Je suis en terminal SI.
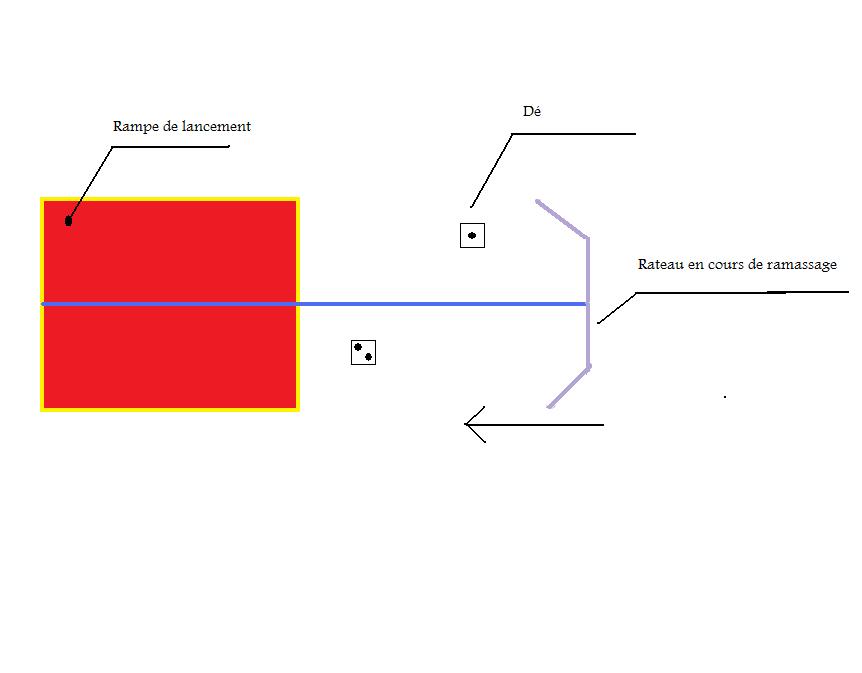
Et je dois faire une fonction qui me permettra de déplacer des dés d'une zone à une autre.
Les dés peuvent être posés dès le départ sur leur emplacement, mais je dois pouvoir réussir à le reprendre en cas de mauvais lancé, (je n'ai pas le droit d'utiliser de pince pour effectuer cette fonction).
J'ai eu l'idée d'utiliser une sorte de rampe, qui basculerait pour faire glisser les dés. Mais le problème c'est que je gènerai selon les autres, leurs propres fonctions. De plus en cas de mauvais lancés cela m'empecherais de reprendre les dés.
Pour les dés.
Matières:Mousse
Dimension: 50*50*50mm
Merci pour vos réponses.
Fichier(s) joint(s)
-
 emplacement dés.bmp 719,88 Ko
155 téléchargement(s)
emplacement dés.bmp 719,88 Ko
155 téléchargement(s)