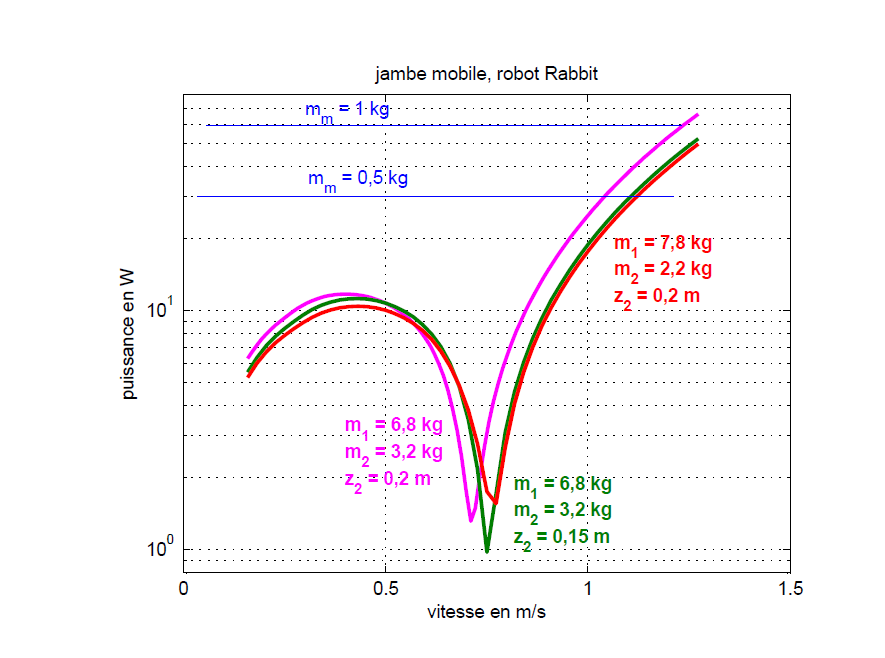
Je suis tombé sur une courbe plus qu’ intéressante sur l'évolution de la puissance consommée par les jambes d'un robot bipède en fonction de la vitesse de ce dernier.
je m’attendais a tomber plus ou moins sur une courbe s’apparentant a une exponentielle... mais pas du tout !
je vous poste la courbe en fichier joint
comment expliquez un tel creux pour une certaine vitesse ?
Il est aisé de faire la comparaison avec l'humain, on a chacun une vitesse de "croisière" pour lequel on se fatigue le moins, mais sur quel phénomènes faut'il s’intéresser pour l'appliquer au robot?
Cordialement