comme certains on pu voir dans le post de ma présentation, je suis en train de réaliser avec Aquanum un petit robot d'intérieur : ROBERT. Nous avons commencé ce projet il y a quelques mois dans le but de faire un robot capable de se déplacer en environnement connu et inconnu principalement. Ce sera l'occasion pour nous de tester différentes techniques de localisation, de cartographie ou encore pour d'autres fonctionnalités plus tard, des techniques de vision par exemple. Pour plus de détails je vous laisse aller voir sur le blog d'Aquanum : Yoann Sculo (Catégorie Robert) ou encore sur mon blog qui est plus récent : Inounx Projects. Ce post est l'occasion de vous présenter un peu les avancées du projet mais aussi de discuter et de recevoir des conseils

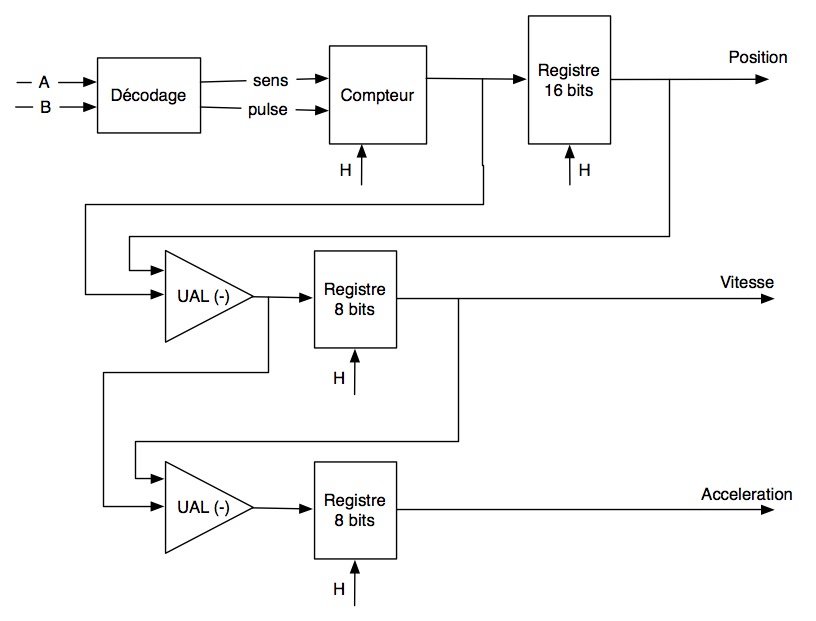
Nous en sommes pour l'instant à travailler sur l'asservissement, mais avant de pouvoir réellement se pencher dessus il nous faut déterminer une "structure" (si l'on peut dire) électronique qui gérera les fonctions bas niveau du robot (relevés capteurs, asservissement).
Principaux objectifs :
Se déplacer en environnement connu, ou inconnu.
Cartographier l'environnement au fur et à mesure des déplacements
Eviter les obstacles
Pouvoir effectuer un trajet demandé d'un point donné à un autre.
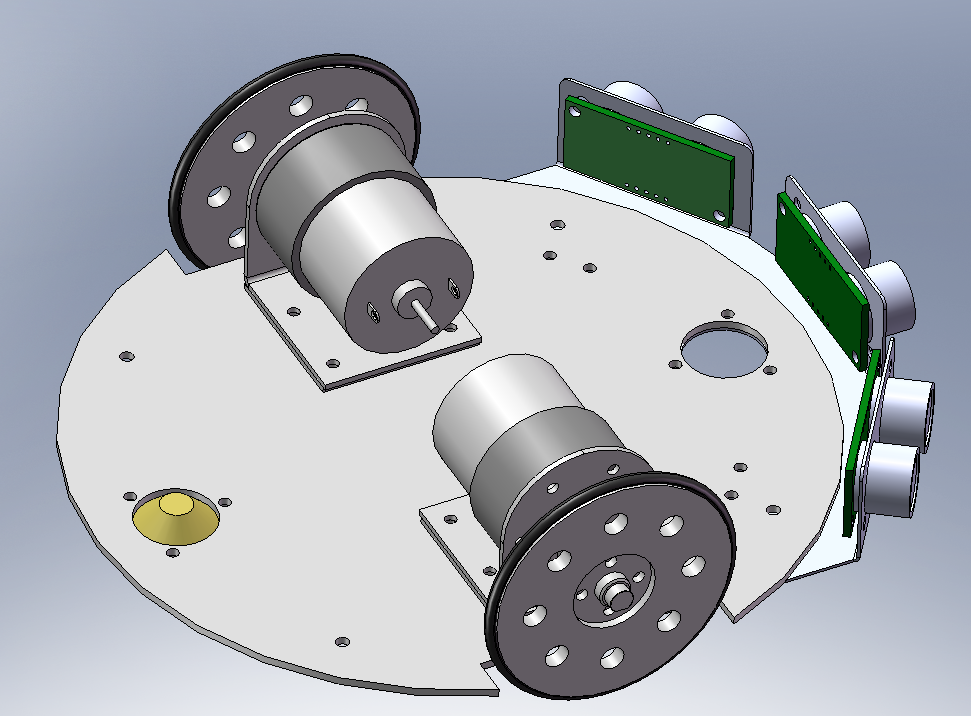
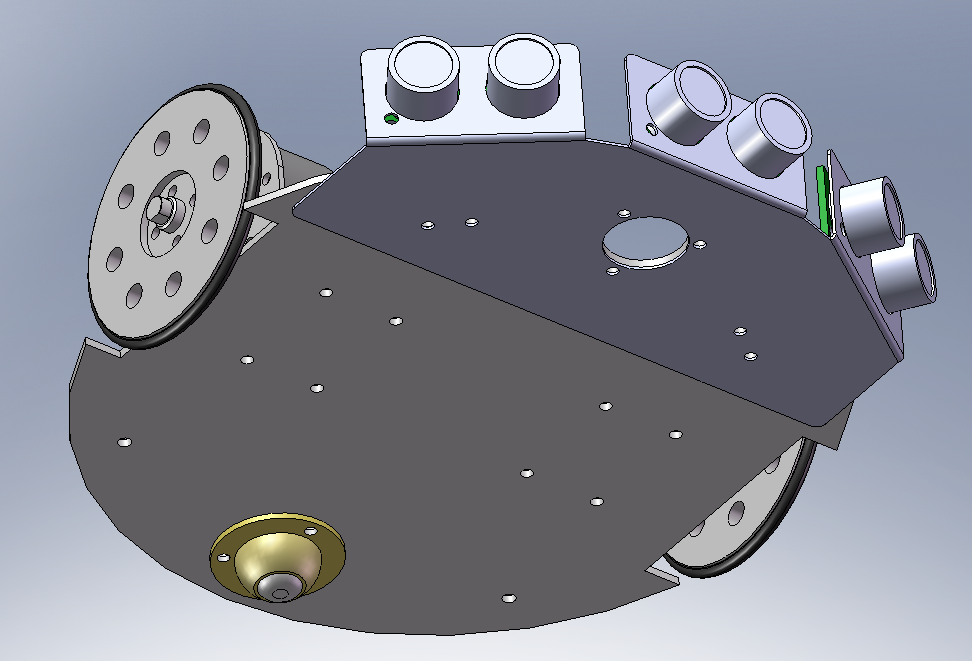
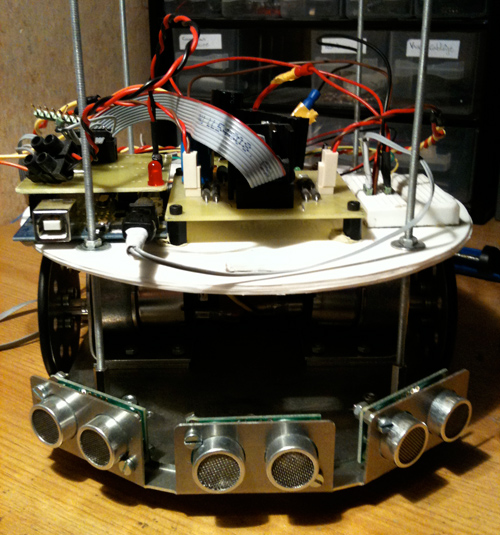
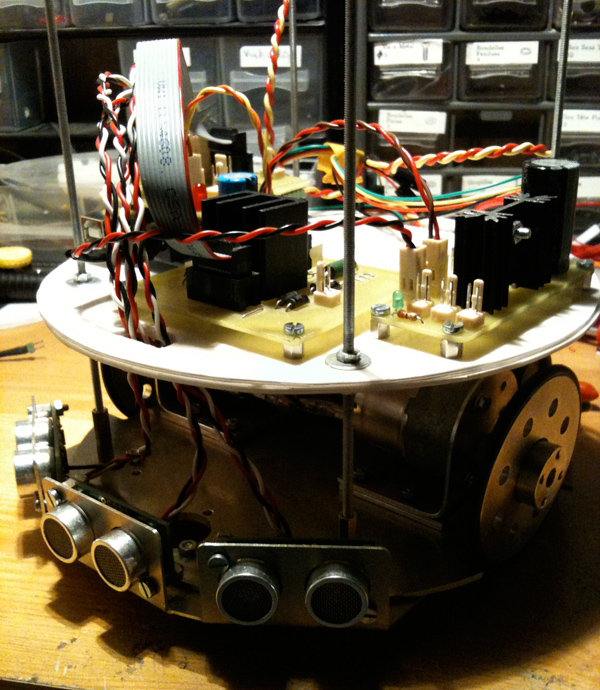
Coté matériel nous avons :
- Un chassis circulaire alu (commandé chez Easy Robotics)
- Des moteurs Lynxmotion GHM-03 (7.2V, 291 rpm)
- Les encodeur Lynxmotion qui vont avec
- 3 capteurs Ultrason
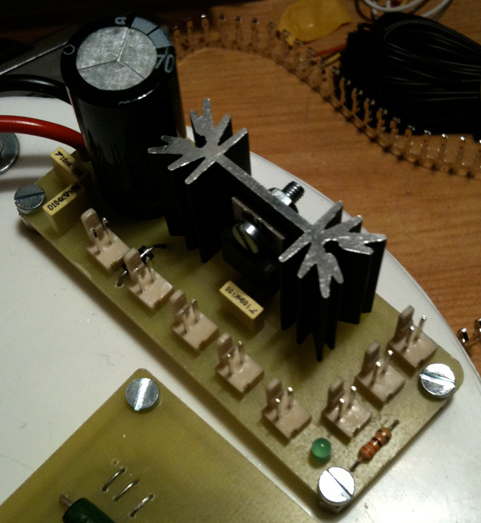
- Une carte driver moteur (double pont en H, basé sur un L298)
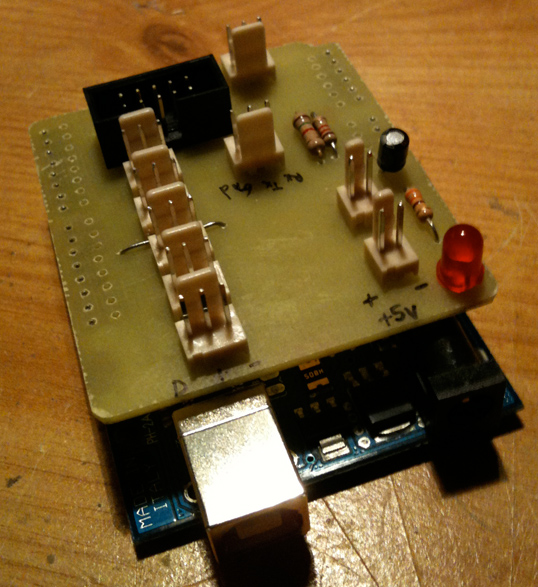
- Une arduino qui s'occupera vraisemblablement de l'asservissement et des capteurs.
- Une carte "mère", qui est une Roboard RB-100 pour moi et une Foxboard G20 pour Aquanum.
C'est une description assez succinte pour le moment (Aquanum tu peux compléter si tu t'en sens hein ^^) on détaillera un peu plus au fur et à mesure (plus de détails sont disponibles sur nos blogs respectifs).