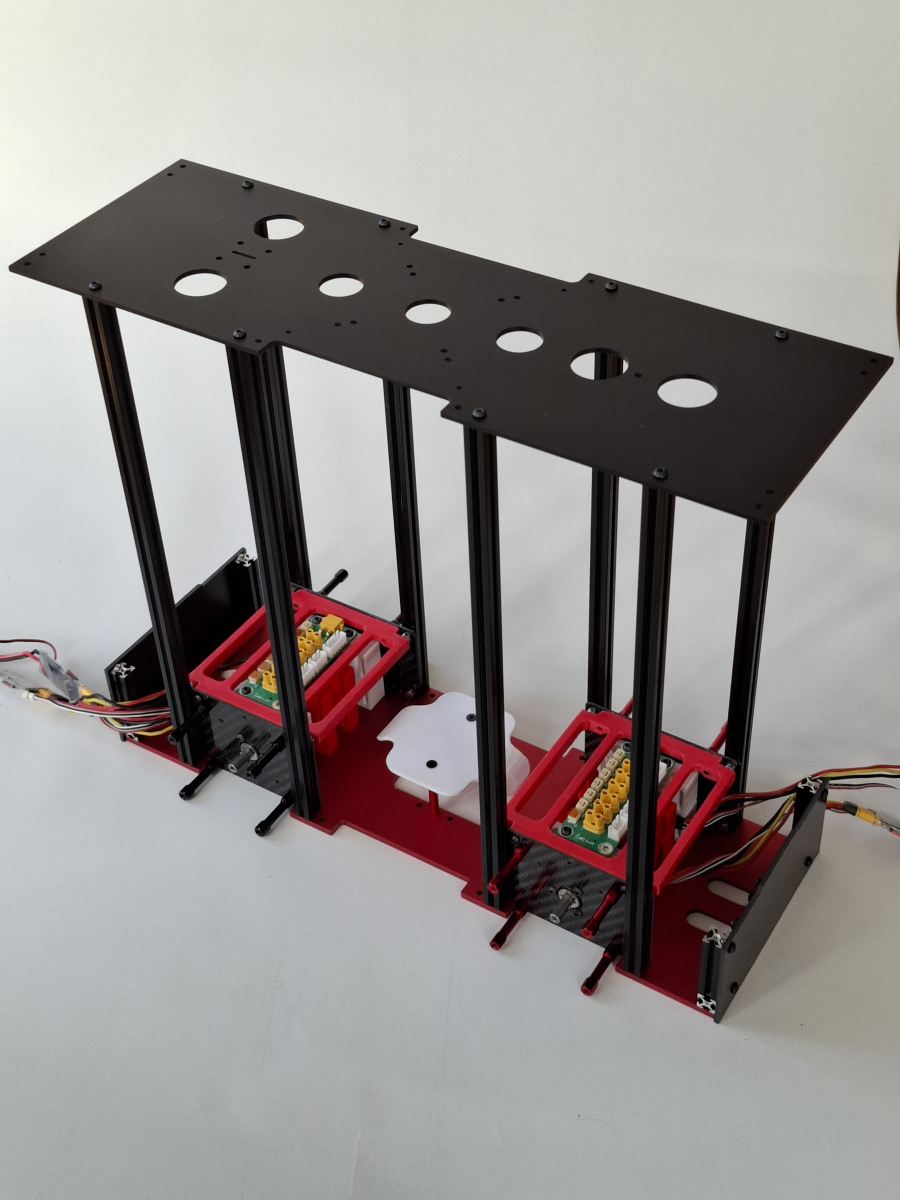
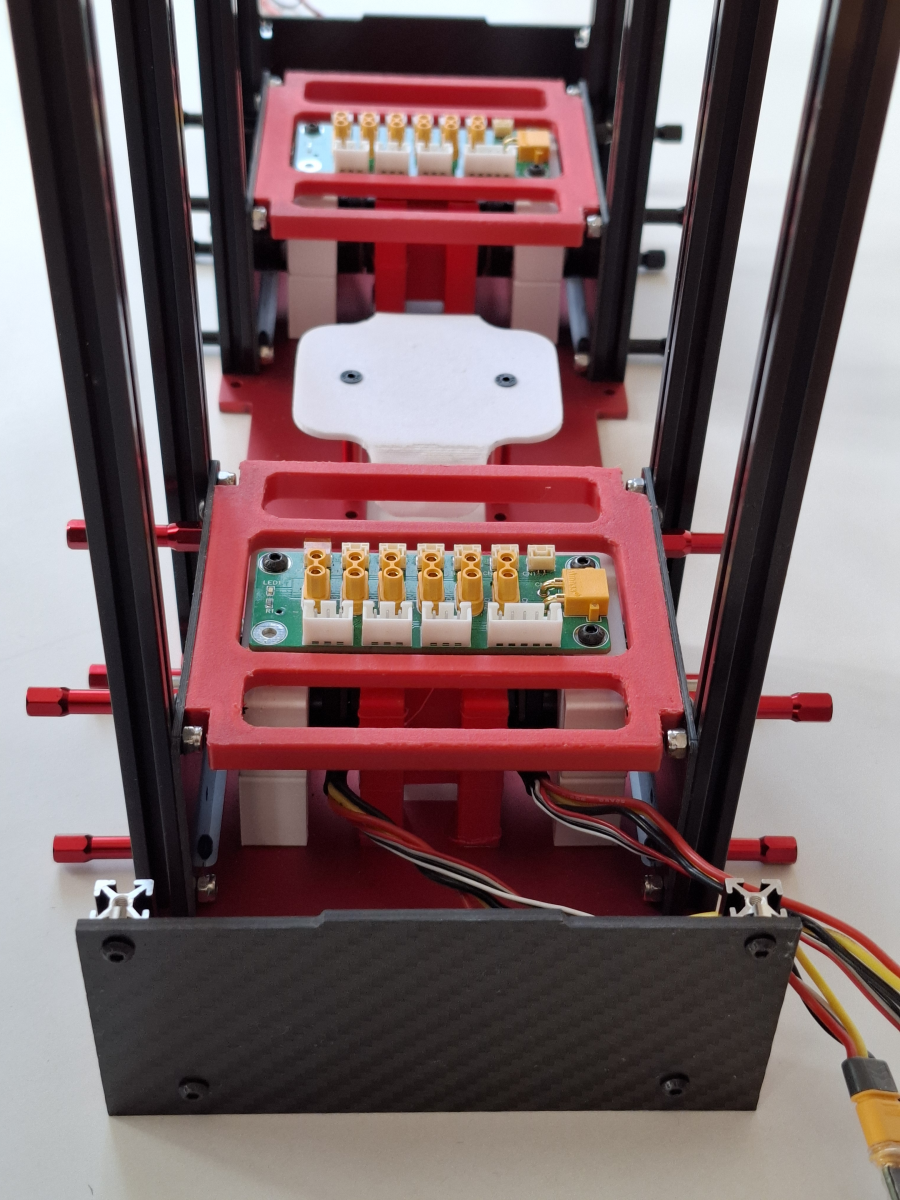
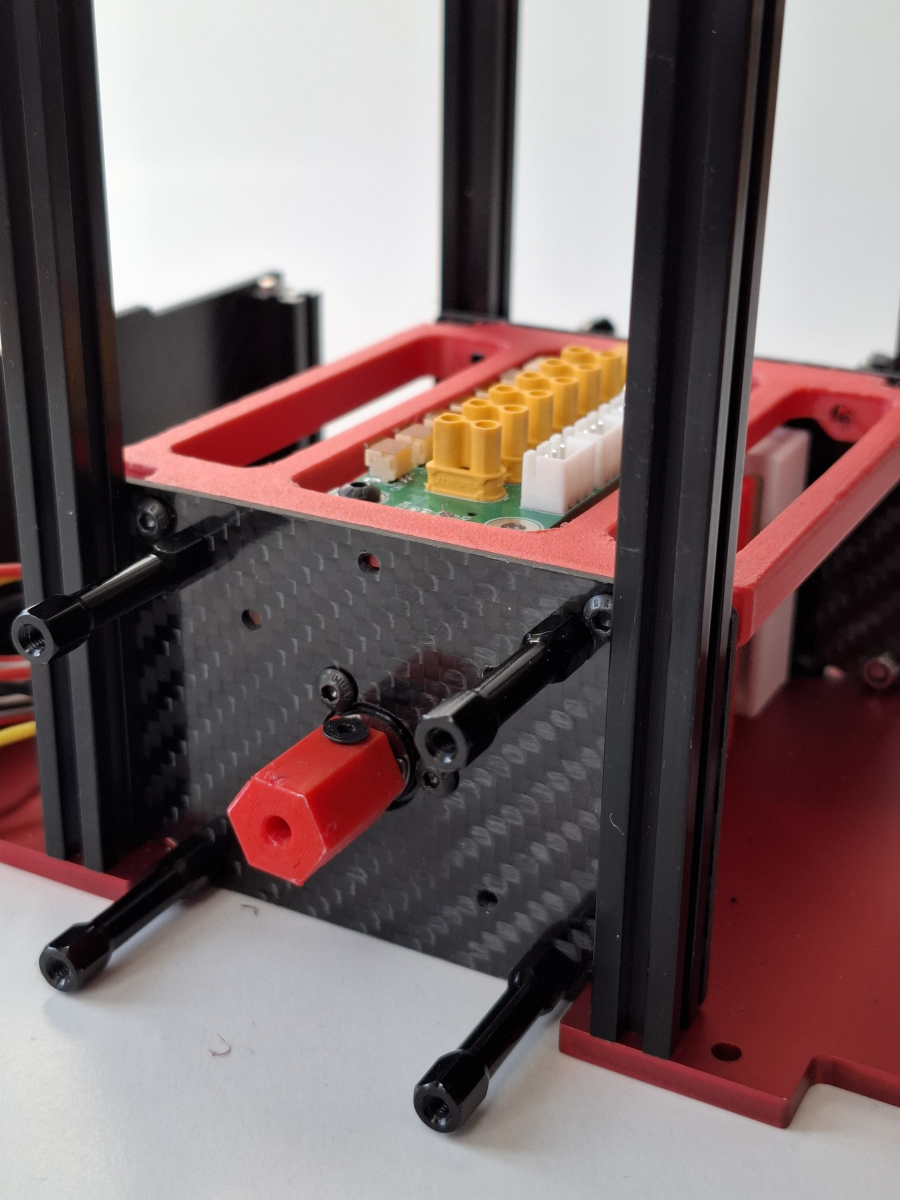
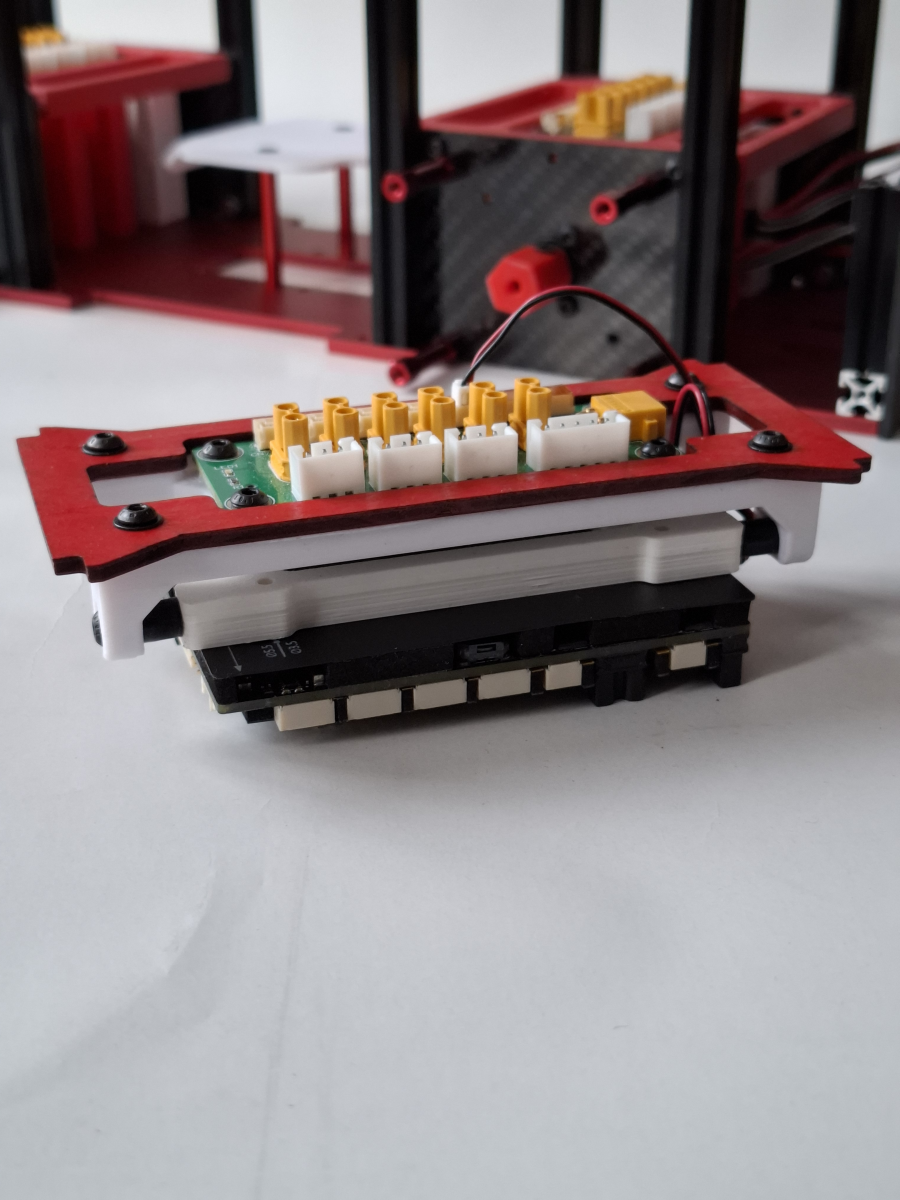
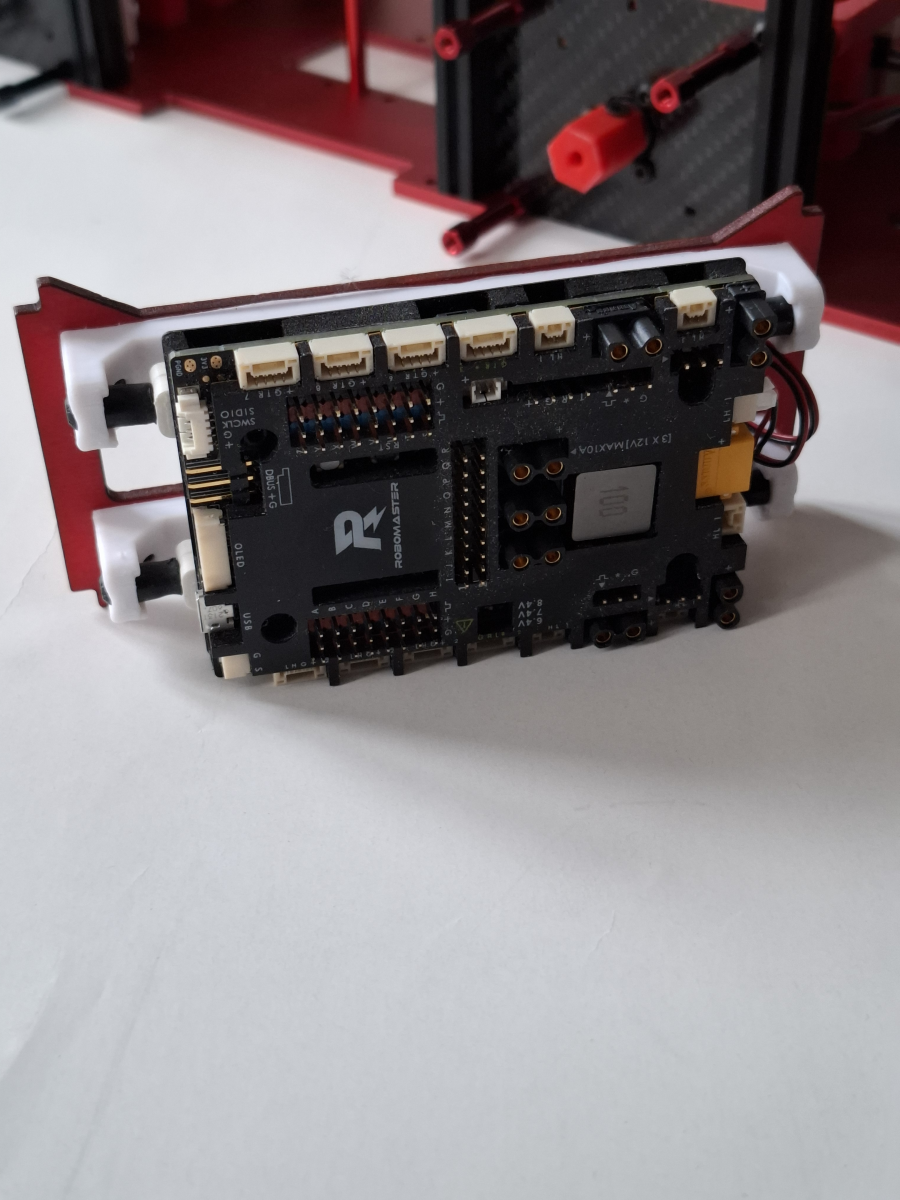
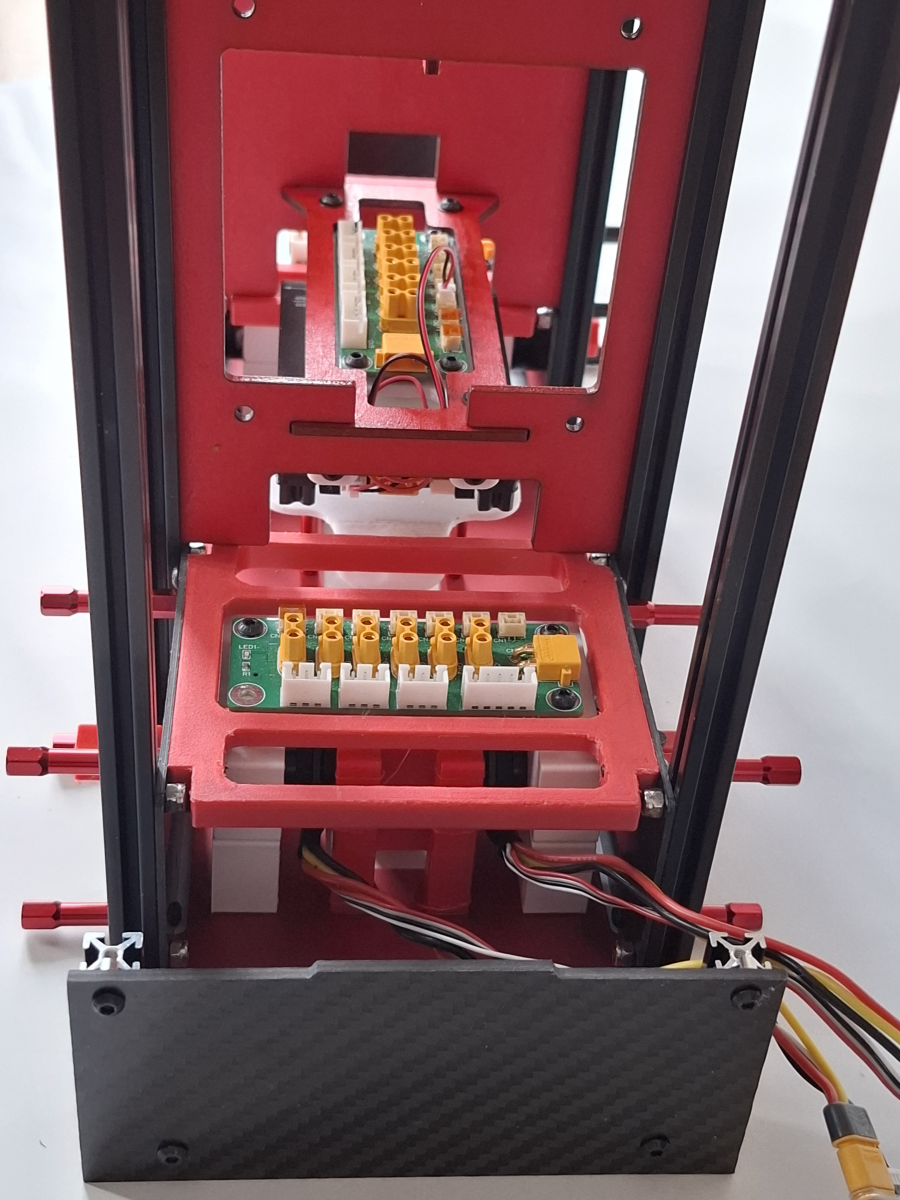
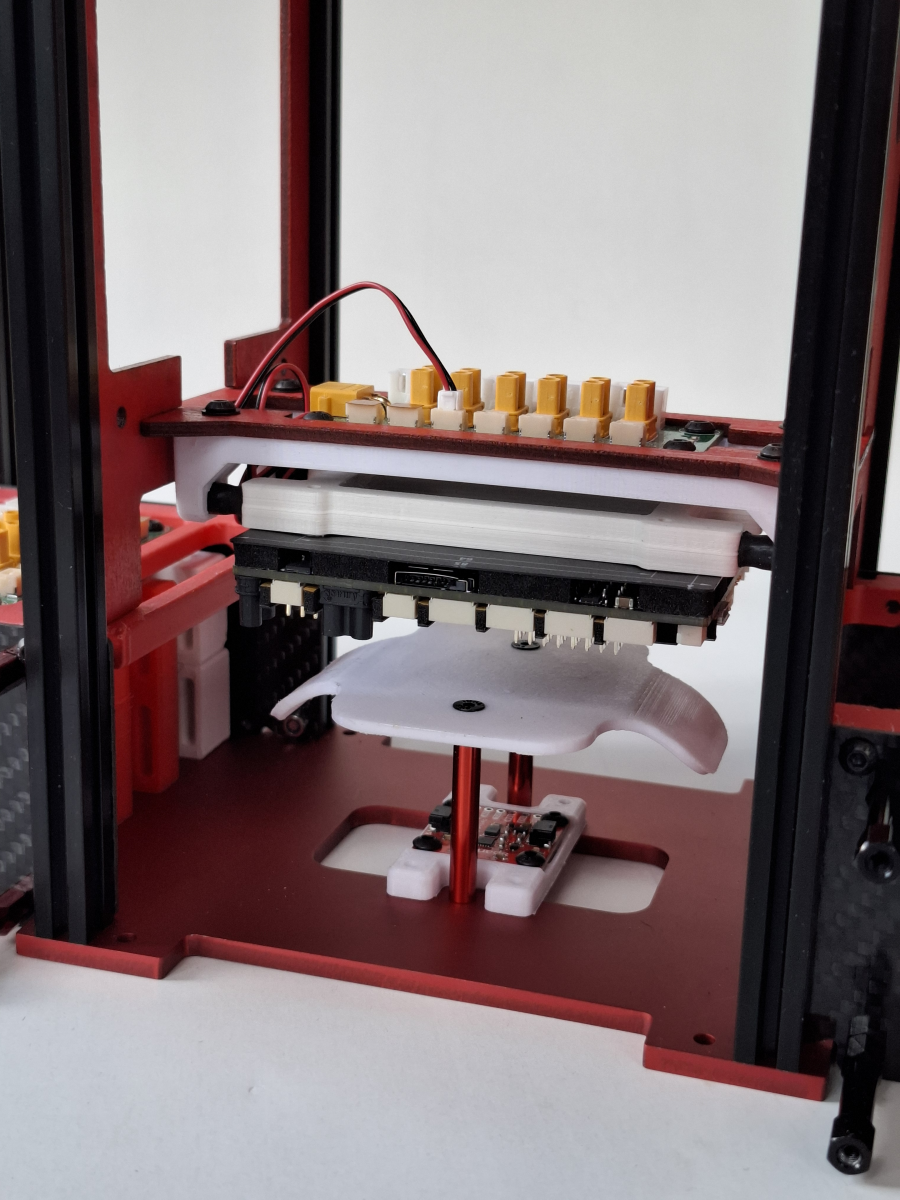
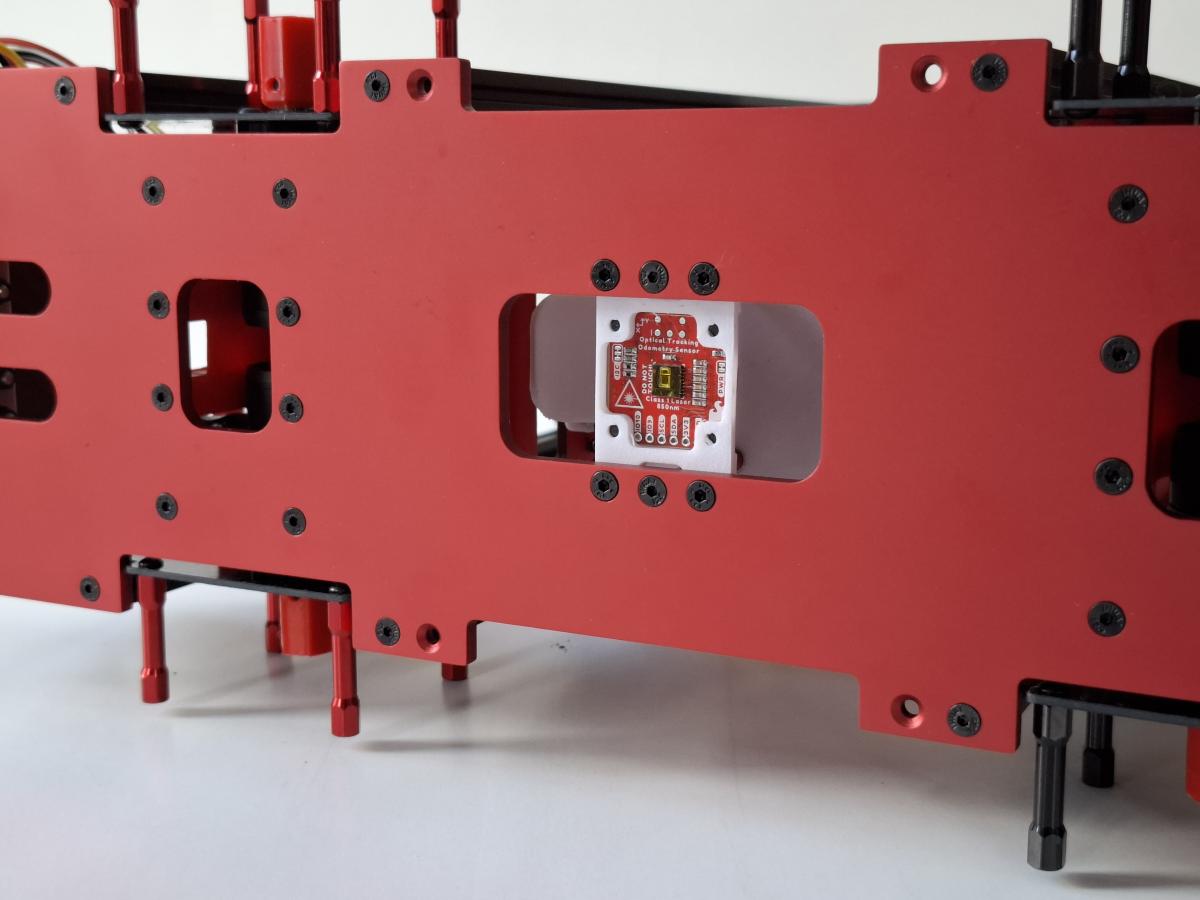
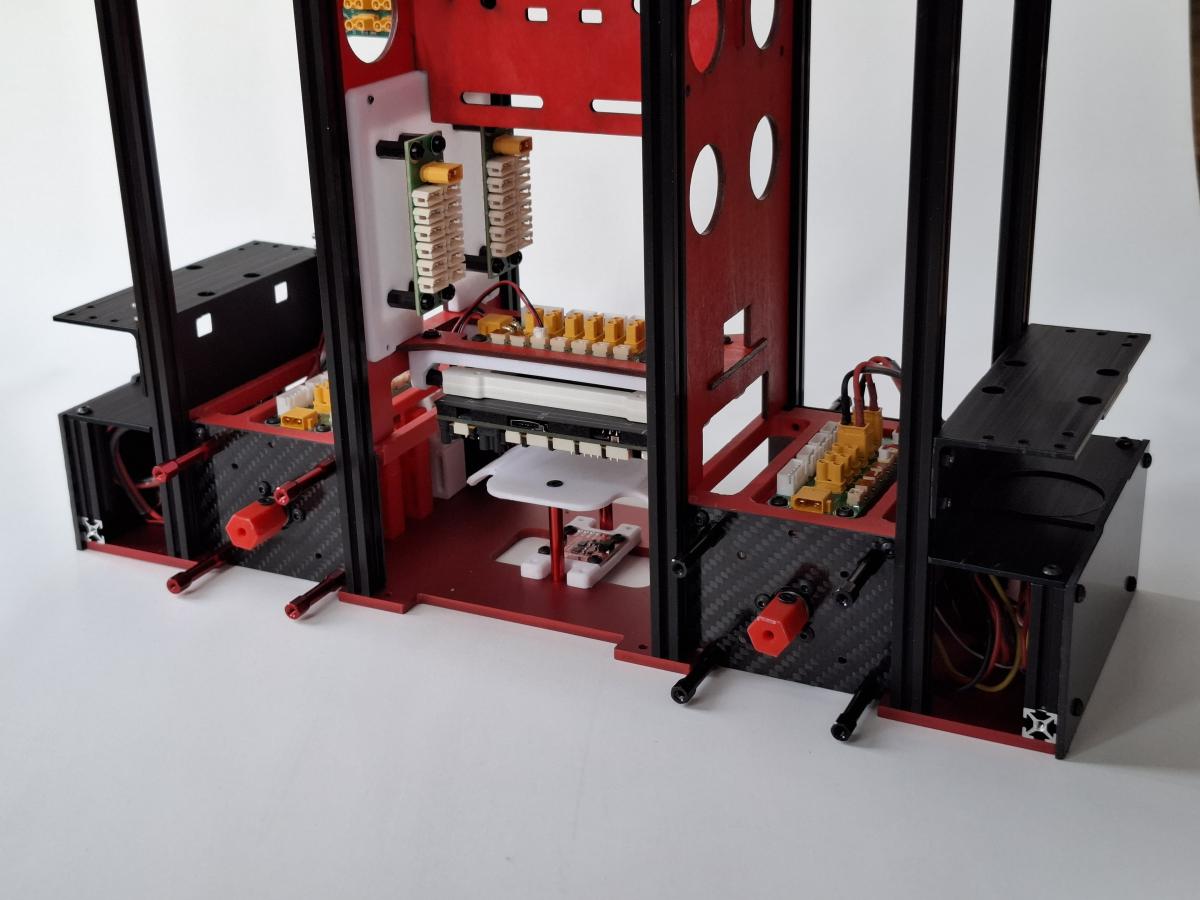
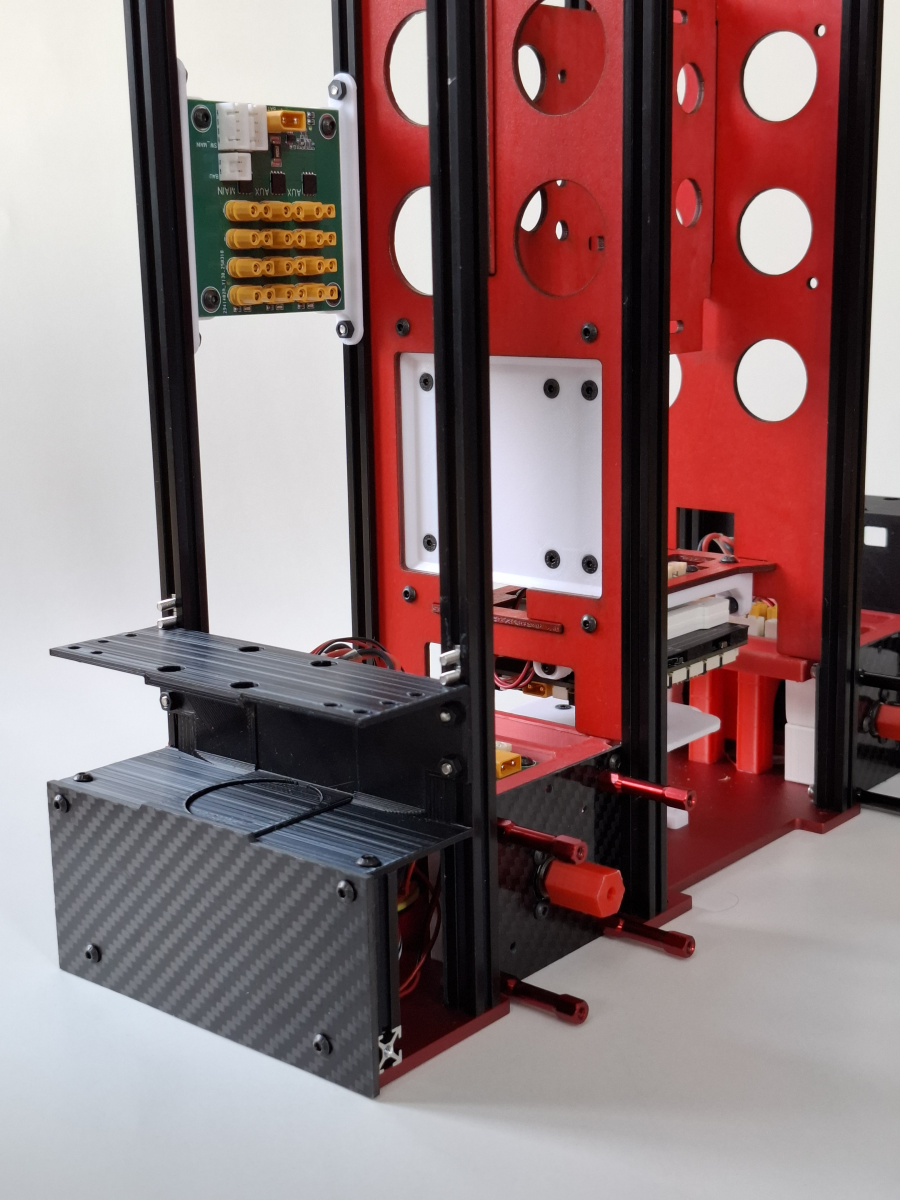
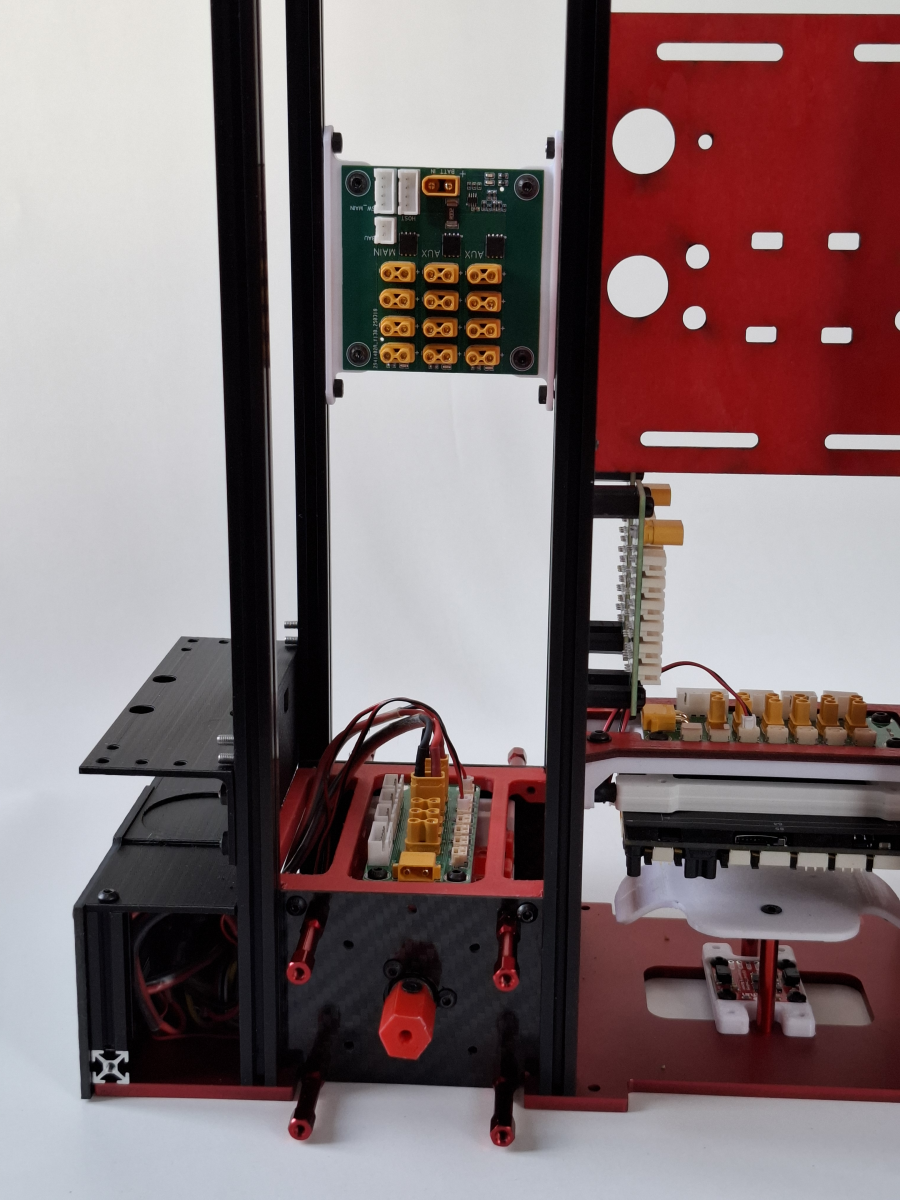
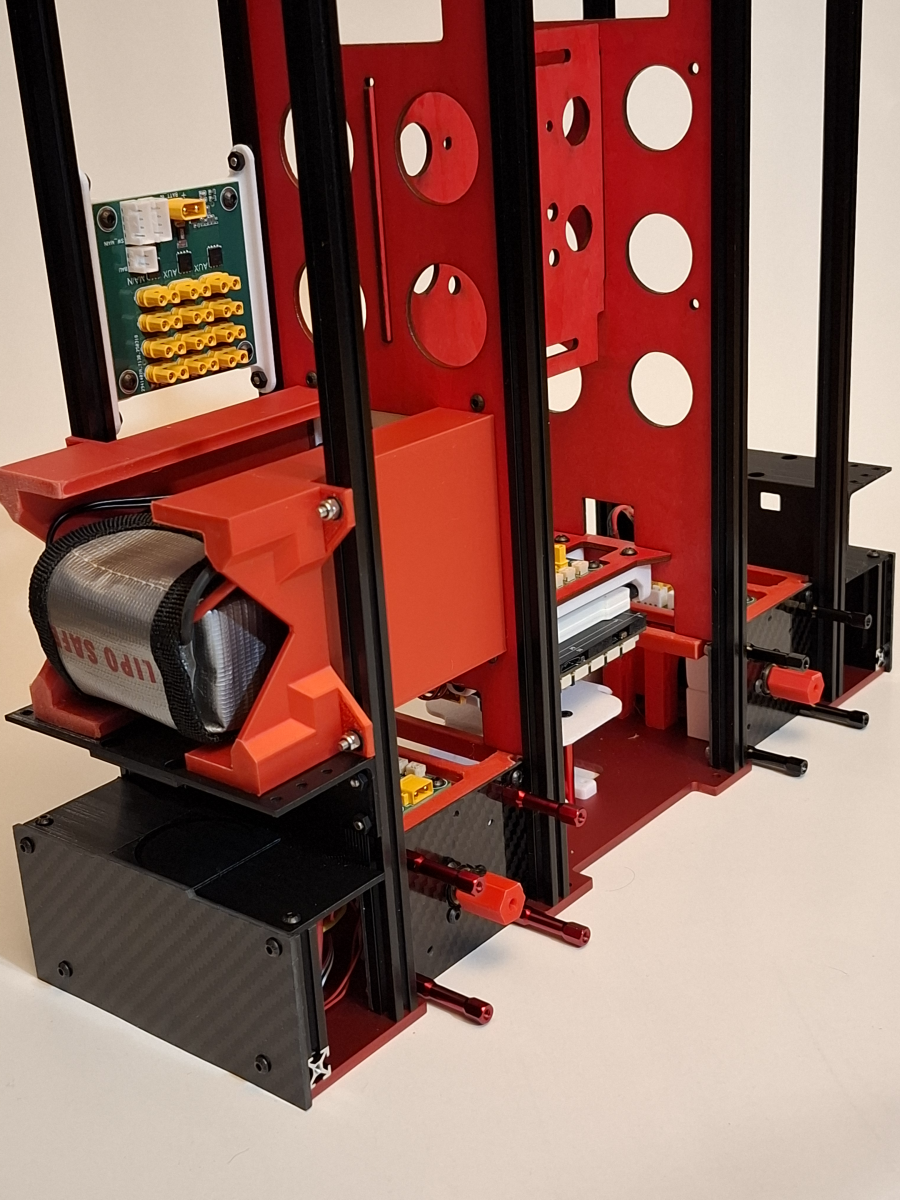
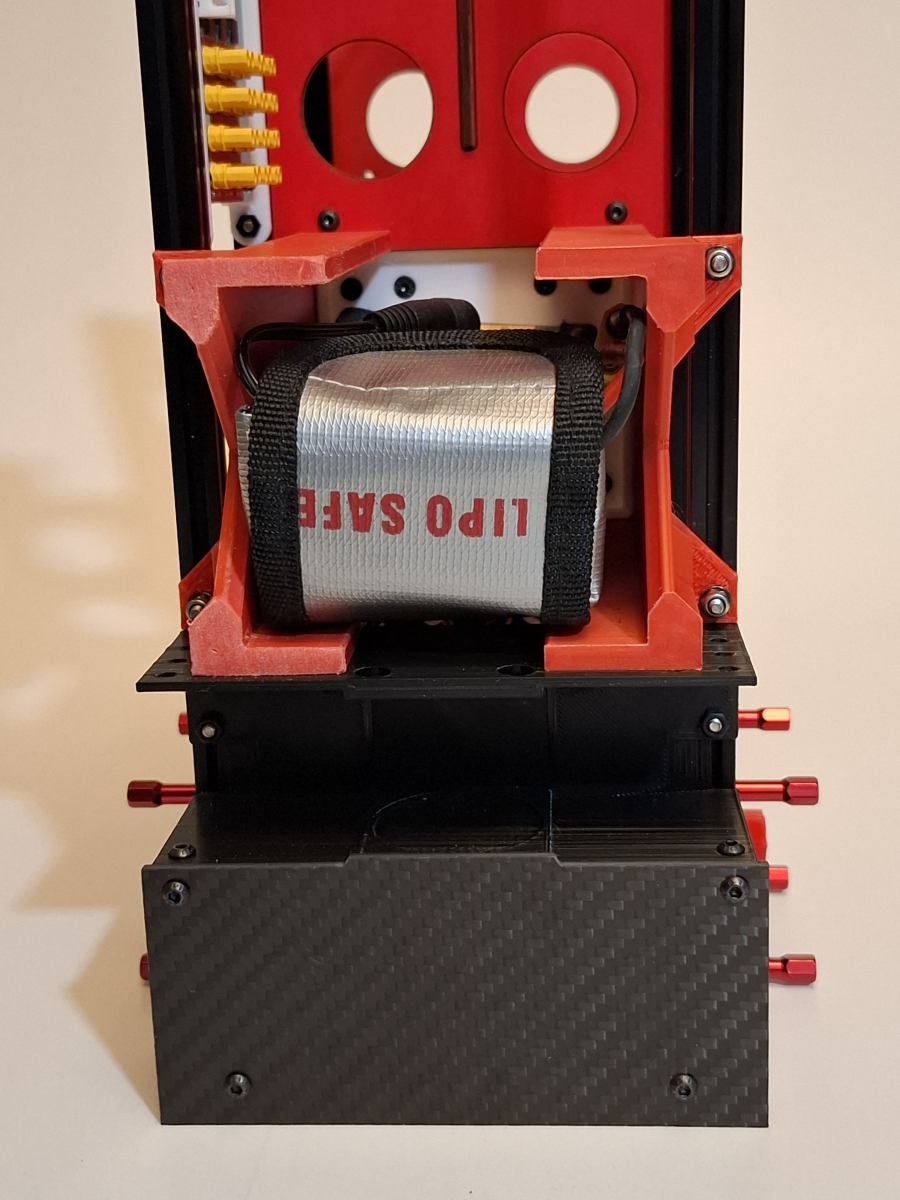
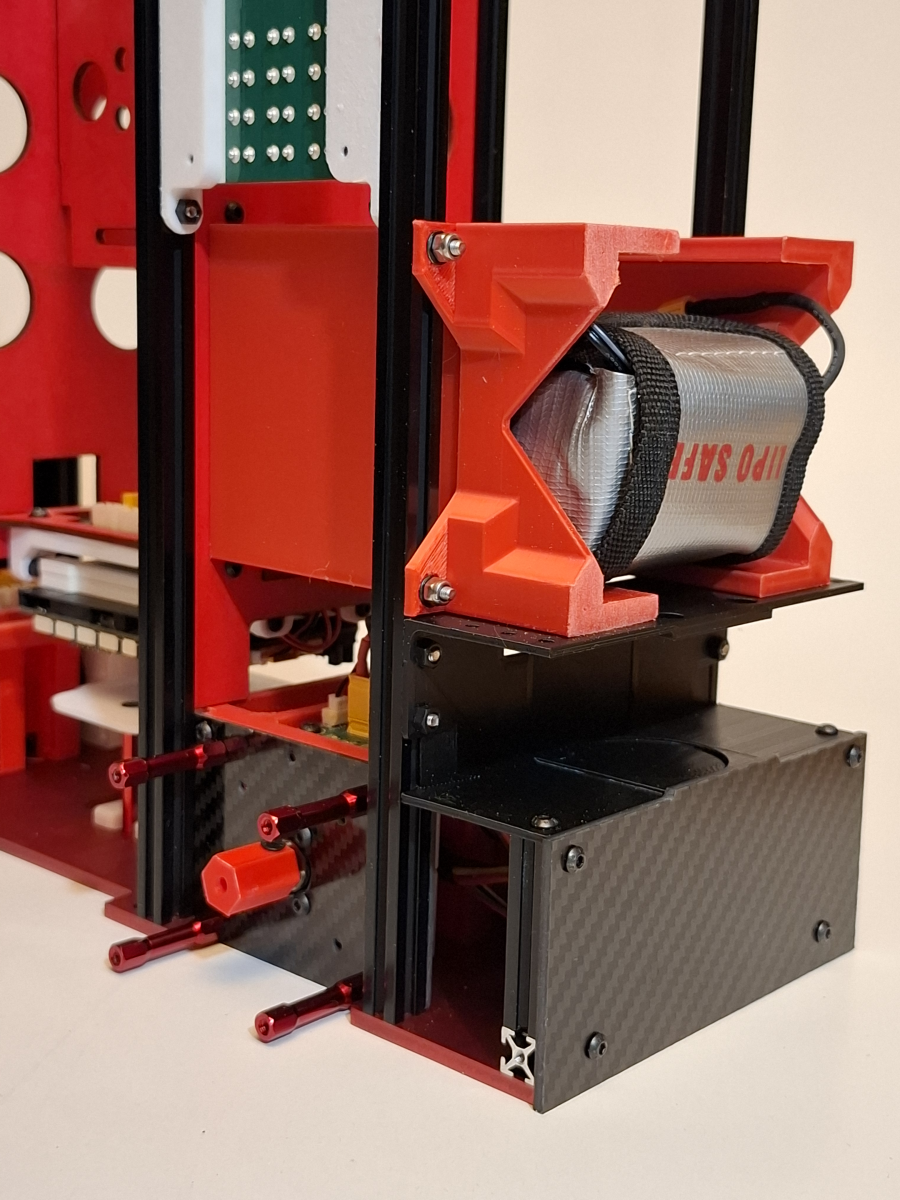
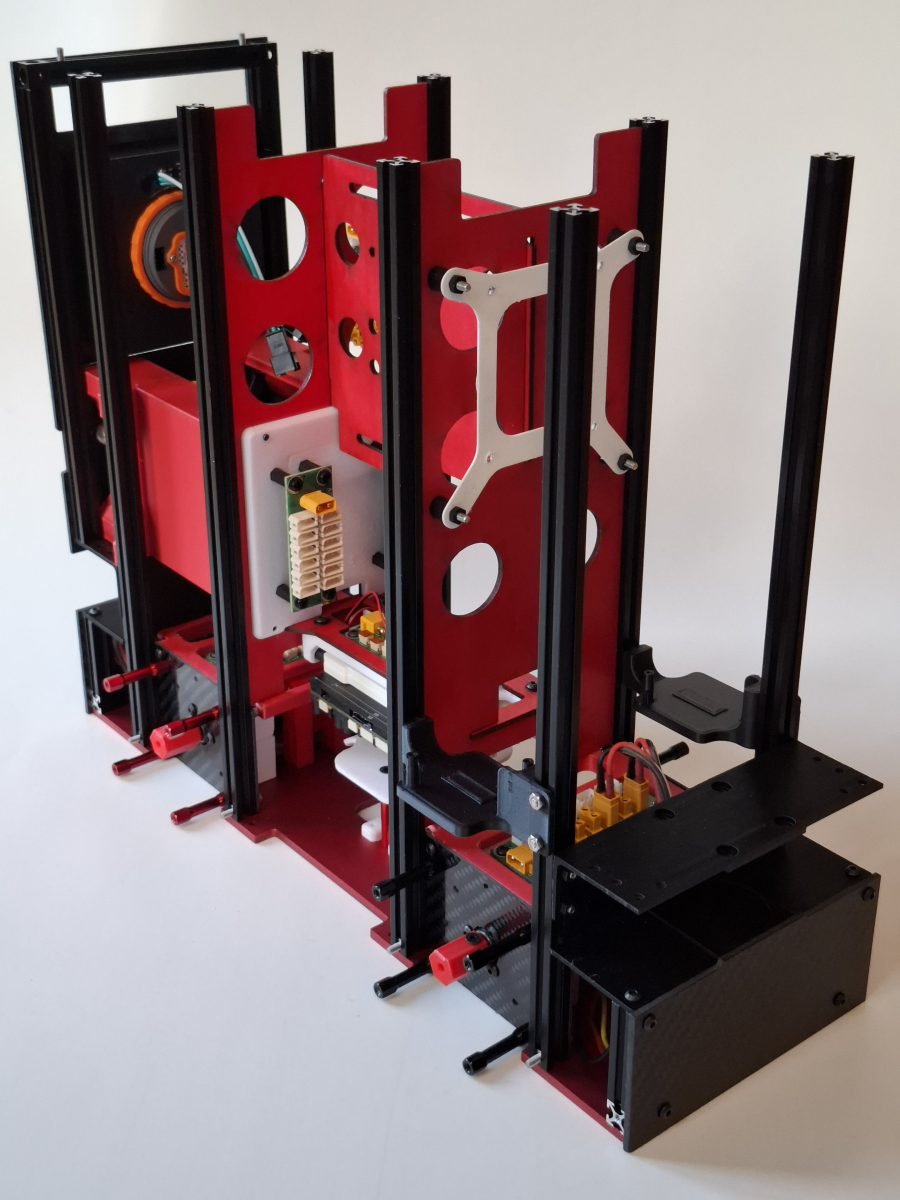
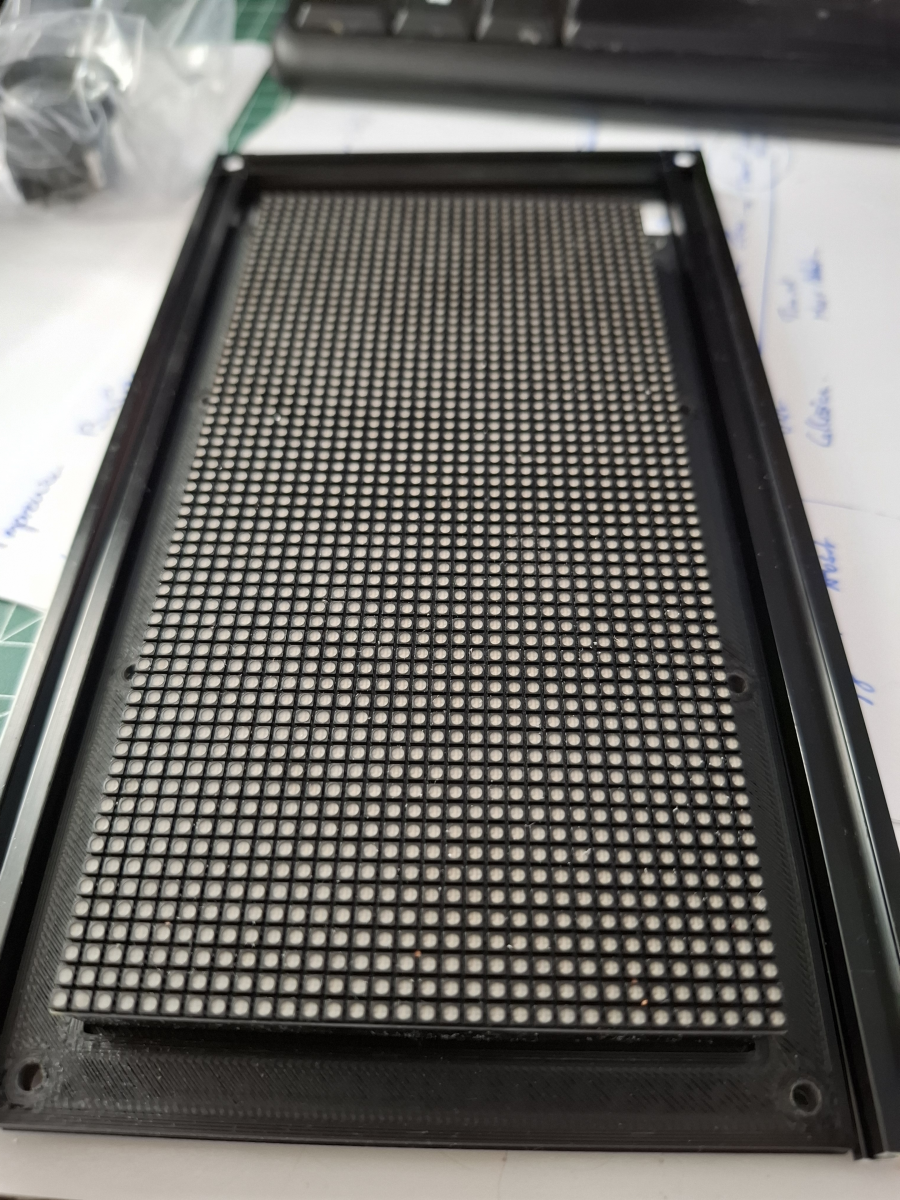
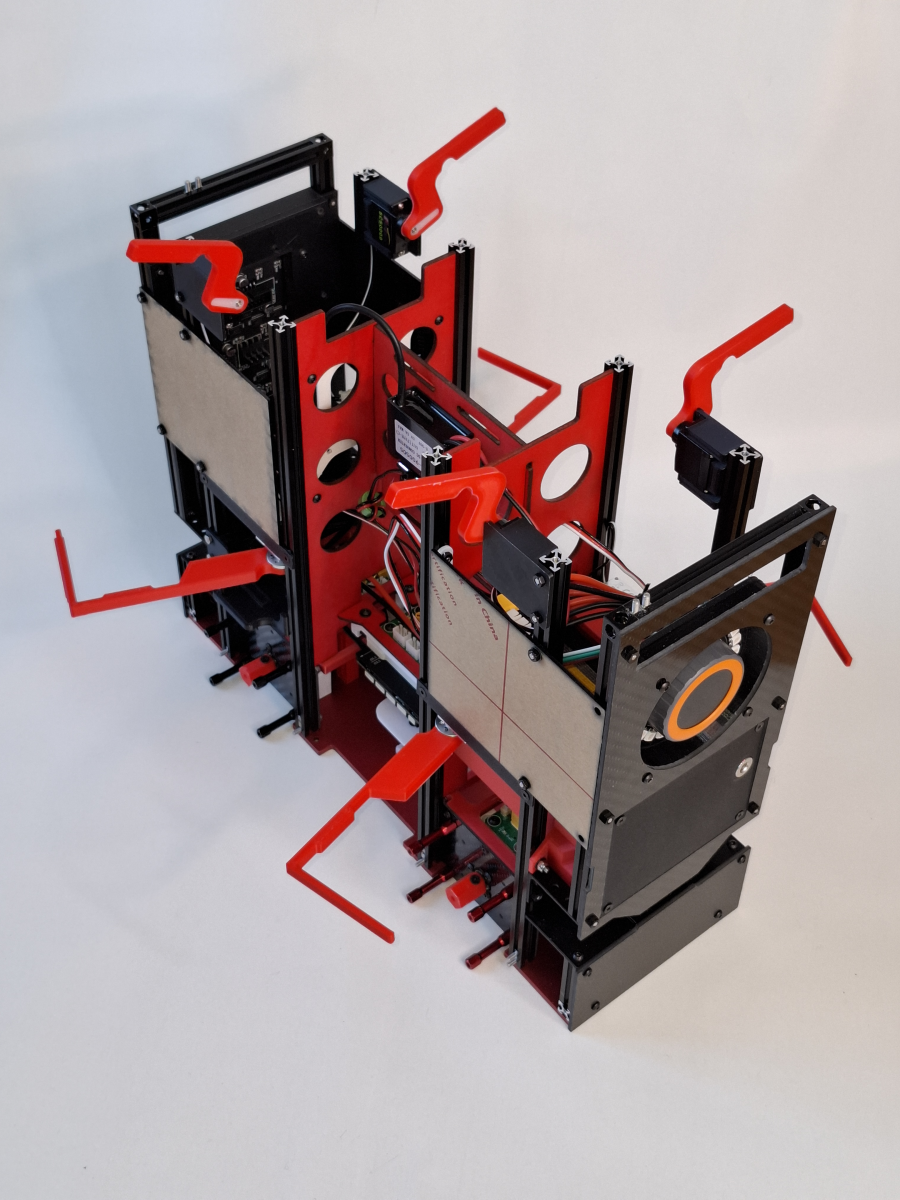
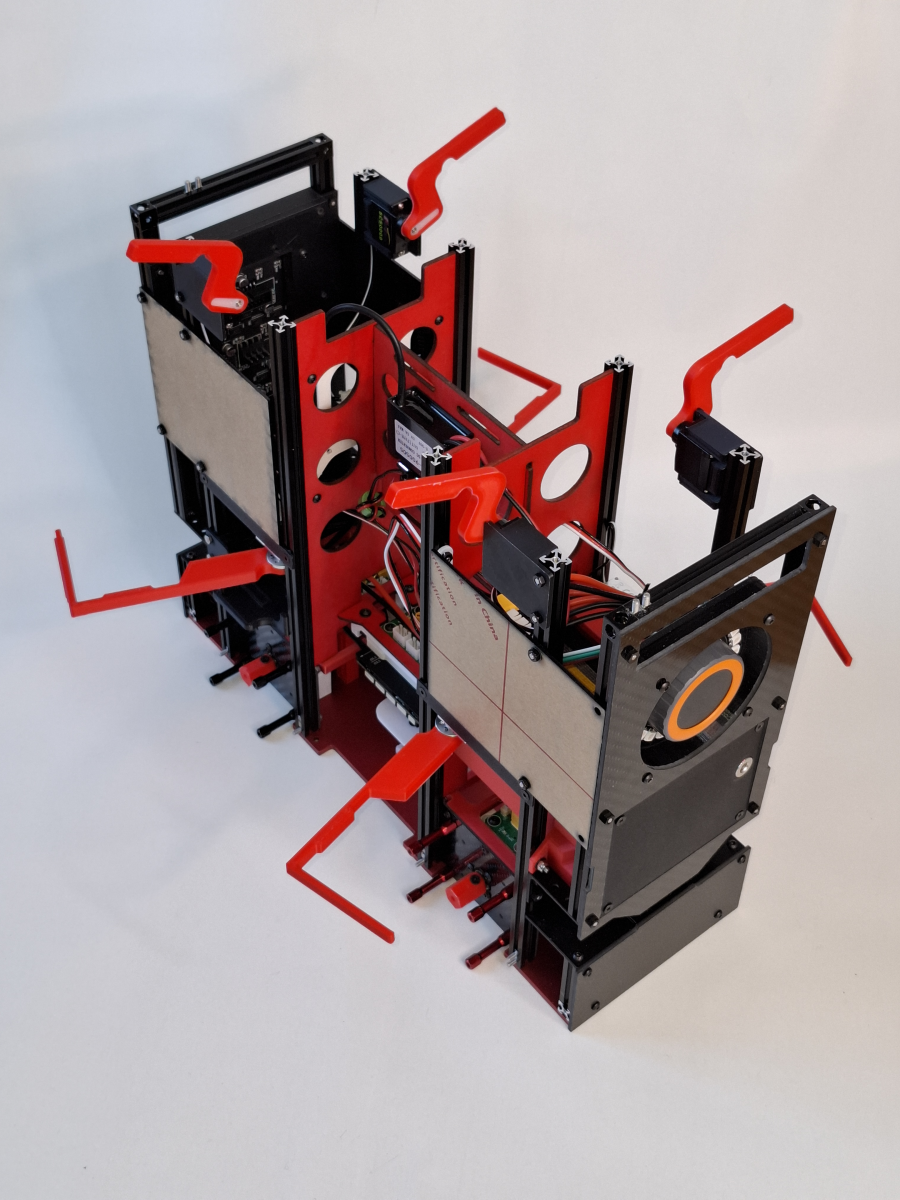
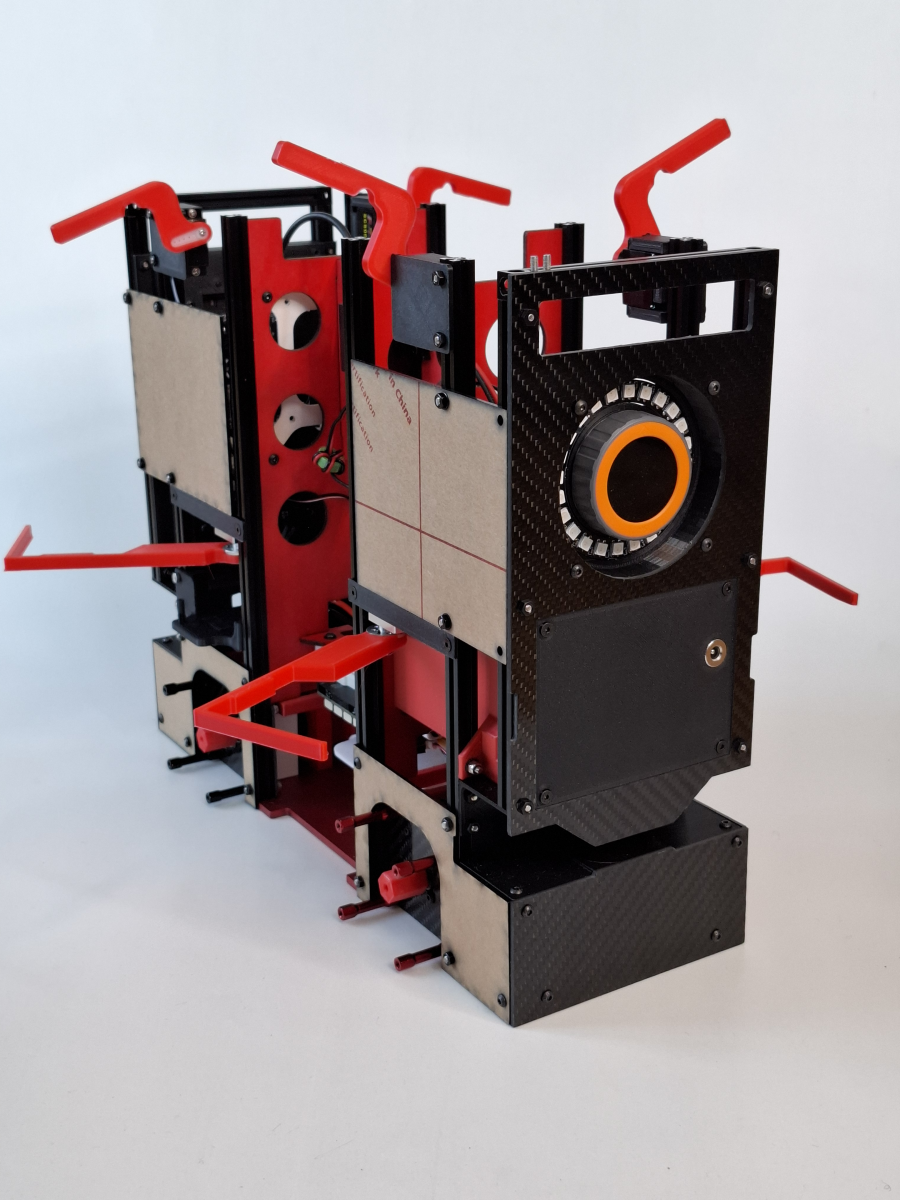
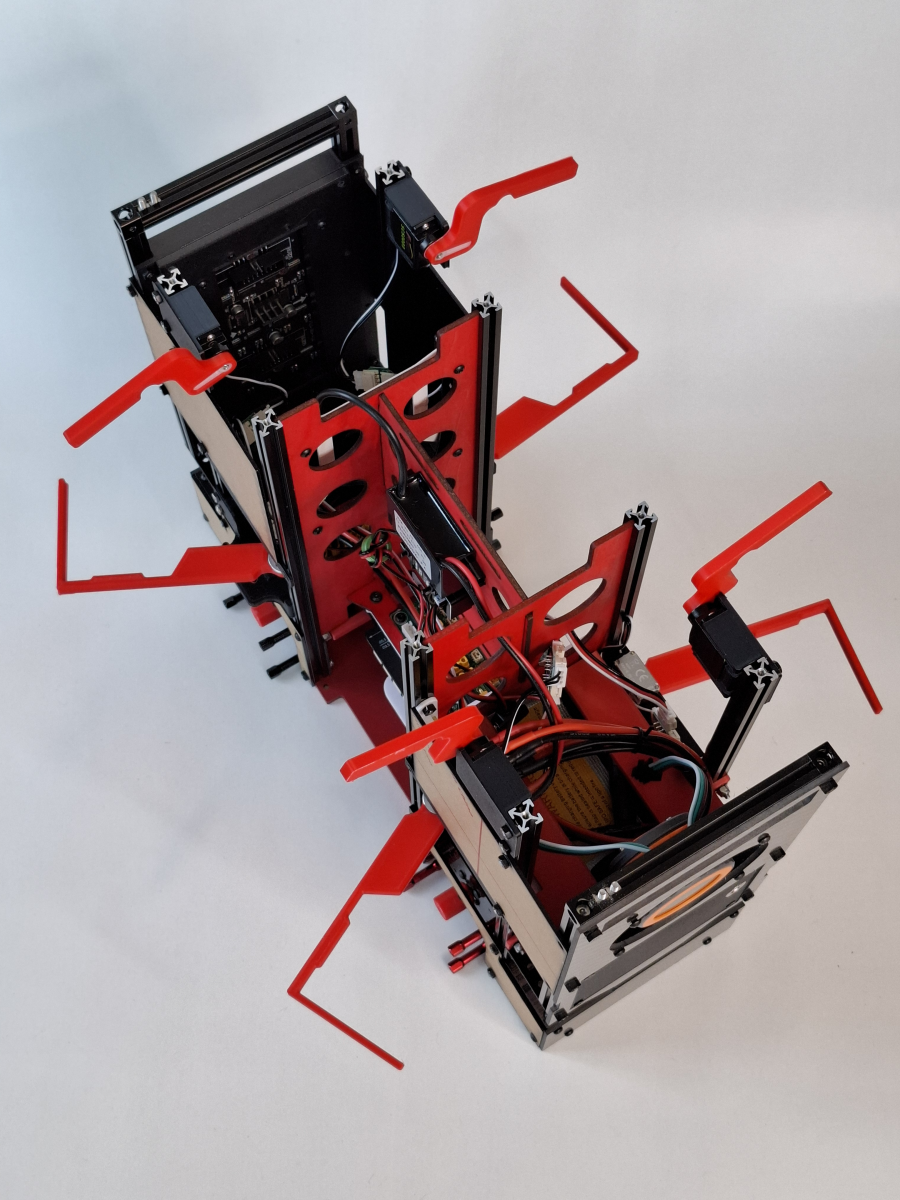
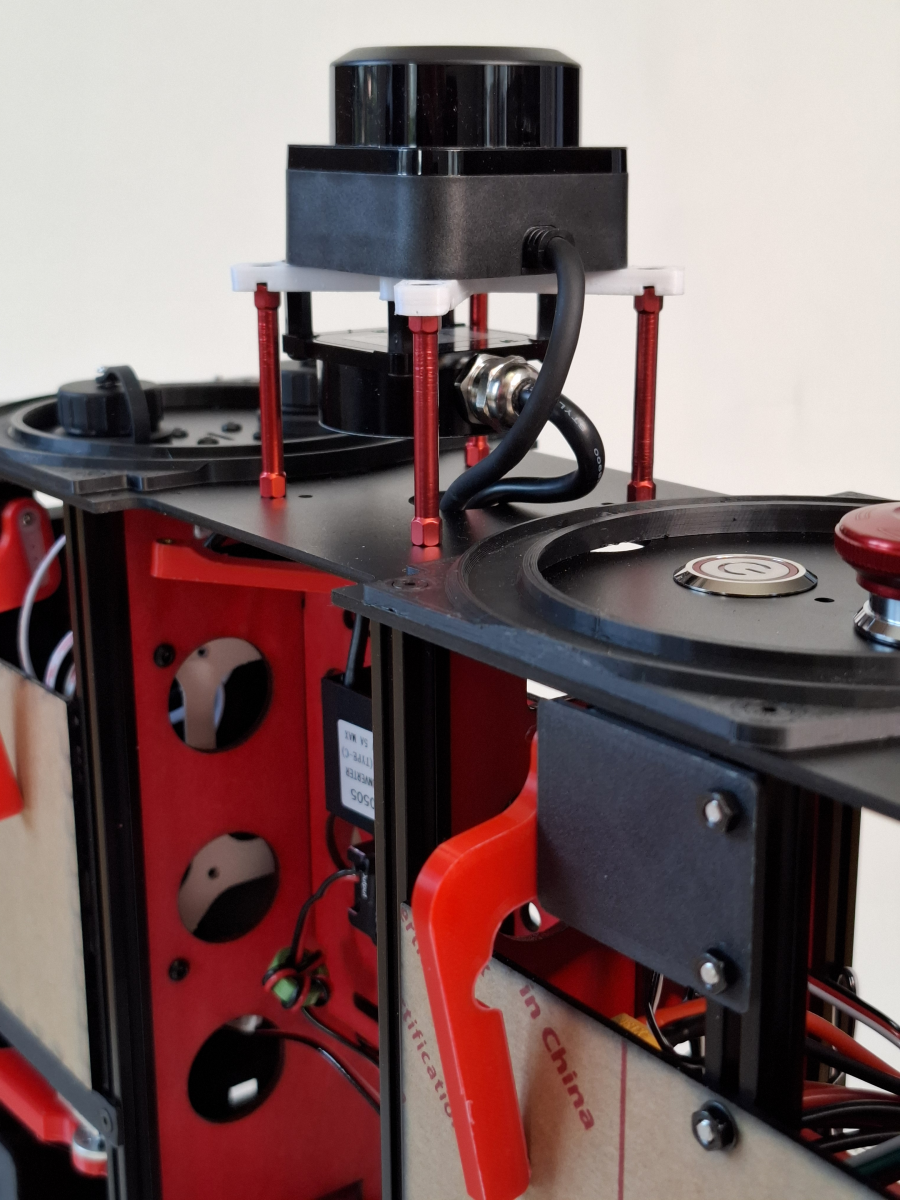
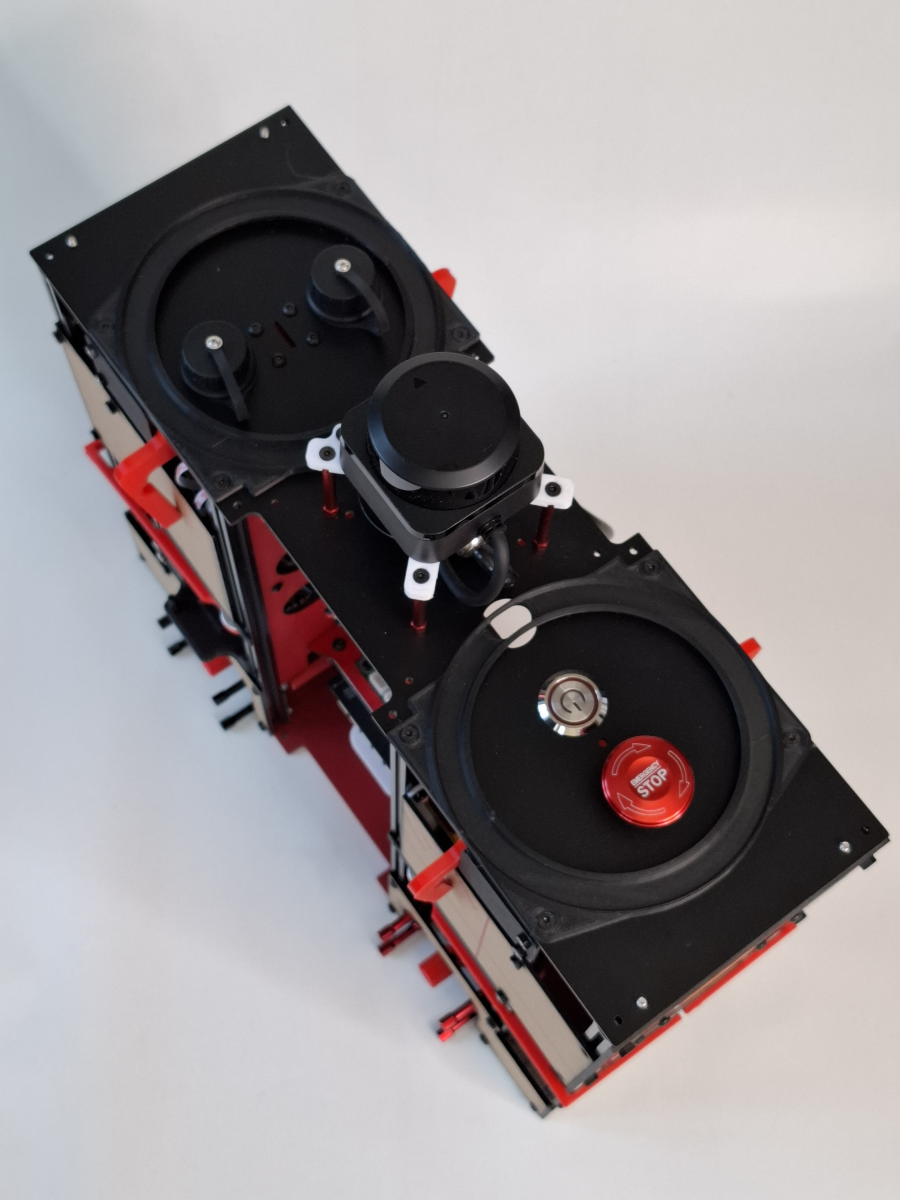
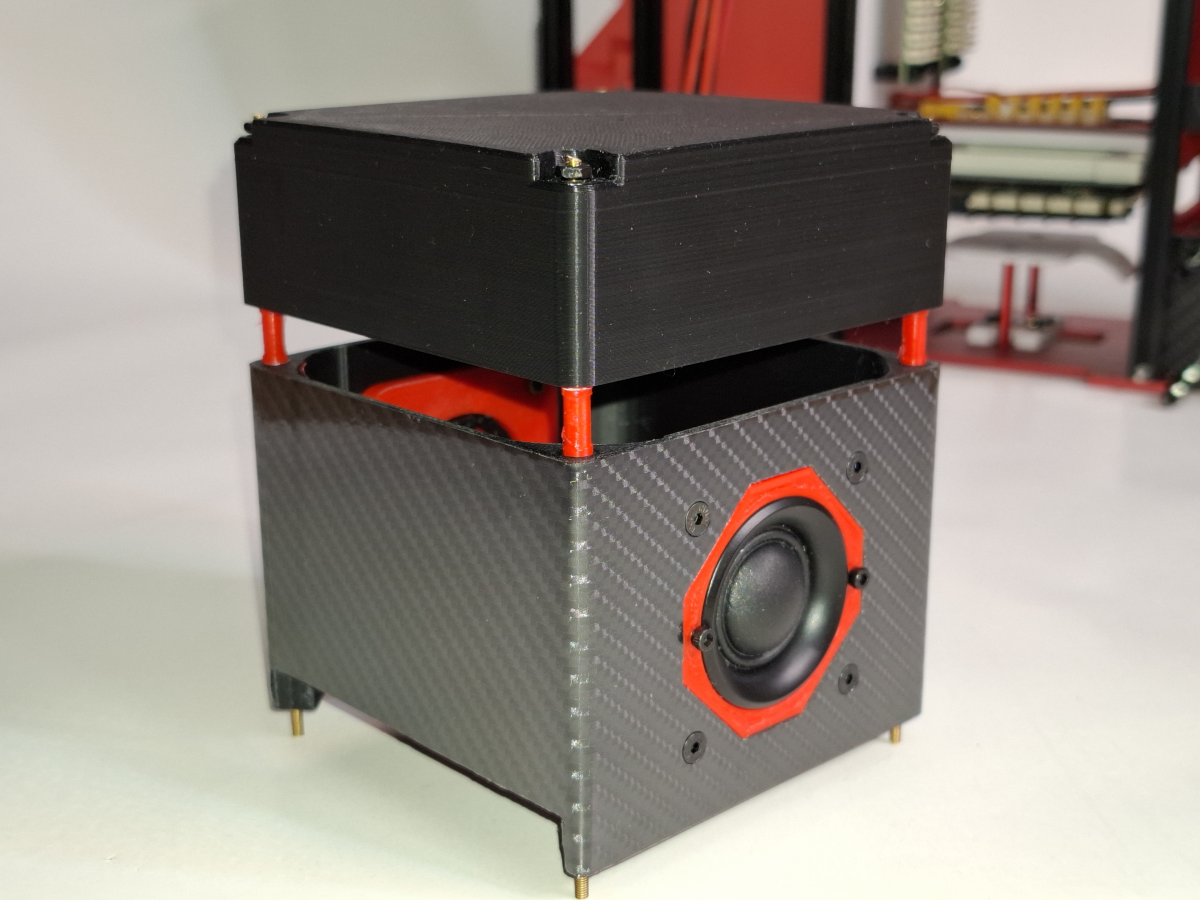
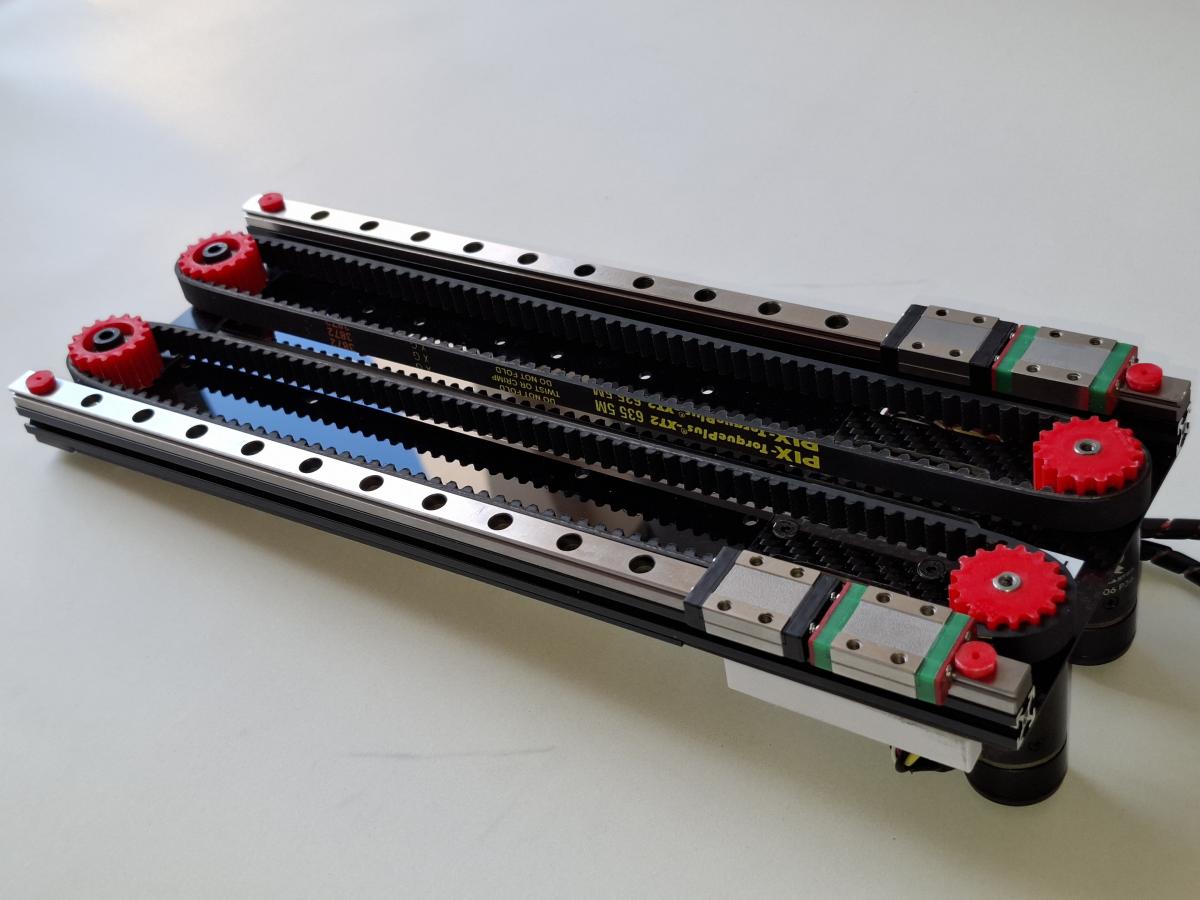
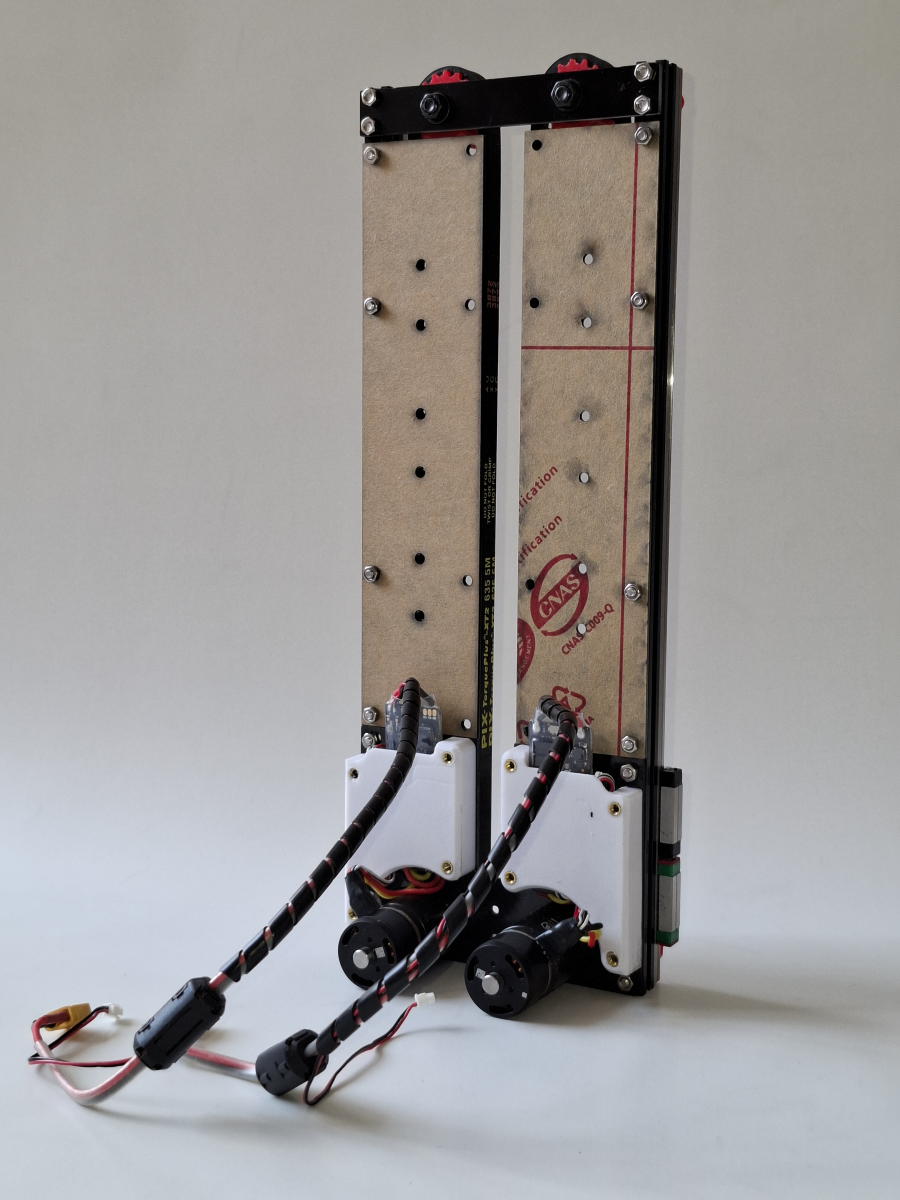
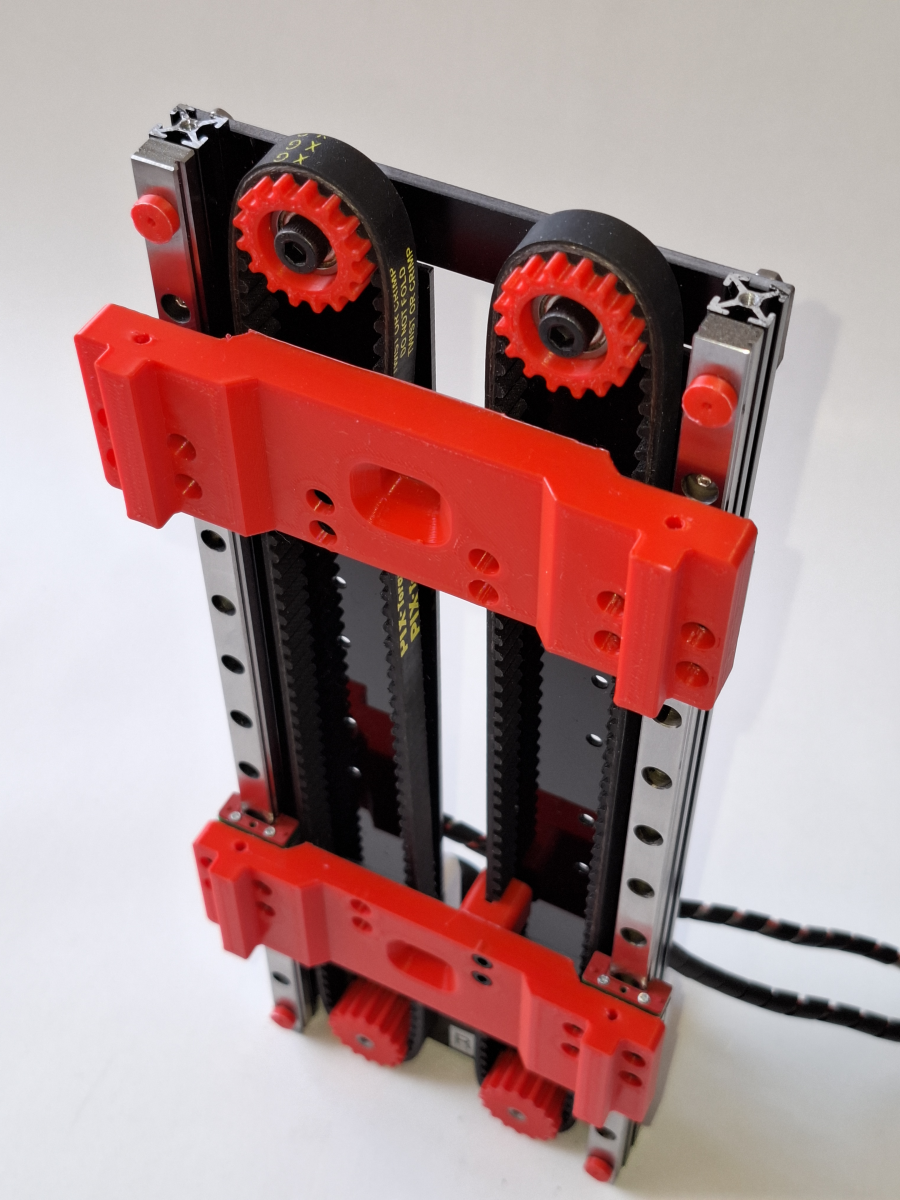
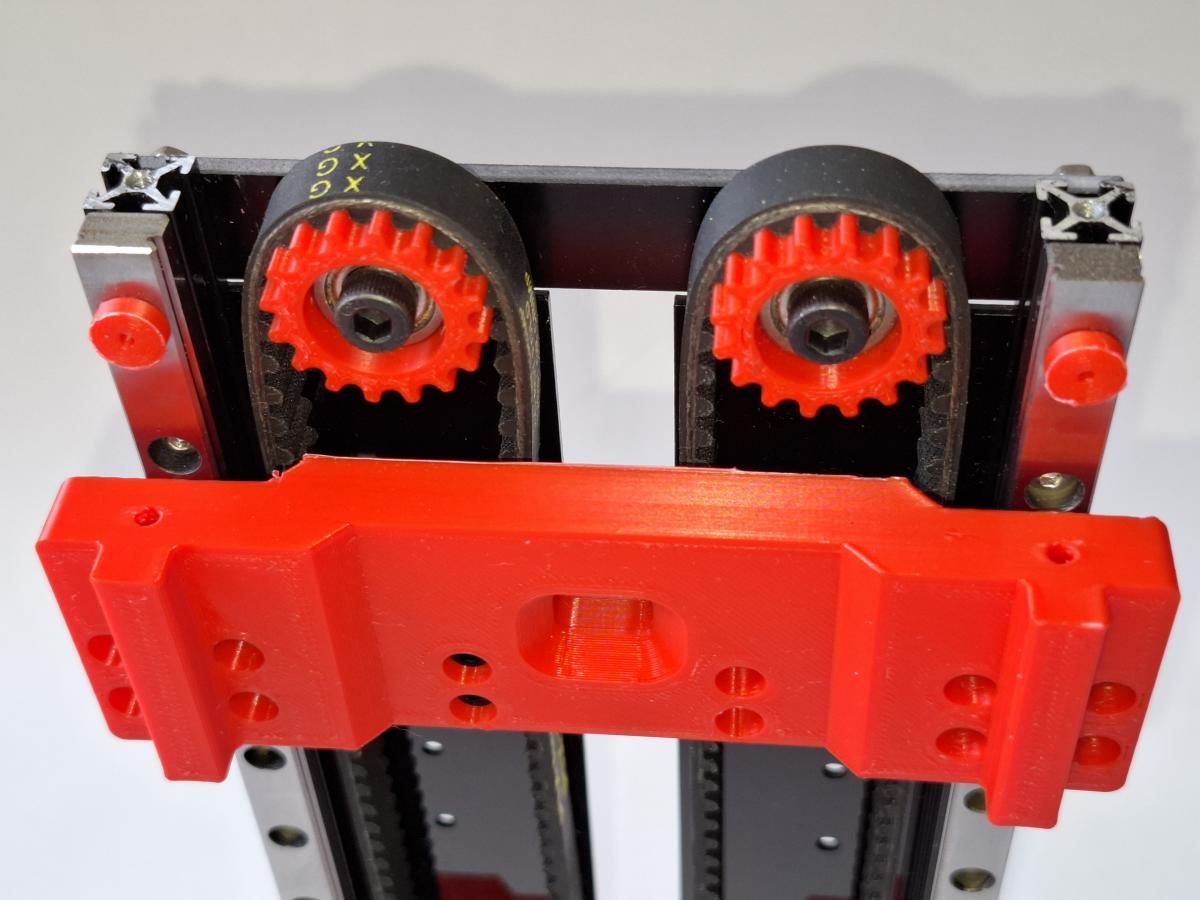
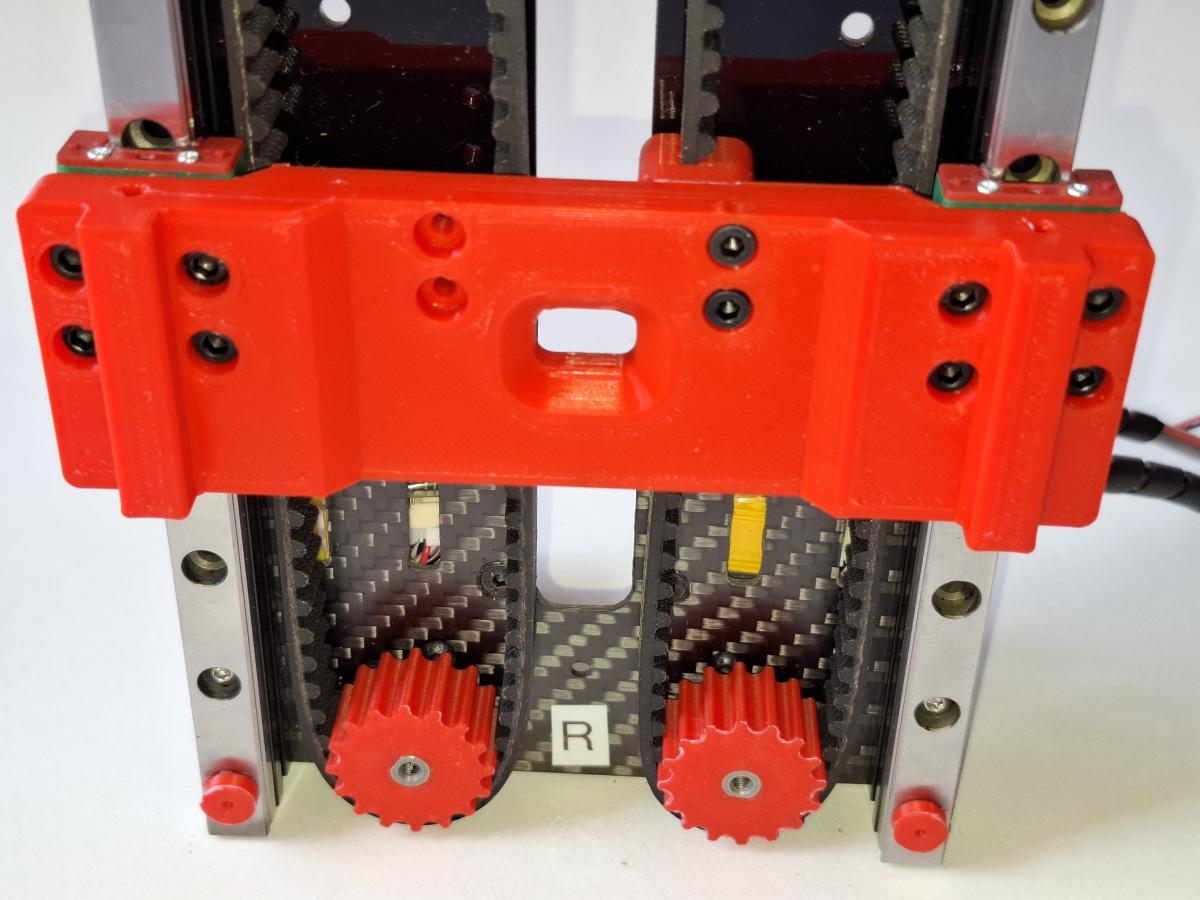
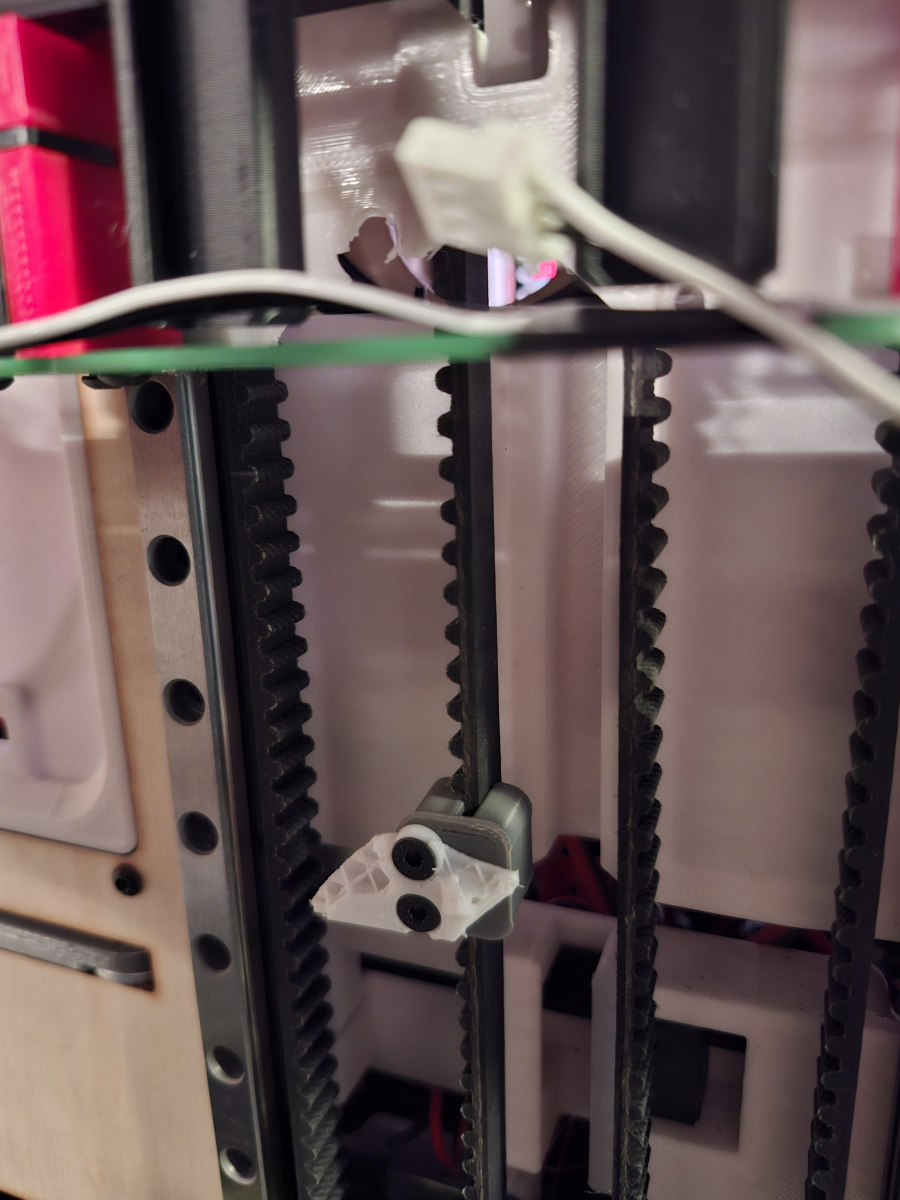
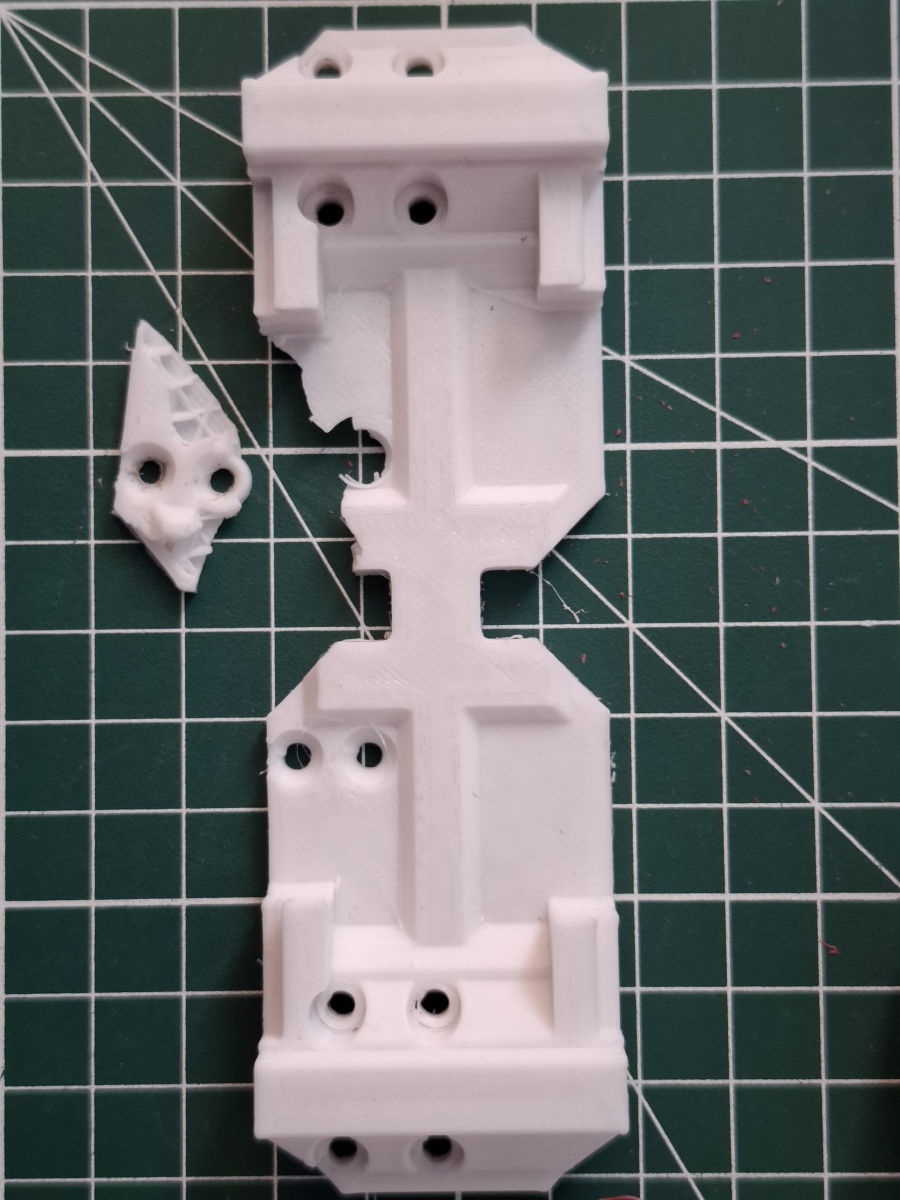
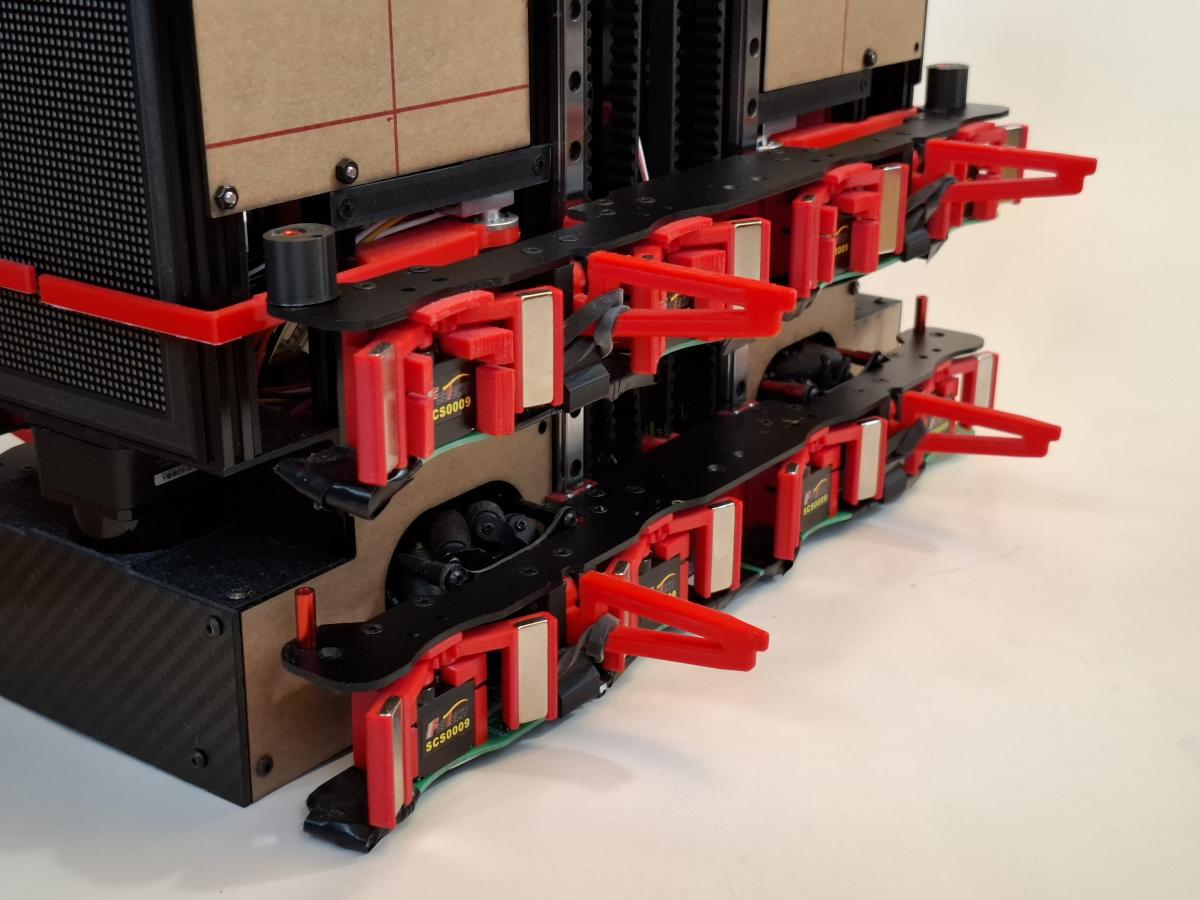
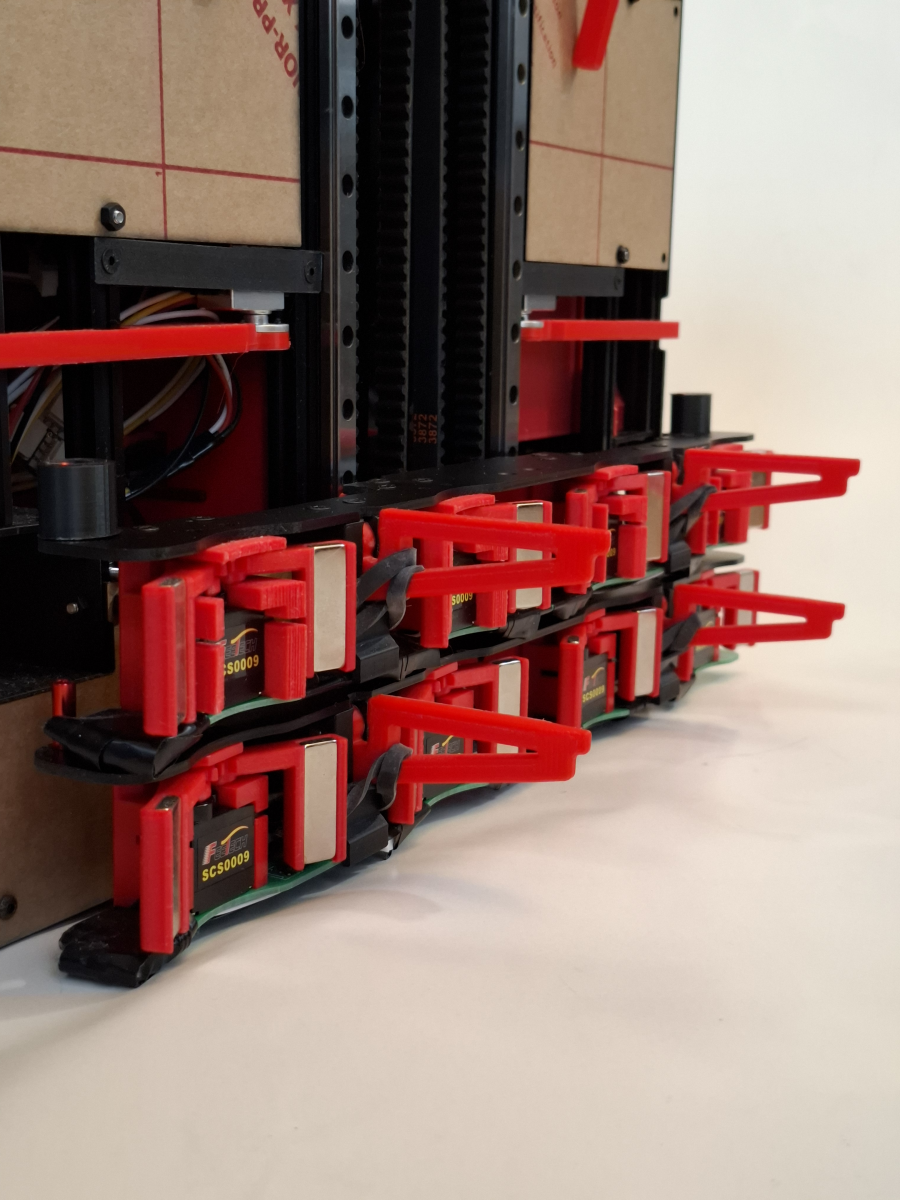
Nous allons bientôt revenir avec plusieurs photo de l'assemblage et quelques vidéo
à bientôt !