Bonsoir. Hmm.. ton message n'est pas clair sur le problème que tu rencontres. En plus tu cites "ils m'ont dit", j'en déduis que tu as déjà demandé de l'aide et que tu en as déjà obtenue, mais que tu ne veux pas faire l'effort de chercher. Faire appel à Maple pour calculer automatiquement n'est peut être pas la meilleure voie pour comprendre, non ? Bon, on n'est pas là pour être moralisateur. Des éléments de réponses sont ici : https://cours.etsmtl...les/ex3_3_6.zip Bonne chance.
en premier je vous remercie pour votre réponse, mon problème exacte c'est LE CALCUL DE MGI DU ROBOT 5R ( neuromate ). Concernant l'histoire de "ils m'ont dit" c'est un ami qui m'a dit de voir le logiciel MAPEL c'est un logiciel qui peut résoudre les équations mathématique etc... et c'est tous pas plus !! moi je ne connaissais pas ce ce type de logiciel, bon je l'ai cherché, je l'ai installé,
j'ai cherché j'ai trouvé qu'un exemple qui facilite le calcul de MGD, c'est bien malgré que j'aie calculé mon MGD à la main mais mon problème n'est pas encore résolu (MGI =?). avant que je passe à ce ROBOT
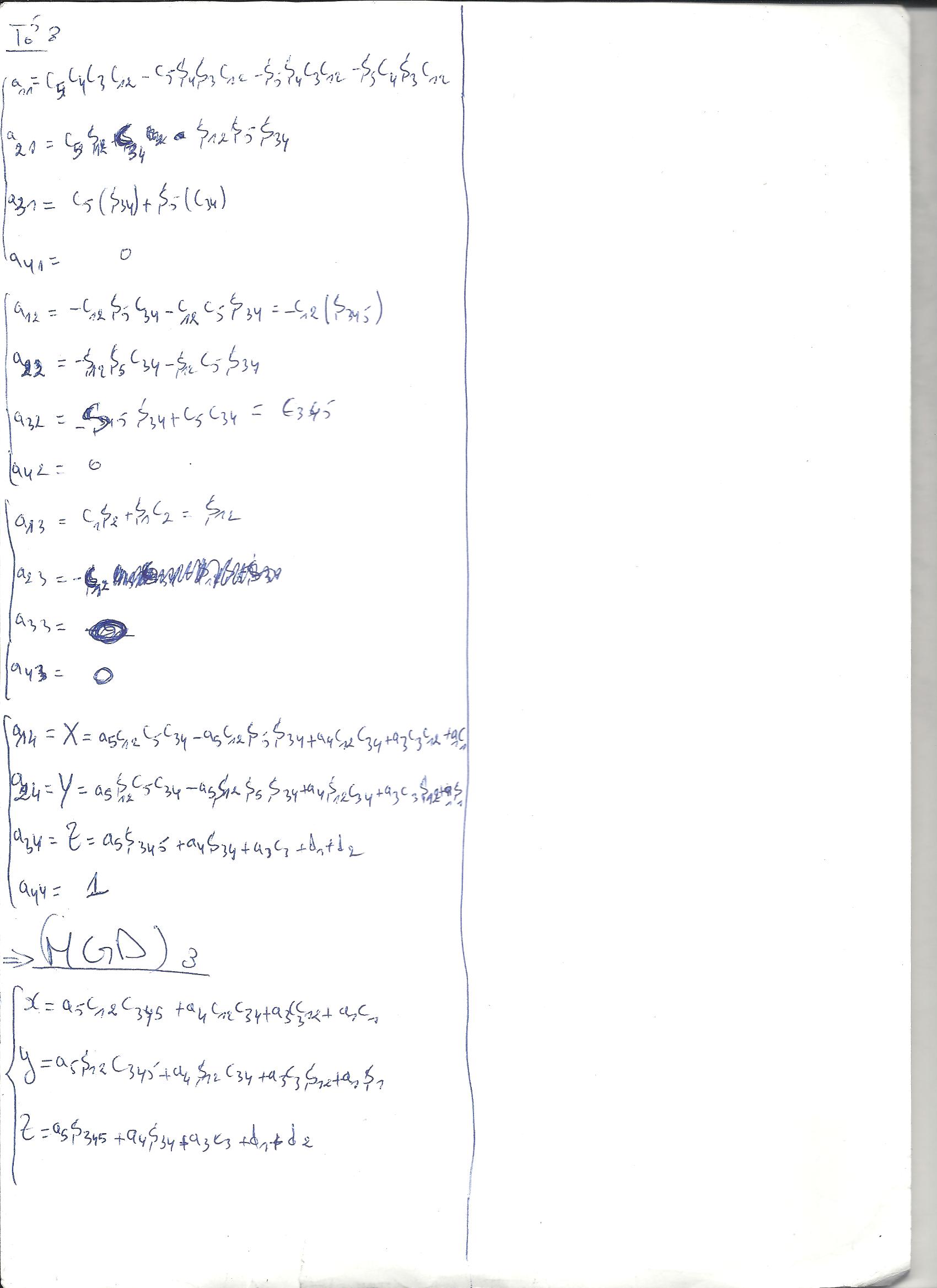
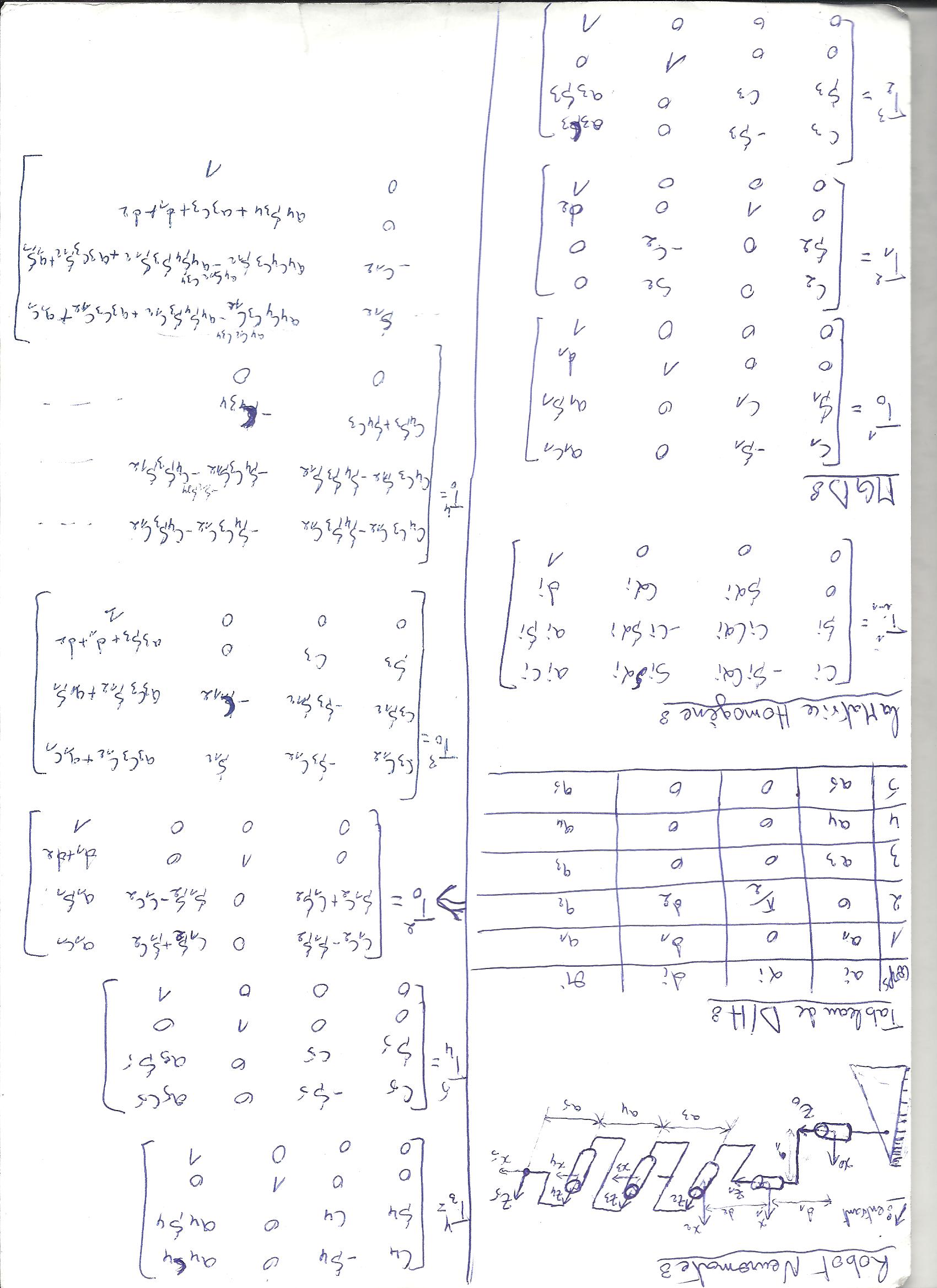
pour bien comprendre j'ai modélisé deux bras manipulateurs 2R et 3R? J'ai calculé tous les modèles géométrique, cinématique et dynamique, direct et inverse, mais les calculs sont devenu plus compliqué en 5R. voici le MGD: (
dernière colonne de la matrice finale T05 [px py pz 1]) X = a5 C12 C345 + a4 C12 C34 + a3 C3 C12 + a1 C1 Y = a5 S12 C345 + a4 S12 C34 + a3 C3 S12 + a1 S1 Z = a5 S345 + a4 S34 + a3 C3 + d1 + d2 on a 3 équations et 5 inconnus Teta1,2,3,4,5 ? SAUF si on utilise les autres colonne de la matrice T05 mais les angles dans le MGI doivent être en fonction de LA POSITION CHOISIE (X,Y,Z) seulement non? J'ai pas pu joindre la feuille scannée de mes calcul de MGD à cause de cette erreur "
Erreur Vous n'avez pas la permission d'envoyer ce type de fichier. "








 :|
:|