
Beau travail !!
Pour ta coque, as tu pensé au thermoformage maison ? J'avais trouvé cette technique en parcourant des sites d'aéromodélisme ! Par contre il faut que t'ai un four suffisamment grand, ou du moins de la taille de ta bête !
J'avais trouvé un site super, mais je ne l'ai pas retrouvé, alors je te sors celui là !
C'est une idée comme ça, peut être que c'est pas la meilleur mais c'est pas lourd du tout et apparemment facile à faire !
Bon courage !

53 réponses à ce sujet
#22

ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 10 avril 2011 - 03:51
Merci pour le tuyau !
J'ai pas bien compris comment il place la plaque de plexi chaude sur le "master".
Mais sinon ça à l'air d'être vraiment bien, le master à l'air complexe à réaliser, j'ai pas l'habitude de ce genre de chose.
Je vais voir ça de plus près, j'ai le four qui convient dans tout les cas, c'est déjà un début.
J'ai vraiment hâte de finir ce robot.
J'ai pas bien compris comment il place la plaque de plexi chaude sur le "master".
Mais sinon ça à l'air d'être vraiment bien, le master à l'air complexe à réaliser, j'ai pas l'habitude de ce genre de chose.
Je vais voir ça de plus près, j'ai le four qui convient dans tout les cas, c'est déjà un début.
J'ai vraiment hâte de finir ce robot.
#23
Guiguite89
-

- Membres
- 61 messages
Membre
- Gender:Male
Posté 10 avril 2011 - 04:26
C'est à peu près ça ouais !
Tu fais au début ton "master" pour cela il faut que tu trouve un moyen "d'usiner" la forme que tu veux ! c'est possible de le faire dans de la mousse de polyuréthane (par exemple) à la scie, au couteau, puis au papier de verre ! C'est là le plus compliquer de la chose !
Ensuite, tu fait un cadre en bois ou tu tends ta plaque de plastique (certain plastique réagissent mieux au thermoformage que d'autre). Tu le mets au four (120° d'après certain sites), tu attends que ça ramollisse, tu la sors rapidement et tu va l'appliquer sur ton master pour que le plastique épouse sa forme. Tu attends suffisamment longtemps (10 min !) pour que le plastique soit dur avant de relever ta plaque.
Le caisson en dessous est là pour faire le vide grâce à un aspirateur (ton master devra être percée de tout petits trous pour que ça épouse bien la forme)
Je vais essayer de te retrouver le super lien que j'avais, mais je t'invite à parcourir les forum de modélisme, ils en parlent souvent.
en attendant !
Tu fais au début ton "master" pour cela il faut que tu trouve un moyen "d'usiner" la forme que tu veux ! c'est possible de le faire dans de la mousse de polyuréthane (par exemple) à la scie, au couteau, puis au papier de verre ! C'est là le plus compliquer de la chose !
Ensuite, tu fait un cadre en bois ou tu tends ta plaque de plastique (certain plastique réagissent mieux au thermoformage que d'autre). Tu le mets au four (120° d'après certain sites), tu attends que ça ramollisse, tu la sors rapidement et tu va l'appliquer sur ton master pour que le plastique épouse sa forme. Tu attends suffisamment longtemps (10 min !) pour que le plastique soit dur avant de relever ta plaque.
Le caisson en dessous est là pour faire le vide grâce à un aspirateur (ton master devra être percée de tout petits trous pour que ça épouse bien la forme)
Je vais essayer de te retrouver le super lien que j'avais, mais je t'invite à parcourir les forum de modélisme, ils en parlent souvent.
en attendant !
#24
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 10 avril 2011 - 06:31
C'est un très bon moyen certes, pas très compliqué à mettre en œuvre, mais je ne sais pas si je vais sauté le pas pour autant. Je ne sais pas si j'ai besoin d'une carrosserie aussi parfaite.
Un bout de plexi, des tiges filetées et c'est dans la poche. Je sais, ça fait feignant, mais je ne me vois pas construire cette machine à thermoformage pour le moment, je manque de temps.
Je vais chercher du coté des vieux bacs à légumes de frigo, 4 trous, 4 tiges filetées, des écrous et c'est nikel. Non ?
Je garde en tout cas la technique, je l'emploierait pour l'autre robot je pense (plus petit), ça me laisse le temps de faire la machine, si possible avec le système de vide d'air intégré (ayant un ou deux aspirateurs encrassés et bruyants).
Un bout de plexi, des tiges filetées et c'est dans la poche. Je sais, ça fait feignant, mais je ne me vois pas construire cette machine à thermoformage pour le moment, je manque de temps.
Je vais chercher du coté des vieux bacs à légumes de frigo, 4 trous, 4 tiges filetées, des écrous et c'est nikel. Non ?
Je garde en tout cas la technique, je l'emploierait pour l'autre robot je pense (plus petit), ça me laisse le temps de faire la machine, si possible avec le système de vide d'air intégré (ayant un ou deux aspirateurs encrassés et bruyants).
#26
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 11 avril 2011 - 05:13
Belle initiative que de le faire partager, je te souhaite du courage pour la rédaction.
La construction de mon robot reprend demain, je suis de nouveau en vacances (non prévue), ça tombe bien !
La construction de mon robot reprend demain, je suis de nouveau en vacances (non prévue), ça tombe bien !
#27
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 13 avril 2011 - 05:27
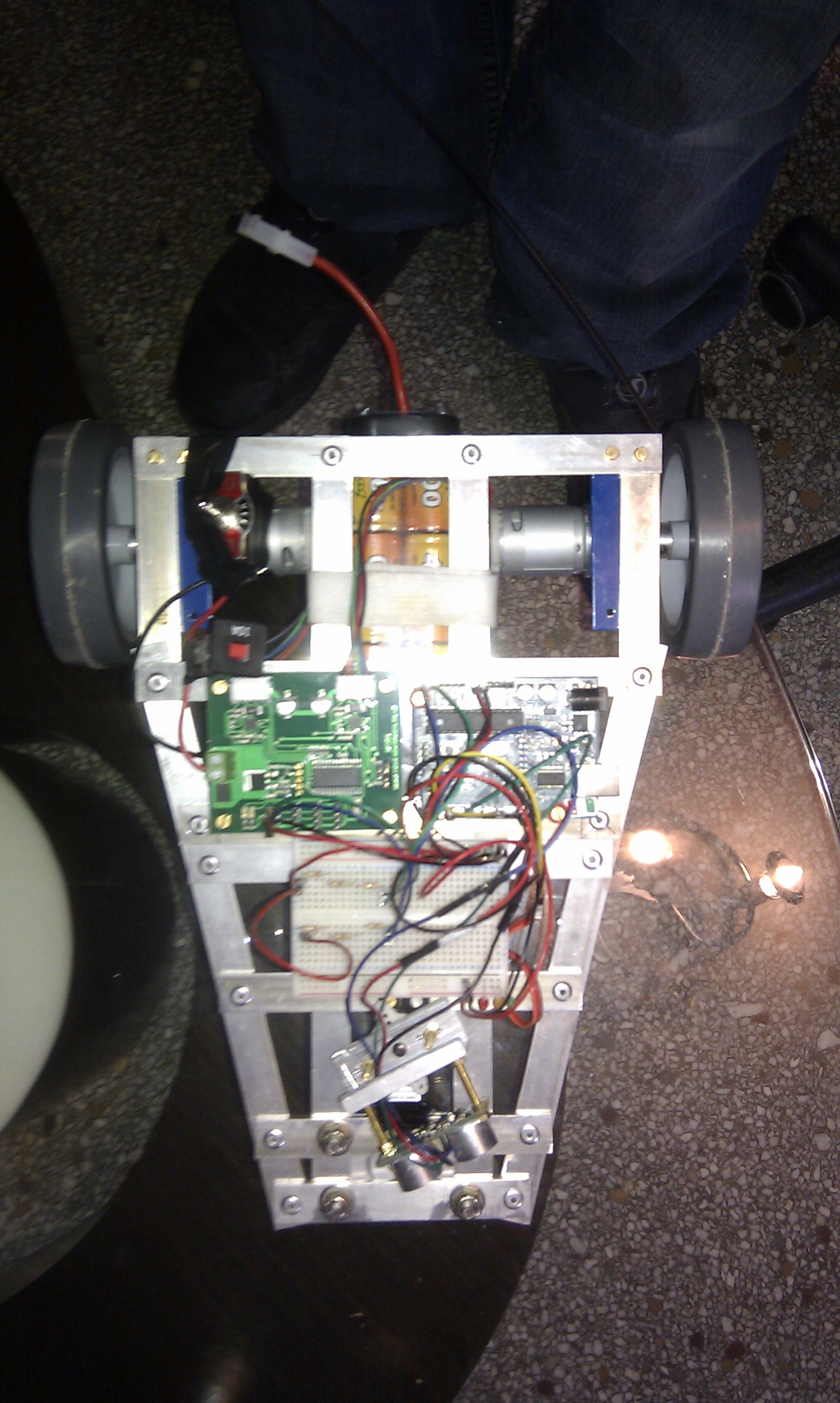
Reprise du projet ce matin, honnêtement j'ai pas pu faire grand chose à part mettre les circuits sur entretoises.
Ca fait beaucoup plus propre qu'avant, il me faut encore faire le "bac" pour la batterie et surtout trouver une solution low-cost pour la carrosserie, je suis toujours à la recherche du bac à légumes.
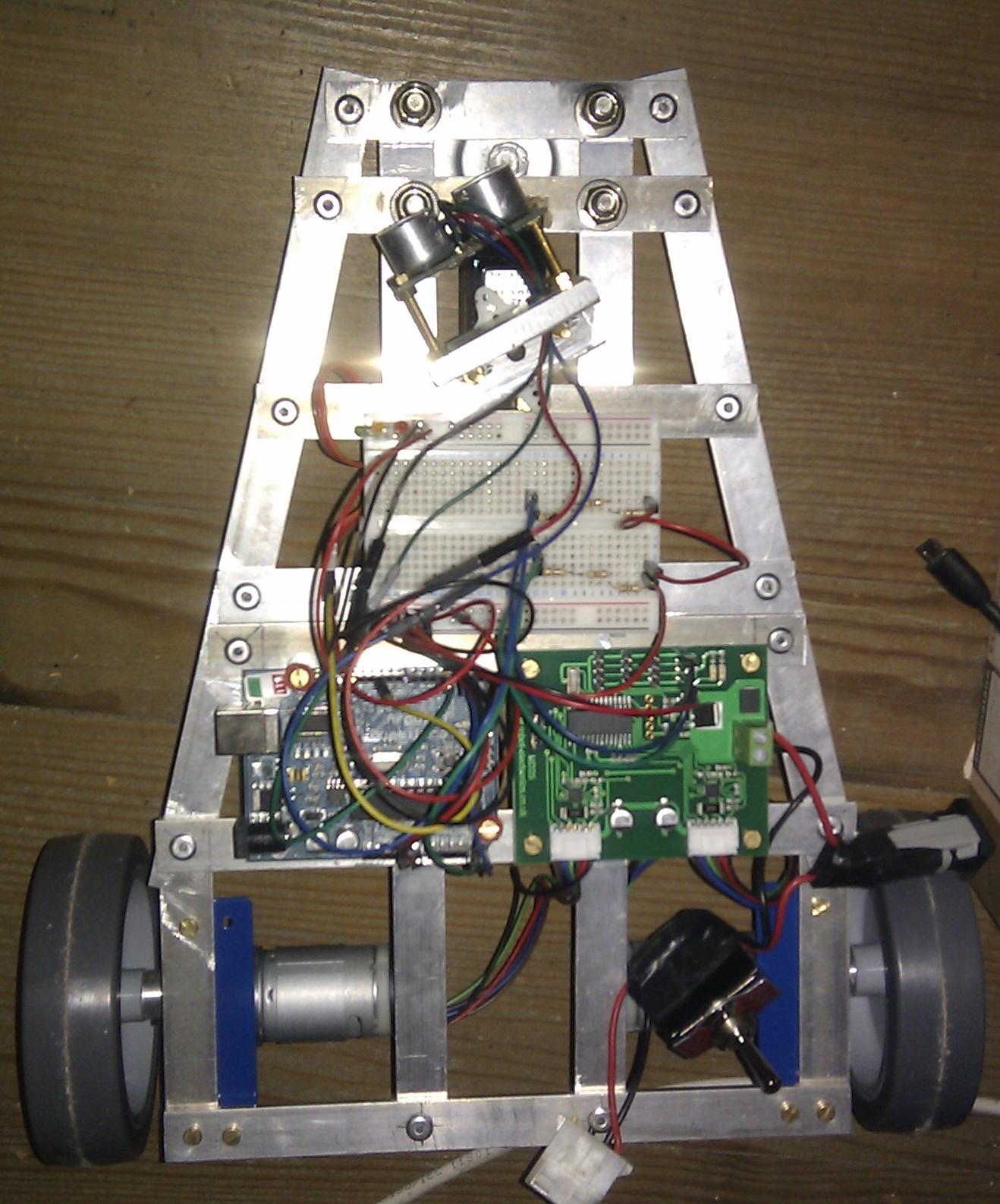
Sinon concernant son comportement, j'ai du mal à éviter qu'il n'entre en collision avec les murs, j'ai l'impression que souvent, lorsque l'obstacle est trop prés, le robot pète un boulon et continue tout droit, avec tout les problèmes que ça engendre : coups dans les cartes, les straps, la tourelle ...
J'ai remarqué que souvent ça lui arrivait prés d'un meuble à "patte", ou le robot passe mais pas le matériel, ou lorsque qu'il circule prés d'un mur (en raison de la portée du capteur en "goutte d'eau").
J'ai donc décidé de recourir à deux capteurs ir SHARP GP2D120, j’espère que c'est le bon choix, n'ayant pas posé de questions au préalable ... Qu'en pensez-vous ?

Je compte améliorer son comportement grâce a ces capteurs.
Ca fait beaucoup plus propre qu'avant, il me faut encore faire le "bac" pour la batterie et surtout trouver une solution low-cost pour la carrosserie, je suis toujours à la recherche du bac à légumes.
Sinon concernant son comportement, j'ai du mal à éviter qu'il n'entre en collision avec les murs, j'ai l'impression que souvent, lorsque l'obstacle est trop prés, le robot pète un boulon et continue tout droit, avec tout les problèmes que ça engendre : coups dans les cartes, les straps, la tourelle ...
J'ai remarqué que souvent ça lui arrivait prés d'un meuble à "patte", ou le robot passe mais pas le matériel, ou lorsque qu'il circule prés d'un mur (en raison de la portée du capteur en "goutte d'eau").
J'ai donc décidé de recourir à deux capteurs ir SHARP GP2D120, j’espère que c'est le bon choix, n'ayant pas posé de questions au préalable ... Qu'en pensez-vous ?
Je compte améliorer son comportement grâce a ces capteurs.
Image(s) jointe(s)

#28
Jbot
-

- Membres
-

- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 13 avril 2011 - 10:55
Les capteurs sharp sont pas mal dans un environnement pas trop pollué (chez toi c'est trés bien). Par contre dés qu'il commence a y avoir des spots lumineux, ca devient vite du n'importe quoi les valeurs lues...
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
#29
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 14 avril 2011 - 09:17
Merci pour les petites précisions, ce robot ne sortira pas normalement, il restera chez moi, par contre je ne sais pas du tout comment coder avec ces capteurs là, comparer aux ultra sons, c'est pas la même.
#30
Jbot
-
- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 14 avril 2011 - 09:27
C'est pas trés compliqué.
Aprés il faut juste convertir en distance.
Voila en gros
int sensorValue = 0;
sensorValue = analogRead(0); // La pinAprés il faut juste convertir en distance.
double distance = (2914 / (sensorValue + 5)) - 1;
Voila en gros
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
#31
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 14 avril 2011 - 09:34
Ok ! On "lit" une valeure analogique et on l'a converti ...
En gros c'est plus facile que l'ultrason, pas besoin de solliciter la mesure pour avoir une valeure.
Ça devrait aller alors !
Merci pour le bout de code !
En gros c'est plus facile que l'ultrason, pas besoin de solliciter la mesure pour avoir une valeure.
Ça devrait aller alors !
Merci pour le bout de code !
#32
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 14 avril 2011 - 09:04
Aujourd'hui le robot a perdu 2 Kg !
J'ai décidé en ce jour de changer d'accu, j'ai troqué ma batterie au plomb contre un batterie NiMh (pas taper !), n'ayant pas les moyens pour passer au LiPo, je me rabats sur le NiMh.
J'ai donc acheter un pack de 8 éléments A²PRO le magasin n'ayant plus de pack de 10, j'ai du compléter avec deux éléments de même type et remettre l'accu sous gaine, croyez-moi ou non : ce n'est pas simple avec un fer à souder de 40W ...
Et comme si c'était calculé au centième de millimètre, la batterie passe entre les deux chevrons du châssis et les deux moteurs, deux velcros font très bien l'affaire pour maintenir le tout. De plus la batterie tiens en butée sur le servomoteur. Quand je dis que c'est au centième, je suis pas loin de la vérité !
Le voilà débarrassé d'un poids conséquent !
Sinon aujourd'hui j'ai découvert un problème avec le capteur à ultrasons, je ne sais pas si c'est grave ou pas, c'est pour ça que je le soumet ici, au cas où quelqu'un détenant la réponse passerait par là.
Le capteur à l'air de retourner des fausses informations et ce aléatoirement, je m'explique :
J'ai laissé le robot sur un banc, face à un mur, pour décharger les accus avant la première charge.
J'ai donc laissé tourné les roues dans le vide pendant 1 ou 2 heures.
Et plusieurs fois le robot a entamé une séquence d'évitement d'objet alors qu'il n'avait pas bougé du banc et que la distance avec le mur n'avait pas changé non plus.
J'ai donc pensé à un bug dans le code : rien à signaler.
Un mauvais contact ? Non.
Des "pics" dans le signal ? Je n'ai pas d’oscilloscope ...
J'ai remarqué que de temps à autres la LED placé sur le capteur à ultrasons ne clignotait pas à la même vitesse que d'habitude à l'approche d'un des bugs.
Cela pourrait être des soucis d'alimentation ? J'ai quelques condensateurs sous la main, des 100nF.
Dois-je en mettre un entre les bornes + et - du capteur ? Comme un Sharp IR ?
Si quelqu'un a une idée à me soumettre !
J'ai décidé en ce jour de changer d'accu, j'ai troqué ma batterie au plomb contre un batterie NiMh (pas taper !), n'ayant pas les moyens pour passer au LiPo, je me rabats sur le NiMh.
J'ai donc acheter un pack de 8 éléments A²PRO le magasin n'ayant plus de pack de 10, j'ai du compléter avec deux éléments de même type et remettre l'accu sous gaine, croyez-moi ou non : ce n'est pas simple avec un fer à souder de 40W ...
Et comme si c'était calculé au centième de millimètre, la batterie passe entre les deux chevrons du châssis et les deux moteurs, deux velcros font très bien l'affaire pour maintenir le tout. De plus la batterie tiens en butée sur le servomoteur. Quand je dis que c'est au centième, je suis pas loin de la vérité !
Le voilà débarrassé d'un poids conséquent !
Sinon aujourd'hui j'ai découvert un problème avec le capteur à ultrasons, je ne sais pas si c'est grave ou pas, c'est pour ça que je le soumet ici, au cas où quelqu'un détenant la réponse passerait par là.
Le capteur à l'air de retourner des fausses informations et ce aléatoirement, je m'explique :
J'ai laissé le robot sur un banc, face à un mur, pour décharger les accus avant la première charge.
J'ai donc laissé tourné les roues dans le vide pendant 1 ou 2 heures.
Et plusieurs fois le robot a entamé une séquence d'évitement d'objet alors qu'il n'avait pas bougé du banc et que la distance avec le mur n'avait pas changé non plus.
J'ai donc pensé à un bug dans le code : rien à signaler.
Un mauvais contact ? Non.
Des "pics" dans le signal ? Je n'ai pas d’oscilloscope ...
J'ai remarqué que de temps à autres la LED placé sur le capteur à ultrasons ne clignotait pas à la même vitesse que d'habitude à l'approche d'un des bugs.
Cela pourrait être des soucis d'alimentation ? J'ai quelques condensateurs sous la main, des 100nF.
Dois-je en mettre un entre les bornes + et - du capteur ? Comme un Sharp IR ?
Si quelqu'un a une idée à me soumettre !
Image(s) jointe(s)


#33
skyhack
-

- Membres
-
- 885 messages
Membre passionné
- Gender:Male
- Location:Racourt et Flaba (08)
- Interests:Synthé, modélisation mécanique, bricolage divers, VTT enduro
Posté 14 avril 2011 - 09:49
Attention et c'est peut-être là la cause de ton problème !
Les capteurs IR dont les sharp (j'en ai un en stock qui dort ^^) ont horreur de la lumière du jour dehors et aussi et surtout des lampes halogènes !
Du coup tu a peut-être fait les tests sous la lumière d'un halogène ou autre, ce qui t'a fait perturber ton capteur ...
En espérant t'avoir aidé.
skyhack.
Les capteurs IR dont les sharp (j'en ai un en stock qui dort ^^) ont horreur de la lumière du jour dehors et aussi et surtout des lampes halogènes !
Du coup tu a peut-être fait les tests sous la lumière d'un halogène ou autre, ce qui t'a fait perturber ton capteur ...
En espérant t'avoir aidé.
skyhack.
" Monsters are real. Ghosts are real too.
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
They live inside us and sometimes they win."
-------------Stephen King.------------------
" le fait que les extraterrestres étaient amis avec les Mayas ne signifie pas qu'ils sont nos amis ... "
-------------------------------------Stephen Hawking----------------------------------------------------
#35
Leon
-

- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 15 avril 2011 - 06:43
Est-ce que tu as bien prévu de NE PAS prendre en compte les données du sonar si elles sont abhérentes? Genre s'il te renvoie FF, 00, ou que la communication I2C n'est pas acquittée par le sonar, ou alors que la mesure sonar est beaucoup trop faible...
En général, ça permet d'éliminer pas mal de problèmes.
Leon.
En général, ça permet d'éliminer pas mal de problèmes.
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#36
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 15 avril 2011 - 12:42
Je ne l'ai pas précisé mais c'est un sonar sans I2C, il possède un "trigger" et un "echo".
Je ne sais pas comment éliminé les aberrations du signal.
Néanmoins Léon, tu m'as mis sur une piste, je vais chercher par là.
Je ne sais pas comment éliminé les aberrations du signal.
Néanmoins Léon, tu m'as mis sur une piste, je vais chercher par là.
#37
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 15 avril 2011 - 10:17
Donc Léon, comment t'y prendrais-tu pour "filtrer" le signal d'un SRF05 ?
J'aimerais éliminer les aberrations au début entre 0 et 4 cm ainsi que limiter ça longueur à disons un mètre.
J'aimerais éliminer les aberrations au début entre 0 et 4 cm ainsi que limiter ça longueur à disons un mètre.
#38
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 16 avril 2011 - 04:18
Ca me parait très facile à faire: tu ne fais rien si tu lis des mesures entre 0 et 4cm.
Donc tu ne considères qu'il y a un obstacle que si tu mesures entre 4cm et 30cm (par exemple). C'est juste un ET à rajouter dans une condition.
Leon.
Donc tu ne considères qu'il y a un obstacle que si tu mesures entre 4cm et 30cm (par exemple). C'est juste un ET à rajouter dans une condition.
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#39
ANT-001
-
- Membres
- 123 messages
Membre
- Gender:Male
- Location:La premiére à gauche après jupiter.
Posté 16 avril 2011 - 10:05
A l'heure actuelle le robot est programmé comme suit :
Mesurer distance
Distance obstacle < 30
Avancer
Sinon
DETECTER (Droite/Gauche)
Si Distance Droite < Distance Gauche
Aller à gauche
Sinon
Aller à droite
Je ne vois pas où intégrer la fonction ET.
Mesurer distance
Distance obstacle < 30
Avancer
Sinon
DETECTER (Droite/Gauche)
Si Distance Droite < Distance Gauche
Aller à gauche
Sinon
Aller à droite
Je ne vois pas où intégrer la fonction ET.
#40
Leon
-
- Membres
-
- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 16 avril 2011 - 12:28
Si tu mets ça, ça devrait le faire:
Leon.
Mesurer distance
Si Distance obstacle < 30 ET Distance obstacle > 2Avancer
SinonDETECTER (Droite/Gauche)
Si Distance Droite < Distance Gauche ET Distance Droite > 2 ET Distance Gauche > 2Aller à gauche
Sinon Si Distance Droite > Distance Gauche ET Distance Droite > 2 ET Distance Gauche > 2Aller à droite
Sinon continuer à avancer (retour au début)
Leon.
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




