
salut,
Est ce que qq un connait ce type de capteur de mouvement ici?
Et seriez vous l'interphaser avec une arduino?
merci
Pas2bol

18 réponses à ce sujet
#2

Luj
-

- Membres
-

- 295 messages
Habitué
- Gender:Not Telling
Posté 20 novembre 2010 - 04:55
Oui, c'est un capteur PIR (infra-rouge pyroélectrique) qui dispose de deux sorties que l'Arduino sait "lire" :
- une sortie "collecteur ouvert avec pull-up", c'est à dire tout ou rien, par défaut à niveau haut. Donc tu le branches sur n'importe quelle entrée digital (entre 2 et 12 de préférence) et tu fais un code du type :
Il existe une autre sortie, analogique, pour gérer toi-même le seuil de déclenchement, avec un simple "analogRead(x)".
Attention, c'est en CMS (soudure très fine, voire impossible au fer car le connecteur a l'air dessous) et c'est cher.
- une sortie "collecteur ouvert avec pull-up", c'est à dire tout ou rien, par défaut à niveau haut. Donc tu le branches sur n'importe quelle entrée digital (entre 2 et 12 de préférence) et tu fais un code du type :
void setup()
{
Serial.begin(9600);
pinMode(2,INPUT);
}
void loop()
{
if (digitalRead(2) == LOW)
{
Serial.print("ALARM !");
delay(1000); // pause d'une seconde
}
delay(100);
}
Il existe une autre sortie, analogique, pour gérer toi-même le seuil de déclenchement, avec un simple "analogRead(x)".
Attention, c'est en CMS (soudure très fine, voire impossible au fer car le connecteur a l'air dessous) et c'est cher.
#3
pas2bol
-
- Membres
- 83 messages
Membre
- Gender:Male
- Location:Massy
Posté 22 novembre 2010 - 09:15
Salut Lug,
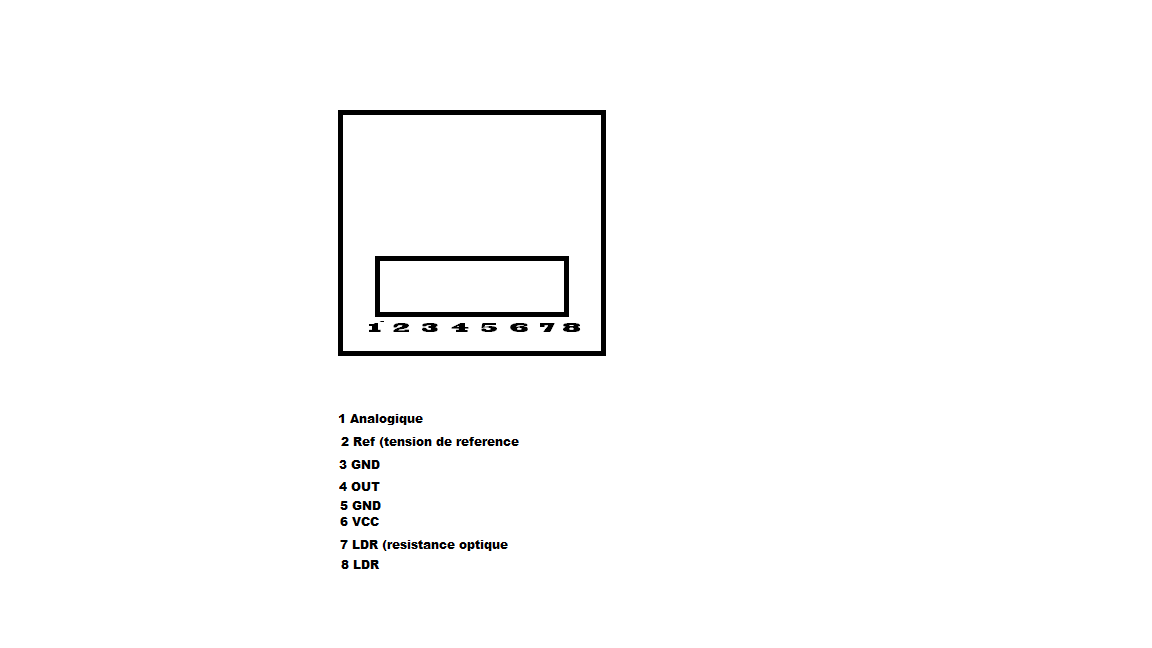
Merci pour tes réponses, sur ce capteur j'ai 8 sorties;
1 analogique (c'est clair)
2 REF ( là, je comprends pas)
3 GND
4 OUT (si j'ai suivi, c'est le pull up?)
5 GND
6 VCC
7 LDR (Led)
8 LDR (peut on brancher a la place de la led un pointeur laser?)
A ce capteur, j'aimerai y associer 2 servos moteurs, de facon a suivre le mouvement.
Sais tu comment faire?
Merci.
Pas2bol
Merci pour tes réponses, sur ce capteur j'ai 8 sorties;
1 analogique (c'est clair)
2 REF ( là, je comprends pas)
3 GND
4 OUT (si j'ai suivi, c'est le pull up?)
5 GND
6 VCC
7 LDR (Led)
8 LDR (peut on brancher a la place de la led un pointeur laser?)
A ce capteur, j'aimerai y associer 2 servos moteurs, de facon a suivre le mouvement.
Sais tu comment faire?
Merci.
Pas2bol
Image(s) jointe(s)
#4
Leon
-

- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 22 novembre 2010 - 06:40
Conrad (comme beaucoup de fournisseurs) met beaucoup de doc sur leur site:
http://www1.produktinfo.conrad.com/datenblaetter/150000-174999/172526-as-01-fr-PIR_SMD_MODUL_3_5V_80_UA.pdf
Pour le connecteur, je ne suis pas de l'avis de Luj, car ça ressemble très fort à un connecteur archi standard au pas de 2.54mm.
Leon.
http://www1.produktinfo.conrad.com/datenblaetter/150000-174999/172526-as-01-fr-PIR_SMD_MODUL_3_5V_80_UA.pdf
Pour le connecteur, je ne suis pas de l'avis de Luj, car ça ressemble très fort à un connecteur archi standard au pas de 2.54mm.
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#5
TIMAL
-

- Membres
- 53 messages
Membre
- Gender:Male
Posté 23 novembre 2010 - 09:51
salut,
Est ce que qq un connait ce type de capteur de mouvement ici?
Et seriez vous l'interphaser avec une arduino?
merci
Pas2bol
salut, pas2bol
la prochaine fois n'hésite pas et demande conseil pour le choix des capteurs, regarde :
http://cgi.ebay.fr/PIR-Body-Motion-sensor-module-for-Arduino-ARM-MCU-PIC-/150512086587?pt=LH_DefaultDomain_0&hash=item230b382e3b#ht_2330wt_936
sans prise de tête !!!!!!


#6
pas2bol
-
- Membres
- 83 messages
Membre
- Gender:Male
- Location:Massy
Posté 23 novembre 2010 - 10:33
salut, pas2bol
la prochaine fois n'hésite pas et demande conseil pour le choix des capteurs, regarde :
http://cgi.ebay.fr/P...b#ht_2330wt_936
sans prise de tête !!!!!!
salut Timal,
T'aurais du me l'dire avant!!!!
Moins cher, apparement special Arduino, tampis, la prochaine fois je demanderai conseil . Et pour le mien, as tu des réponses ? et sur la facon d'"associer" le capteur avec les servos?
A + Timal
Pas2bol
Ps: et ton robot fonctionne bien ?
#7
TIMAL
-
- Membres
- 53 messages
Membre
- Gender:Male
Posté 23 novembre 2010 - 03:03
je ne comprend pas trop ton problème:salut Timal,
T'aurais du me l'dire avant!!!!
Moins cher, apparement special Arduino, tampis, la prochaine fois je demanderai conseil . Et pour le mien, as tu des réponses ? et sur la facon d'"associer" le capteur avec les servos?
A + Timal
Pas2bol
Ps: et ton robot fonctionne bien ?
vcc c'est le 5v de l'arduino
gnd c'est le gnd de l'arduino
out c'est une sortie numérique de l'arduino "exemple PIN 12"
tu branches le out de ton servo sur l'arduino "exemple pin 11"
le vcc et gnd sur alim externe.
tu programmes : si le capteur pir est LOW tourner le servo à gauche
si le capteur pir est high tourner le servo à droite
ps: le robot est 100% opérationnel, la gestion de la charge à été validée et maintenant il est 24H/24 en alerte!!!
:plus haut j'ai mis des nouveaux liens de robie avec la fonction mp3 et led.
: aujourd'hui j'ai acheté une barre en alu pour construire mon drône!!!!!!c'est parti pour une nouvelle aventure.
Au boulot!!!!!
#8
pas2bol
-
- Membres
- 83 messages
Membre
- Gender:Male
- Location:Massy
Posté 24 novembre 2010 - 09:42
Salut Timalje ne comprend pas trop ton problème:
vcc c'est le 5v de l'arduino
gnd c'est le gnd de l'arduino
out c'est une sortie numérique de l'arduino "exemple PIN 12"
tu branches ton servo sur l'arduino
vcc
gnd
une sotie numérique de l'arduino "exemple pin 11"
tu programmes : si le capteur pir est LOW tourner le servo à gauche
si le capteur pir est high tourner le servo à droite
ps: le robot est 100% opérationnel, la gestion de la charge à été validée et maintenant il est 24H/24 en alerte!!!
:plus haut j'ai mis des nouveaux liens de robie avec la fonction mp3 et led.
: aujourd'hui j'ai acheté une barre en alu pour construire mon drône!!!!!!c'est parti pour une nouvelle aventure.
Au boulot!!!!!
Pour brancher le capteur , j'ai bien compris : VCC, GND, OUT pas de probleme
En fait ce sont les sorties REF et LDR qui me posent probleme, pour LDR (LED) je pense... je voudrais y mettre un pointeur laser a la place est ce posssible?
Ensuite j'ai pas trop saisi ton explication au sujet des servos, ou ca ne correspond pas à ce que je veux faire :
Lorsqu'un Mvt. est detecté, je voudrais que ma tourelle qui comprends 2 servos suivent ce mouvement.
Sinon a part ca, felicitation pour le choix d'un drone, moi ca me motive. Amuse toi bien.
Pas2bol.
#9
TIMAL
-
- Membres
- 53 messages
Membre
- Gender:Male
Posté 24 novembre 2010 - 11:15
Salut Timal
Pour brancher le capteur , j'ai bien compris : VCC, GND, OUT pas de probleme
En fait ce sont les sorties REF et LDR qui me posent probleme, pour LDR (LED) je pense... je voudrais y mettre un pointeur laser a la place est ce posssible?
Ensuite j'ai pas trop saisi ton explication au sujet des servos, ou ca ne correspond pas à ce que je veux faire :
Lorsqu'un Mvt. est detecté, je voudrais que ma tourelle qui comprends 2 servos suivent ce mouvement.
Sinon a part ca, felicitation pour le choix d'un drone, moi ca me motive. Amuse toi bien.
Pas2bol.
Tu sais ce n'est pas parce que ta pleins de broches qu'il faut obligatoirement les brancher et n'oubli pas google est ton ami!!!!!
ldr c'est pas fait pour une led mais pour une photorésistance "capteur de lumière cds" prend le réflexe de chercher sur google!!!!cela permet a ton pir de fonctionner seulement si il n'y a plus de lumière.
si t'as deux servos il te faut deux pir!!!!
donc ton deuxième servo tu le branches sur pin 10 arduino
et ton deuxième pir sur pin 9 arduino
N'oubli pas qu'il faut passer par une alim externe pour alimenter les servos car le 5V de l'arduino n'a pas assez de jus.
ldr n'est pas fait pour mettre un laser.
#10
pas2bol
-
- Membres
- 83 messages
Membre
- Gender:Male
- Location:Massy
Posté 24 novembre 2010 - 12:11
Tu sais ce n'est pas parce que ta pleins de broches qu'il faut obligatoirement les brancher et n'oubli pas google est ton ami!!!!!
ldr c'est pas fait pour une led mais pour une photorésistance "capteur de lumière cds" prend le réflexe de chercher sur google!!!!cela permet a ton pir de fonctionner seulement si il n'y a plus de lumière.
si t'as deux servos il te faut deux pir!!!!
donc ton deuxième servo tu le branches sur pin 10 arduino
et ton deuxième pir sur pin 9 arduino
N'oubli pas qu'il faut passer par une alim externe pour alimenter les servos car le 5V de l'arduino n'a pas assez de jus.
ldr n'est pas fait pour mettre un laser.
Google? je crois que je devrais avoir des actions !!!
Bon c'est vrai que j'ai pas chercher pour LDR, persuadé que c'était pour une Led

2 servos, 2 PIR ? Fait chier, il coute 26 l'unité(faute de m'etre renseigné). Donc 1 PIR commande un seul servo a la fois, et ne peut commander 2 servos en meme temps? bon... ca c'est fait,
Peux tu me dire quelle est la fonction du tien
Pas2bol
#11
TIMAL
-
- Membres
- 53 messages
Membre
- Gender:Male
Posté 24 novembre 2010 - 02:31
Heu!!!!! je crois que t'as pô compris ce que fait un pir.Google? je crois que je devrais avoir des actions !!!
Bon c'est vrai que j'ai pas chercher pour LDR, persuadé que c'était pour une Led
2 servos, 2 PIR ? Fait chier, il coute 26 l'unité(faute de m'etre renseigné). Donc 1 PIR commande un seul servo a la fois, et ne peut commander 2 servos en meme temps? bon... ca c'est fait,
Peux tu me dire quelle est la fonction du tien
Pas2bol
Il détecte si il y a ou pas quelqu'un c'est tout. Un pir ne te dira pas il y a quelqu'un à gauche ou a droite.
je caricature car un pir à un grand champ de détection donc en gros Si le pir est a gauche et que quelqu'un va a doite il se passera rien si il y a quelqu'un à gauche il détecte.
Sur un champ de détection de 360°, que tu passes devant le détecteur par la droite ou par la gauche, la seul chose qu'il peut te dire c'est
si il a quelqu'un ou pas!!!!!!!
Sur mon tutoriel il y a toutes les infos pour avoir le meilleur rapport qualité prix
par exemple deux servo MG995 = 10 sur ebay, 1 PIR = 5
Dans mon tutoriel
 je dis bien que le PIR permet de détecter la présence d'un intrus dans ma maison;
je dis bien que le PIR permet de détecter la présence d'un intrus dans ma maison;c'est à dire, quand je part de chez moi j'appui sur surveillance et robie est en mode alerte;
si quelqu'un rentre chez moi sans la permission robie film pendant 5s et il m'envoie un mail sur ma boite pour m'alerter.
#12
pas2bol
-
- Membres
- 83 messages
Membre
- Gender:Male
- Location:Massy
Posté 24 novembre 2010 - 03:04
Heu!!!!! je crois que t'as pô compris ce que fait un pir.
Il détecte si il y a ou pas quelqu'un c'est tout. Un pir ne te dira pas il y a quelqu'un à gauche ou a droite.
je caricature car un pir à un grand champ de détection donc en gros Si le pir est a gauche et que quelqu'un va a doite il se passera rien si il y a quelqu'un à gauche il détecte.
Sur un champ de détection de 360°, que tu passes devant le détecteur par la droite ou par la gauche, la seul chose qu'il peut te dire c'est
si il a quelqu'un ou pas!!!!!!!
Sur mon tutoriel il y a toutes les infos pour avoir le meilleur rapport qualité prix
par exemple deux servo MG995 = 10 sur ebay, 1 PIR = 5
Dans mon tutoriel
c'est à dire, quand je part de chez moi j'appui sur surveillance et robie est en mode alerte;
si quelqu'un rentre chez moi sans la permission robie film pendant 5s et il m'envoie un mail sur ma boite pour m'alerter.
heu!!! j'crois que ta po compris ce que je veux faire.... je sais bien qu'un pir sert a détecter une présence et c'est d'ailleurs pour cela que je l'ai acheté

bon en image, voila ce que je veux faire you tube
Ma question est donc , comment fait il?
#13
TIMAL
-
- Membres
- 53 messages
Membre
- Gender:Male
Posté 24 novembre 2010 - 04:47
heu!!! j'crois que ta po compris ce que je veux faire.... je sais bien qu'un pir sert a détecter une présence et c'est d'ailleurs pour cela que je l'ai acheté
bon en image, voila ce que je veux faire you tube
Ma question est donc , comment fait il?
ce n'était pas du tout explicite.
sur la video je vois un capteur à ultrason et pas de pir, après tout est une question de programmation contacte le gars qui a posté la video.
#14
pas2bol
-
- Membres
- 83 messages
Membre
- Gender:Male
- Location:Massy
Posté 24 novembre 2010 - 05:22
ce n'était pas du tout explicite.
sur la video je vois un capteur à ultrason et pas de pir, après tout est une question de programmation contacte le gars qui a posté la video.
ok, désolé de te prendre la tete, l'exemple est peut etre pas bon, pour moi l'idee est simple je veux que ma cam suive une personne en mouvement ou objet... bref de toute facon, je viens de cramer un inter.
Merci pour tes réponses Timal
A+
#15
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 24 novembre 2010 - 06:54
Comme dit Timal, ce n'est clairement pas avec un PIR qu'on peut faire ça...Lorsqu'un Mvt. est detecté, je voudrais que ma tourelle qui comprends 2 servos suivent ce mouvement.
Son robot a 2 webcams, et un soft derrière de reconnaissance de couleur, c'est tout. C'est expliqué dans les posts du gars sur ce forum:heu!!! j'crois que ta po compris ce que je veux faire.... je sais bien qu'un pir sert a détecter une présence et c'est d'ailleurs pour cela que je l'ai acheté
bon en image, voila ce que je veux faire you tube
Ma question est donc , comment fait il?
http://forums.trossenrobotics.com/showthread.php?t=1312
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#16
pas2bol
-
- Membres
- 83 messages
Membre
- Gender:Male
- Location:Massy
Posté 24 novembre 2010 - 07:50
Comme dit Timal, ce n'est clairement pas avec un PIR qu'on peut faire ça...
Son robot a 2 webcams, et un soft derrière de reconnaissance de couleur, c'est tout. C'est expliqué dans les posts du gars sur ce forum:
http://forums.trosse...read.php?t=1312
Leon.
Il n'est donc pas possible de suivre a l'aide de ma caméra une personne se déplaçant dans mon salon par exemple, et cela de maniere automatique?
Pas2bol
#17
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 24 novembre 2010 - 07:57
Si, c'est possible. Mais pas forcément simple. Il existe certainement des softs tout fait pour ça. Mais c'est en dehors de mes compétences.
Je ne te conseille pas de te lancer là dedans, vu ton niveau... désolé, mais il vaut mieux être franc parfois.
Leon.
Je ne te conseille pas de te lancer là dedans, vu ton niveau... désolé, mais il vaut mieux être franc parfois.
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#18
skyhack
-

- Membres
-
- 885 messages
Membre passionné
- Gender:Male
- Location:Racourt et Flaba (08)
- Interests:Synthé, modélisation mécanique, bricolage divers, VTT enduro
Posté 24 novembre 2010 - 10:54
Heu ... j'voudrais pas faire celui qui a besoin d'argent tout de suite mais je vends (au cas où tu saurait pas) un lot de 6 capteurs infrarouges (ceux du kit BOE-BOT de chez parallax et tout un tas de composant à côté en triple) ils sont tout simple à utiliser et sont très précis car ils comportent leur propre électronique de contrôle et tout et tout ... tu peux ainsi t'en servir autant en télémètre qu'en simple capteur de mouvement. Je vend même en plus un télémètre sharp ...
Alors je sais pas toi mais je pense comme Léon (et oui ça m'arrive ...dsl j'ai pas pu m'empêcher là ^^), je pense que tu devrais abandonner les PIR, trop complexe pour toi à mon avais (vu les questions que tu pose.
skyhack.
Alors je sais pas toi mais je pense comme Léon (et oui ça m'arrive ...dsl j'ai pas pu m'empêcher là ^^), je pense que tu devrais abandonner les PIR, trop complexe pour toi à mon avais (vu les questions que tu pose.
skyhack.
" Monsters are real. Ghosts are real too.
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
#19
pas2bol
-
- Membres
- 83 messages
Membre
- Gender:Male
- Location:Massy
Posté 25 novembre 2010 - 01:29
Si, c'est possible. Mais pas forcément simple. Il existe certainement des softs tout fait pour ça. Mais c'est en dehors de mes compétences.
Je ne te conseille pas de te lancer là dedans, vu ton niveau... désolé, mais il vaut mieux être franc parfois.
Leon.
T'as certainement raison, faut etre réaliste c'est tout.
Merci Leon
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




