
Alors voilà, aujourd'hui j’entame une longue construction de robot.
C'est un robot à trois roues comme le titre l'indique, mais plus exactement à deux roues motrices indépendantes et une bille (ball caster).
Je me donne 10 Jours pour le terminer, en prenant en compte que j'ai déjà fait les plans et les calculs de force.
J'ai donc acheté pour ce robot:
Une Arduino Duemilanove.
Un capteur ultrason.
Deux servos bas de gamme (BMS410) pour la tourelle.
Un kit motorisé Devantech 12V avec roues et support.
Une batterie 12V 7Ah au plomb.
Un fusible réamorçable de 8A.
Un bouton 3 position On-Off-On.
De l'aluminium en plat de 15 mm et en L de 15 mm aussi pour le châssis.
De la visserie de toutes les tailles.
Des rivets de différentes longueurs.
Un Ballcaster 25 mm / 25 Kg.
Des entretoises de circuits de 3 mm.
Quelques fournitures de bricolage.
Je dois certainement oublier quelques petites choses achetés ou récupérées.
Avec tout ça je pense pouvoir faire un joli robot d'appartement.
Je posterais des photos dans l’après midi, lorsque j'aurais bien avancer.
Mon robot doit être capable de se déplacer en autonomie dans les différentes pièces de la maison.
Tout cela en optimisant les trajectoires pour éviter qu'il fasse des tours sur lui même quand il est confronter à des dilemmes, d’où l’intérêt de la tourelle.
Ce sera son seul rôle dans un premier temps mais étant débutant en robotique, j’estime que la difficulté est déjà assez élevé pour le noob que je suis.
Je ne pense pas que le sujet intéressera du monde, mais si ça peut aider des petits jeunes dans le métier comme moi !

53 réponses à ce sujet

#3

ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 01 avril 2011 - 08:17
Merci, oui il va m'en falloir.
Ma foi, j'ai terminé le gros du châssis et j'ai même monté une platine de test en carton.
Je poste quelques étapes en photo:
(UPLOAD EN COURS)

^ Pleine séance de traçage des découpes et des perçages (Environ 2H30)

^ Je regarde si les moteurs passent bien dans le châssis.

^ Le petit coin découpe.

^ Découpe de toutes les pièces et perçage des pièces.
Avec un essai de pré assemblage. (2h)

^ Assemblage des pièces du châssis. J'ai eu quelques soucis dans le montage évidemment, l'ajustement n'était pas terrible, j'ai dû bricoler un peu, mais le résultat est sympa. (3h dont 2 heures d'ajustage)

^ Montage des supports de moteur et de l'arrière du châssis.

^ Montage des moteurs et des roues sur les arbres. (Quel magnifique dessous de plat en fonte !)
J'ai donc de suite installé les cartes sur le châssis, il prendra vie demain si tout se passe bien.
[...]
Ma foi, j'ai terminé le gros du châssis et j'ai même monté une platine de test en carton.
Je poste quelques étapes en photo:
(UPLOAD EN COURS)
^ Pleine séance de traçage des découpes et des perçages (Environ 2H30)
^ Je regarde si les moteurs passent bien dans le châssis.
^ Le petit coin découpe.
^ Découpe de toutes les pièces et perçage des pièces.
Avec un essai de pré assemblage. (2h)
^ Assemblage des pièces du châssis. J'ai eu quelques soucis dans le montage évidemment, l'ajustement n'était pas terrible, j'ai dû bricoler un peu, mais le résultat est sympa. (3h dont 2 heures d'ajustage)
^ Montage des supports de moteur et de l'arrière du châssis.
^ Montage des moteurs et des roues sur les arbres. (Quel magnifique dessous de plat en fonte !)
J'ai donc de suite installé les cartes sur le châssis, il prendra vie demain si tout se passe bien.
[...]
#4
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 02 avril 2011 - 11:10
Je dois être le plus gigantesque blaireau de la robotique que personne n'est jamais connu.
Gros gros problème ce matin, erreur d'inattention pendant le câblage, le contrôleur de moteur est mort, régulateur 5v H.S.
Vu son prix, je pense que mon projet va me couter du pognon.
Étant donné que je n'ai pas pu dessouder le composant, je ne peut donc pas le réparer.
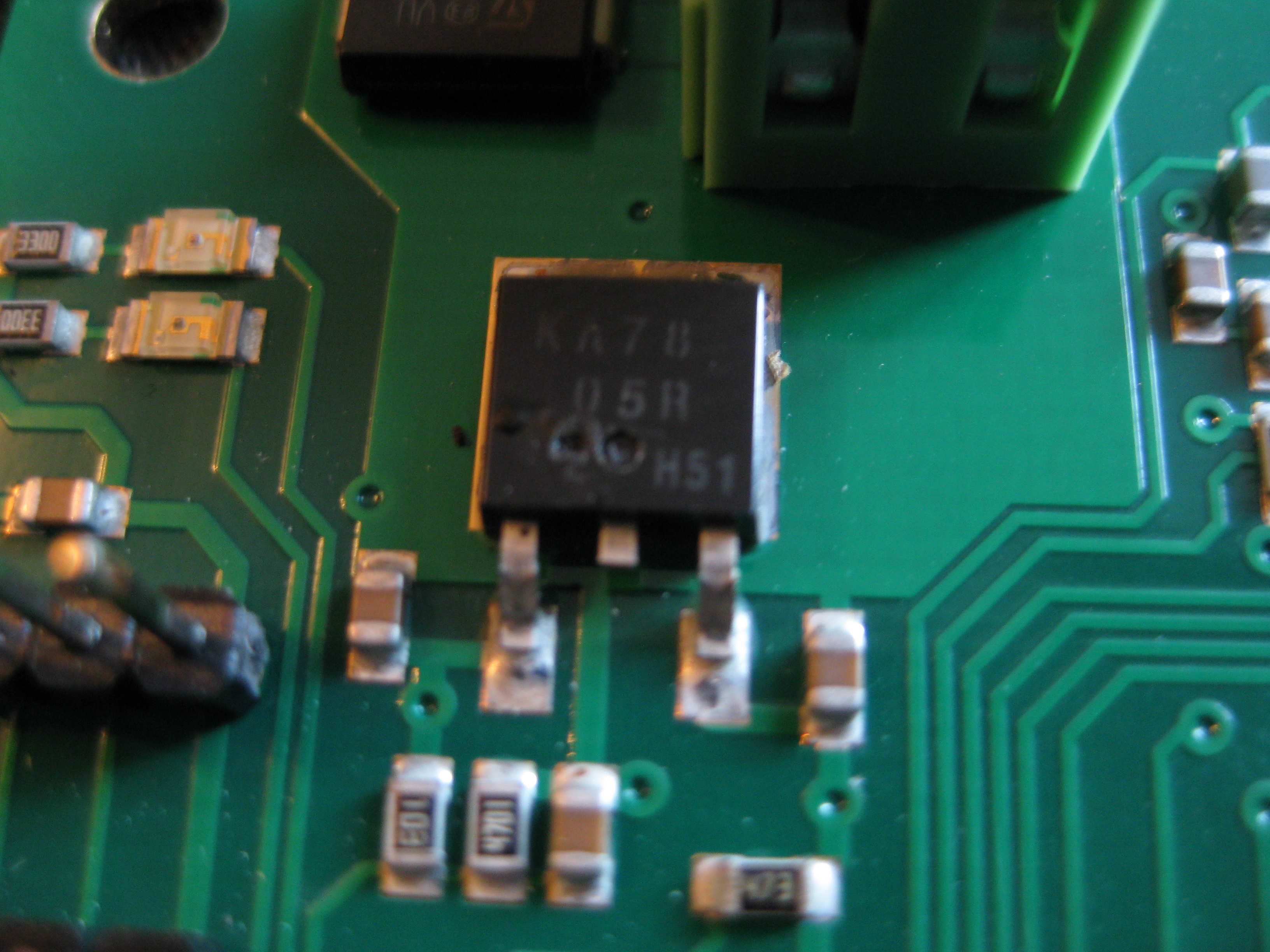
Ma foi, si quelqu'un a de l'aide à m'apporter, je poste des photos de la carte cramée :
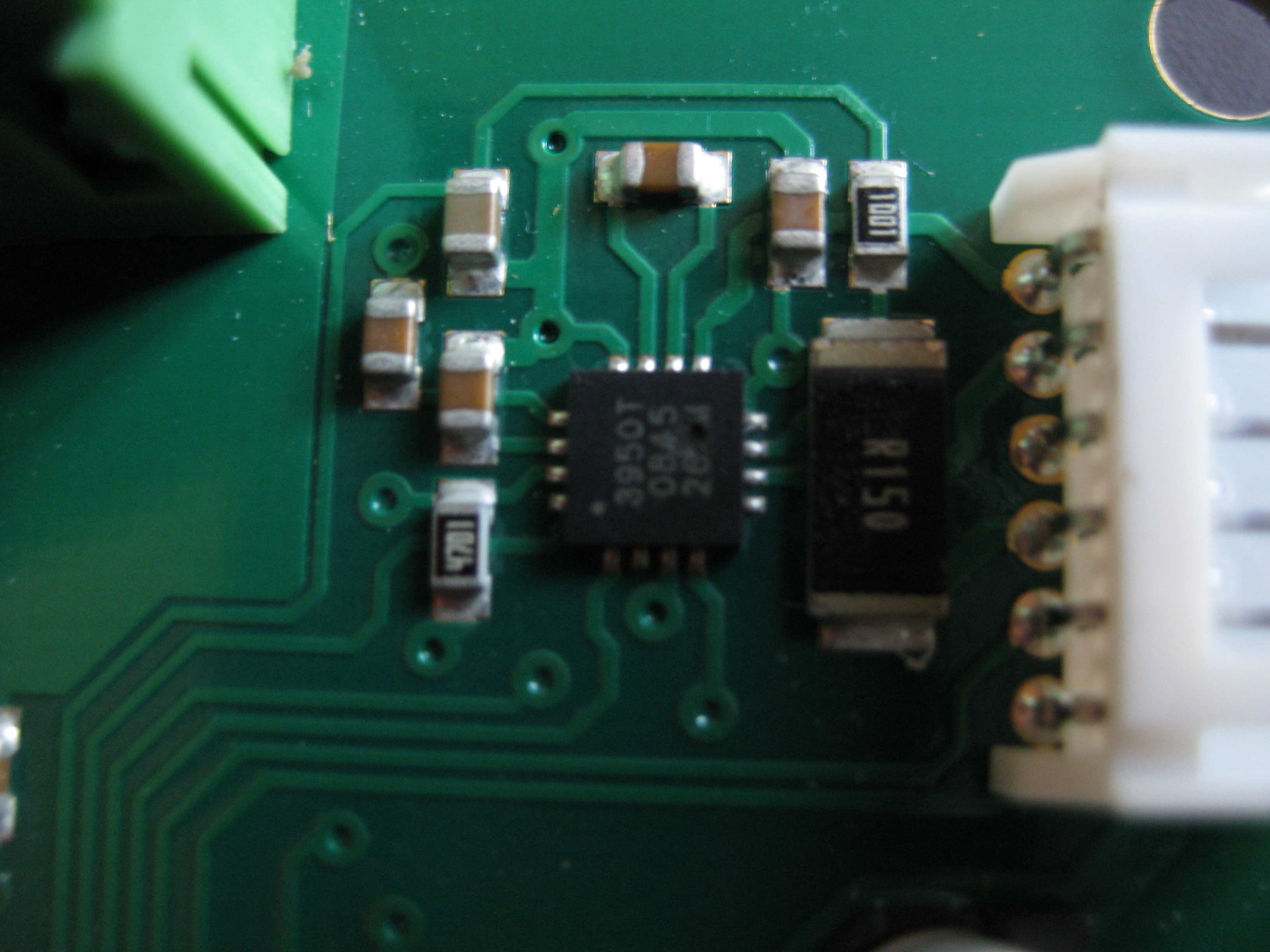
Une photo d'un autre composant mort:
Bon , j'en ai immédiatement commandé un, je fais donc une pause pour le moment, je ne sais combien de temps va mettre la livraison de la carte.
Je vais attaquer la partie tourelle cette après midi.
EDIT : Le régulateur de l'Arduino à mangé sévère aussi, l'alimentation de l'arduino ne peut s'effectuer maintenant que part le +5v régulé sur la carte. Et un duemilanove, un !
EDIT2 : Je met à disposition la carte de commande des moteurs, je l'envoie gratis, tout les composants ayant mangé son : un 7805, deux pont en H CMS, la résistance CMS "r150" est elle aussi touché sur les deux circuits de contrôle, le pic va bien (protégé par quelques diodes). Interpellez moi via MP pour conclure le don, vous le recevrez dans une simple lettre.
Gros gros problème ce matin, erreur d'inattention pendant le câblage, le contrôleur de moteur est mort, régulateur 5v H.S.
Vu son prix, je pense que mon projet va me couter du pognon.
Étant donné que je n'ai pas pu dessouder le composant, je ne peut donc pas le réparer.
Ma foi, si quelqu'un a de l'aide à m'apporter, je poste des photos de la carte cramée :
Une photo d'un autre composant mort:
Bon , j'en ai immédiatement commandé un, je fais donc une pause pour le moment, je ne sais combien de temps va mettre la livraison de la carte.
Je vais attaquer la partie tourelle cette après midi.
EDIT : Le régulateur de l'Arduino à mangé sévère aussi, l'alimentation de l'arduino ne peut s'effectuer maintenant que part le +5v régulé sur la carte. Et un duemilanove, un !
EDIT2 : Je met à disposition la carte de commande des moteurs, je l'envoie gratis, tout les composants ayant mangé son : un 7805, deux pont en H CMS, la résistance CMS "r150" est elle aussi touché sur les deux circuits de contrôle, le pic va bien (protégé par quelques diodes). Interpellez moi via MP pour conclure le don, vous le recevrez dans une simple lettre.
Image(s) jointe(s)


#5
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 02 avril 2011 - 06:39
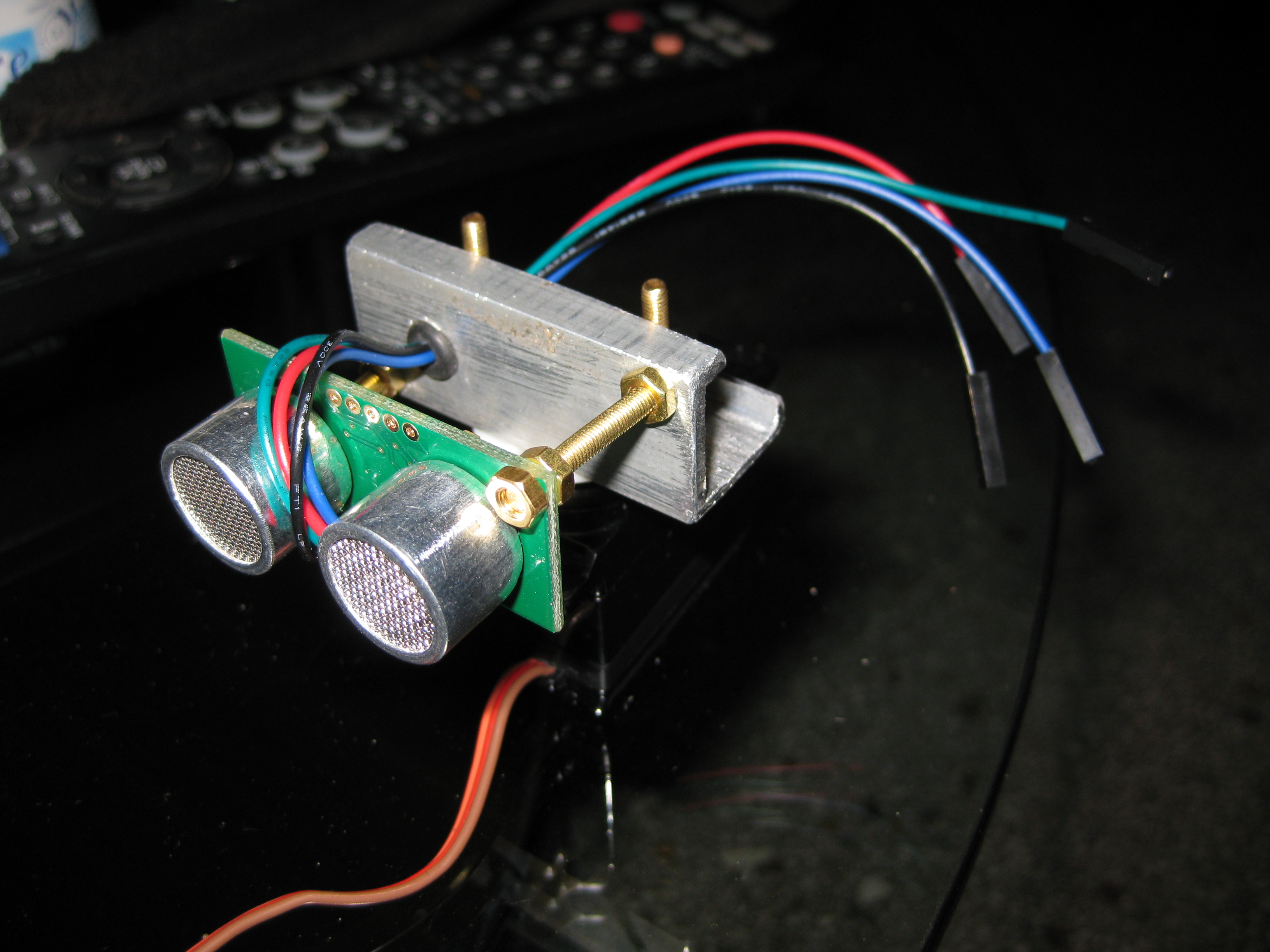
Bon du coup au vu du changement de dernière minute (cramage du MD25).
J'ai confectionner une tourelle à un axe de rotation.
Voici la photo :
Et une petite vidéo :
http://www.youtube.com/watch?v=FIRqJGus_FM
J'ai confectionner une tourelle à un axe de rotation.
Voici la photo :
Et une petite vidéo :
http://www.youtube.com/watch?v=FIRqJGus_FM
Image(s) jointe(s)

#7
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 02 avril 2011 - 08:28
Tu es sur que tes trucs ont cramé ? Il s'est passé quoi ? Tu as mal alimenté ?
J'ai inversé la polarité en discutant avec quelqu'un, au moment de branché le bouzin.
Donc le 7805 à cramer immédiatement, je me suis dit : merde !
Je remet les bonnes polarité, teste la sortie du régu : 3.02 2.68 2.54 3.45 4.02 1.25 V etc ... Le régu est donc cramé mais la carte marche.
Je débranche pour laissé reposer (il y'avait de la fumée qui s'échapper encore du couvercle au moment là).
Je rebranche, clignotement de la LED sur le contrôleur et sur l'arduino.
Je constate le trou dans le régulateur.
Suite à ça je démonte des appareils pour trouver un régulateur 7805 et là je constate les pont en H cramé eux aussi (trou distinct au même endroit sur les deux ponts) ainsi que deux résistor "R150".
Donc la carte de contrôle est morte et bien morte.
#8
Jbot
-

- Membres
-

- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 02 avril 2011 - 08:35
Résultat des courses, ne pas papotter quand on branche une alim 
C'est dommage de l'avoir cramée... Ton arduino marche quand même ?
C'est dommage de l'avoir cramée... Ton arduino marche quand même ?
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
#9
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 02 avril 2011 - 08:50
Résultat des courses, ne pas papotter quand on branche une alim
C'est dommage de l'avoir cramée... Ton arduino marche quand même ?
Prochain coup j'éviterais de discuter !

Il fonctionne en USB et en 5V, la prise 7-12 V ronde ne permet pas de faire fonctionner des servos, je ne sais pas pourquoi.
Le truc de l'alim n'aurait pas pu arriver si j'avais eu le matos à temps pour protéger l'installation (livraison lente d'une boutique en ligne).Je pense vraiment qu'un fusible m'aurait sauver.
Mais, prochaine fois que je branche le matos, je ferais attention, c'est sûr. Ceci à faillit me faire stopper la robotique. Mais je persiste.
Il faut dire que 12v 7Ah dans les chicots, la carte n'a pas dû aimer, ni l'Arduino je pense. J'ai commander un arduino uno pour l'intégration finale dans le robot, je ferais les tests avec la Duemilanove par sécurité.
#10
Esprit
-

- Membres
-
- 1â¯503 messages
Membre chevronné
- Gender:Male
- Location:Belgique
- Interests:La robotique !
Posté 06 avril 2011 - 07:39
Courage, c'est le genre de choses qui arrive à tout le monde. J'ai moi-même cramé un AOP en classe vendredi. Pareil, erreur d'inattention, j'ai mis l'AOP à l'envers... (le repère dans le mauvais sens...). Et oui, on se sent bête dans ces moments là... 
Mais je pense que ça fait partie de l'apprentissage de tout électronicien. Après tout, que celui qui n'a jamais grillé un composant me jette la première résistance !
Ça arrive et ça permet d'apprendre à faire plus attentions les fois qui suivent.
Bonne chance pour la suite !
Mais je pense que ça fait partie de l'apprentissage de tout électronicien. Après tout, que celui qui n'a jamais grillé un composant me jette la première résistance !
Ça arrive et ça permet d'apprendre à faire plus attentions les fois qui suivent.
Bonne chance pour la suite !
Esprit
*Rêve d'en caser un dans un robot*
#11
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 06 avril 2011 - 09:12
J'aurais sûrement préféré cramer un ampli op, mais là une carte à un prix dont je ne pourrais prononcer la valeure, c'est moins cool.
J'en ai parlé au SAV de la boîte : "La réparation vous coutera probablement plus cher qu'une carte neuve."
Belle réponse que j'attendais un peu, ayant cramé la carte jusqu'aux ponts en H ...
Et encore ! Je n'ai pas tester les moteurs, je crains que les encodeurs soient morts au combat, il y-a 95% de chances.
Je verrais demain, la carte devrait m'être livrée.
En tout cas merci de me remonter un peu le moral.
J'en ai parlé au SAV de la boîte : "La réparation vous coutera probablement plus cher qu'une carte neuve."
Belle réponse que j'attendais un peu, ayant cramé la carte jusqu'aux ponts en H ...
Et encore ! Je n'ai pas tester les moteurs, je crains que les encodeurs soient morts au combat, il y-a 95% de chances.
Je verrais demain, la carte devrait m'être livrée.
En tout cas merci de me remonter un peu le moral.
#12
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 07 avril 2011 - 11:22
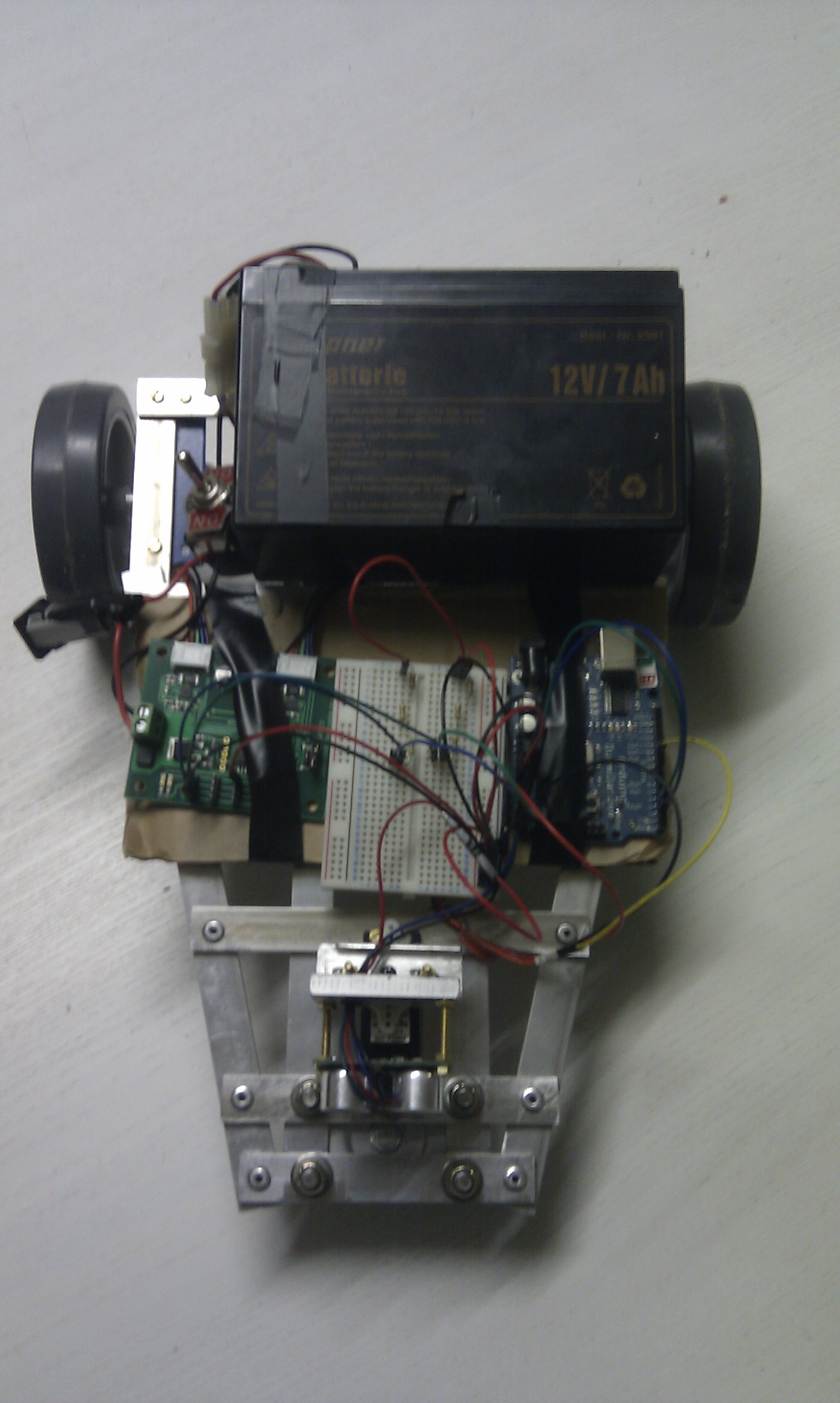
Reprise du projet ce matin, au moment où le facteur m'a filé le colis, j'étais déjà plus ou moins prêt.
J'ai tout installé sur le robot de façon provisoire afin de tester le circuit, ça marche ! Encore heureux, vu le prix que m'aura couté le bouzin, passons ...
Je me suis donc mit le petit bout de programme pour tester le matos. Constat les roues ne tourne pas excessivement vite mais leurs tailles fait que le robot est véloce. Je vais donc baisser la vitesse dans mon programme pérso.
Je me suis donc attelé à programmer la bestiole, premier jet, il roule et s'arrête dés qu'il y-a un obstacle, ce que le code indiquait est globalement respecté.
Je peux donc passer à la phase 2.
Je me suis pencher sur la détection d'obstacle après quelques tâtonnements je suis arrivé à mon but pour aujourd'hui, la tourelle fonctionne, le code est propre, mais il manque quelques choses pour résoudre le dilemme du coin ( compliqué pour tout robot ).
Voici la vidéo montrant le robot à l’œuvre.
http://www.youtube.com/watch?v=LcW04Myhp6c
J'ai tout installé sur le robot de façon provisoire afin de tester le circuit, ça marche ! Encore heureux, vu le prix que m'aura couté le bouzin, passons ...
Je me suis donc mit le petit bout de programme pour tester le matos. Constat les roues ne tourne pas excessivement vite mais leurs tailles fait que le robot est véloce. Je vais donc baisser la vitesse dans mon programme pérso.
Je me suis donc attelé à programmer la bestiole, premier jet, il roule et s'arrête dés qu'il y-a un obstacle, ce que le code indiquait est globalement respecté.
Je peux donc passer à la phase 2.
Je me suis pencher sur la détection d'obstacle après quelques tâtonnements je suis arrivé à mon but pour aujourd'hui, la tourelle fonctionne, le code est propre, mais il manque quelques choses pour résoudre le dilemme du coin ( compliqué pour tout robot
).Voici la vidéo montrant le robot à l’œuvre.
http://www.youtube.com/watch?v=LcW04Myhp6c
Image(s) jointe(s)

#13
Jbot
-
- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 08 avril 2011 - 11:33
J'aime les robots avec du scotch 
C'est un bon début, ca commence a marcher pas mal.
Elle pese combien ta batterie ? Pq ca ne m'a pas l'air leger tout ca ^^
C'est un bon début, ca commence a marcher pas mal.
Elle pese combien ta batterie ? Pq ca ne m'a pas l'air leger tout ca ^^
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
#14
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 08 avril 2011 - 12:53
La batterie pèse à elle seule 2,3 Kg.
Néanmoins sur la vidéo le robot est à 30% de sa vitesse, et des "delay" sont ajouté dans le code pour bien voir les étapes, nécessaire au débuggage.
Il y-a un fort couple, le robot peut tout à fait rouler sur de l'herbe, pas trop haute (tourelle ultrason), avec un relief leger (encore la tourelle).
Ce qui me fait penser à mettre et programmer une vraie tourelle "pan-tilt".
Sinon la batterie tiens super bien, il a fonctionné 3 heures, la batterie est encore à 12,5 V, elle était hélas surchargée à 13v au moment de démarrer le robot. Je ne sais pas si c'est bien pour la batterie. J'ai mis 39 heures à l'a recharger, temps de charge suivant mes calculs (Icharge = 250ma), la prochaine fois j’intercalerais un voltmètre aux bornes de la batterie.
Le premier jet du code me motive pour la suite, le robot réagit pile poil comme je l'ai programmé.
Ma foi, à partir d'aujourd'hui je reprends le travail, je ne pourrais pas m'occuper du robot, vivement ma prochaine semaine de vacances !
Néanmoins sur la vidéo le robot est à 30% de sa vitesse, et des "delay" sont ajouté dans le code pour bien voir les étapes, nécessaire au débuggage.
Il y-a un fort couple, le robot peut tout à fait rouler sur de l'herbe, pas trop haute (tourelle ultrason), avec un relief leger (encore la tourelle).
Ce qui me fait penser à mettre et programmer une vraie tourelle "pan-tilt".
Sinon la batterie tiens super bien, il a fonctionné 3 heures, la batterie est encore à 12,5 V, elle était hélas surchargée à 13v au moment de démarrer le robot. Je ne sais pas si c'est bien pour la batterie. J'ai mis 39 heures à l'a recharger, temps de charge suivant mes calculs (Icharge = 250ma), la prochaine fois j’intercalerais un voltmètre aux bornes de la batterie.
Le premier jet du code me motive pour la suite, le robot réagit pile poil comme je l'ai programmé.
Ma foi, à partir d'aujourd'hui je reprends le travail, je ne pourrais pas m'occuper du robot, vivement ma prochaine semaine de vacances !
#15
Jbot
-
- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 08 avril 2011 - 01:07
T'inquiete pas, c'est normal que ta batterie tienne si longtemps vu la capacité qu'elle a et le peu que tu tires dessus avec juste 2 moteurs.
Moi c'est pareil ma petite batterie LiPo elle dure longtemps (bcp plus que je l'aurais pensé, j'avais l'habitude des vieilles NiMH qui ne tiennent pas).
De toute facon il vaut mieux commencer par un robot qui ne va pas trop vite.
Moi j'ai acceléré mon robot pour les besoin de la coupe mais pas mal de problemes arrivent du coup, tu fonce dans le mur trés vite et t'explose tout sans avoir le temps de réagir, tes capteurs ont du mal a suivre la vitesse etc... pour le débug ce n'est pas simple en effet ^^
Moi c'est pareil ma petite batterie LiPo elle dure longtemps (bcp plus que je l'aurais pensé, j'avais l'habitude des vieilles NiMH qui ne tiennent pas).
De toute facon il vaut mieux commencer par un robot qui ne va pas trop vite.
Moi j'ai acceléré mon robot pour les besoin de la coupe mais pas mal de problemes arrivent du coup, tu fonce dans le mur trés vite et t'explose tout sans avoir le temps de réagir, tes capteurs ont du mal a suivre la vitesse etc... pour le débug ce n'est pas simple en effet ^^
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
#16
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 08 avril 2011 - 03:28
Comme quoi, le calcul théorique et la pratique sont deux choses bien distinctes ...
J'avais calculé pour le pire des cas lors de la commande de la batterie, je me suis dit 7Ah sera parfait pour que le robot fonctionne deux heures à pleine vitesse et en pleine charge en prenant en compte une pente de 5%.
Mon robot roule avec 50% de charge et 30% de vitesse.
Je compte mettre une 3 ou 4Ah ,ça suffira je pense pour le coup.
La batterie de 2kg va finir par user les réducteurs,je pense, j'ai pas envie de payer les vacances des mecs de devantech.
En tout cas,j'ai vraiment hâte de revenir sur le projet, en attendant je nettoie le code et je le commente, voilà tout ce que je vais pouvoir produire les prochains 10-15 jours, autant dire que j'ai les glandes.
Vraiment marre de bosser à Pétaouchnok-Les-Deux-Eglises !
J'avais calculé pour le pire des cas lors de la commande de la batterie, je me suis dit 7Ah sera parfait pour que le robot fonctionne deux heures à pleine vitesse et en pleine charge en prenant en compte une pente de 5%.
Mon robot roule avec 50% de charge et 30% de vitesse.
Je compte mettre une 3 ou 4Ah ,ça suffira je pense pour le coup.
La batterie de 2kg va finir par user les réducteurs,je pense, j'ai pas envie de payer les vacances des mecs de devantech.
En tout cas,j'ai vraiment hâte de revenir sur le projet, en attendant je nettoie le code et je le commente, voilà tout ce que je vais pouvoir produire les prochains 10-15 jours, autant dire que j'ai les glandes.
Vraiment marre de bosser à Pétaouchnok-Les-Deux-Eglises !
#17
Jbot
-
- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 08 avril 2011 - 03:39
Bah emmene ton robot a petaochnok ! Il n'est pas si gros que ca. Au pire t'achete une petite batterie LiPo pour quand tu le déplace. (c'est sur que la batterie au plomb tu la sent passer ). Mes LiPo font 10 fois moins de poids que ta batterie et seulement 2 fois moins de capacité, c'est rentable (en plus tes arbres moteurs souffriront moins)
). Mes LiPo font 10 fois moins de poids que ta batterie et seulement 2 fois moins de capacité, c'est rentable (en plus tes arbres moteurs souffriront moins)
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
#18
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 08 avril 2011 - 06:47
Je pense que je vais suivre ton conseil, je vais aller me prendre une LiPo avec son chargeur, je me demande maintenant pourquoi avoir choisit le plomb ... A oui ! Pour mon portefeuille !
La LiPo reste chère, mais vu les performances, y'a pas photo !
Sinon pour en revenir au robot en lui même, il faut que je lui trouve une carrosserie, j'ai chercher un peu, j'ai pensé au plexi avec des entretoises, au lexan mais je ne peut pas le mouler, au plastique mais je ne voit pas comment faire exactement, quelqu'un aurait-il un matériaux intéressant financièrement et facile à travailler ?
La LiPo reste chère, mais vu les performances, y'a pas photo !
Sinon pour en revenir au robot en lui même, il faut que je lui trouve une carrosserie, j'ai chercher un peu, j'ai pensé au plexi avec des entretoises, au lexan mais je ne peut pas le mouler, au plastique mais je ne voit pas comment faire exactement, quelqu'un aurait-il un matériaux intéressant financièrement et facile à travailler ?
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




