Merci pour votre réponse mais nous avons pas mal de contraintes qui rend plus compliqué le système que vous proposez malgrès qu'il soit très intéressant, dommage :
- pas dobjet rond, là votre prototype est compatible... ça marche mais :
- on est plusieurs équipe qui travail sur plusieurs partit du robot. On ne peux pas prendre beaucoup de place car faut respecter les partit des autres équipes.là le votre se trouve plutot haut milieu vu qu'il faut y intégrer des moteurs, une réserve pour les projectiles etc...
-Le robot est de petite taille (doit être)
donc le système que l'on recherche doit être petit, dans les 20-30 centimètre de large. On n'as pas besoin d'une bete en puissance. Le projectile/palet doit parcourir dans les 20 cm ^^" ce que l'on doit faire basculer sont juste des planches de bois soutenus par des petits pivots.
On doit en renverser 3 et on a droit à 4 projectile.
Voilà une idée :
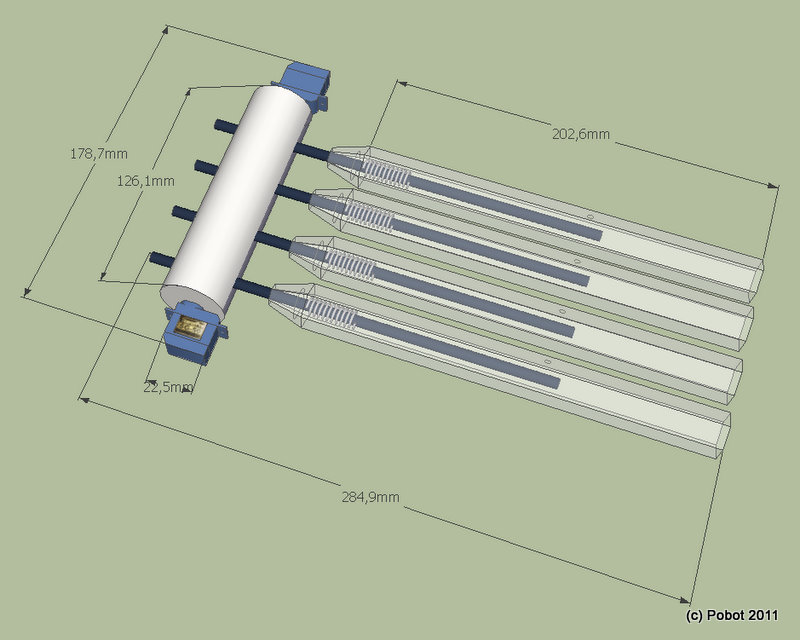
- on installe 4 canons à la suite, aligné dans l'horizontale. (des petits) chacun sont déjà chargés
- le canon se serait un stylo bic + un ressort puissant + une mine à l'envers tiré au max et quand on le lâche (la mine de stylo bic) celle ci sort par le derrière du stylo qui sera bien entendu ouvert.
- la mine sera déjà tiré, le ressort compressé.
- on trouvera un système de détente qui tiendra la mine tendue. Ce système sera déclenché grâce à une vis sans fin et un boulon (celui ci tournera autour) et qui poussera la détente... on aura en faite juste à ordonner que la vis sans fin tourne grâce à un moteur et de larrêter... a chaque fois que la détente a laché la mine/projectile.
Mais nous ne savons pas comment faire ce système de detente qui retiendrai la mine et le lâchera sous la pression du boulon... (celui-ci pourra être accroche à un tube en pvc qui ce dernier entourera le stylo)
merci d'avance de votre aide