

Bonjour les gens ! :D
Après vous avoir
 [/left]
[/left]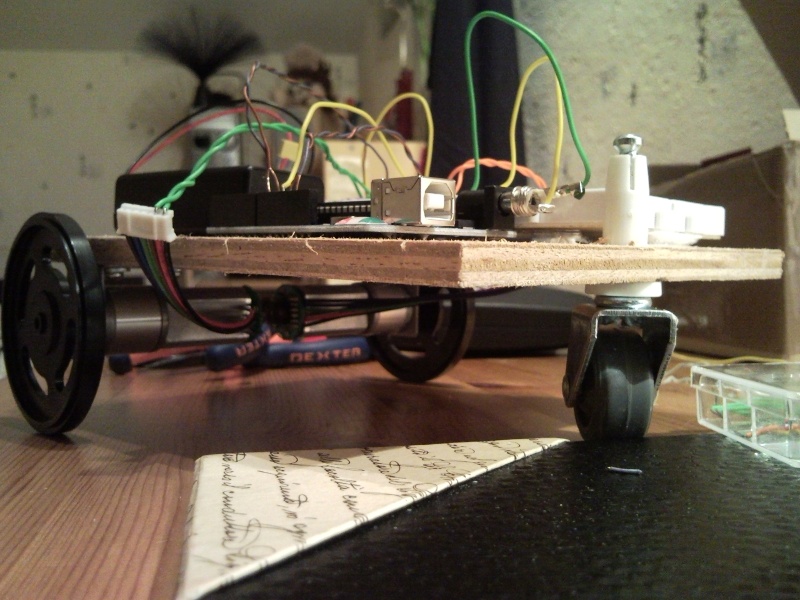 [/left]
[/left]Veuillez noter :
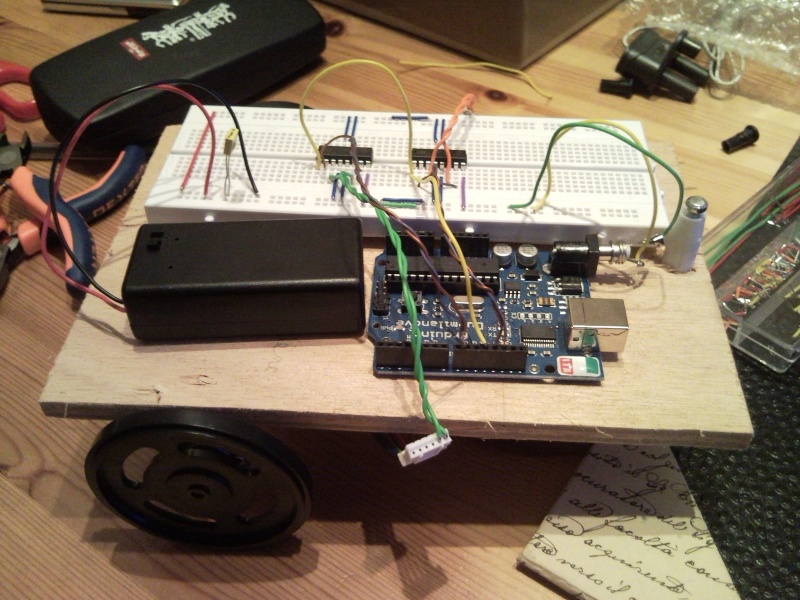
Les ensembles {moteurs + roues} sont à l'avant et la roue libre à l'arrière.
Pour l'instant, tout fonctionne sur plaque d'essais puisque je n'ai pas de quoi faire de carte électronique et je suis encore dans une phase de tests. Mais pour ce que je vous montre, les fonctions motrices fonctionnent parfaitement.
Qu'y a-t-il pour l'instant ?
- Le nom : Je ne sais pas encore :(
- Les actionneurs : 2 moteurs CC (courant continue)
- Les capteurs : Aucun pour l'instant (mis à part des codeurs intégrés aux moteursn mais que je n'exploite pas encore)
- L'électronique : Une carte Arduino + un montage de drivers moteurs (L293D)
- Le châssis : Simple planche en bois pour l'instant (je cherche une vieille console style NES pour faire une structure fun... si vous avez... :tare: )
- Programmation : Pour l'instant, il est juste programmé à avancer, reculer et tourner dans les deux sens...
ATTENTION :
Il manque un élément essentiel sur le montage qui n'est pas négligeable : des radiateurs sur les drivers moteurs ! Vu que je ne le fais tourner que quelques minutes pour les essais, ils ne sont pas nécessaires... mais pour des utilisations un peu plus longues, il ne faut pas les oublier.
Que reste-t-il à faire en priorité ?
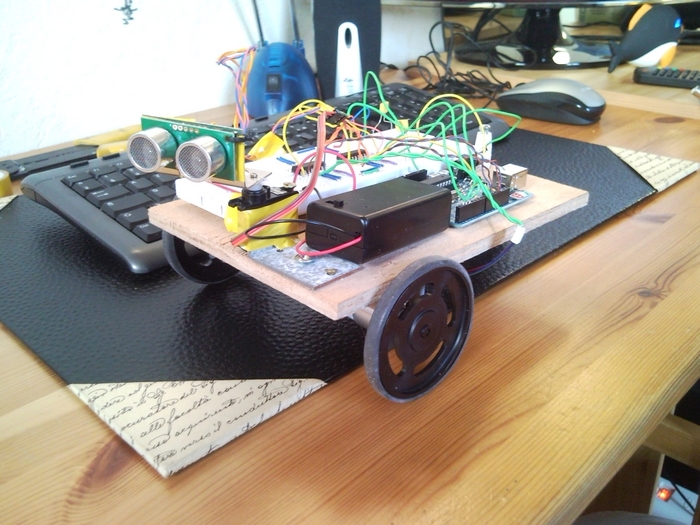
- Ajouter un servomoteur à l'avant
- Brancher le capteur de distance à ultrasons et le monter sur le servomoteur (pour checker dans plusieurs directions)
- Programmer...
Veuillez noter que lorsque j'aurai terminé d'intégrer ces éléments (servomoteur + capteur distance), je ferai un petit tutoriel. Il ne servira pas à créer exactement le même robot, mais à montrer comment intégrer à une carte Arduino ces éléments (d'un point de vue des branchements et du code).
Ainsi, le tutoriel vous apprendra comment les brancher simplement à la carte et quelles sont les fonctions qui permettent de faire agir chaque élément... J'expliquerai aussi comment j'ai intégré certaines pièces d'un point de vue "mécanique", car pour certaines pièces j'ai fait des choix assez spéciaux (prévu mais pas encore installé).
Bien à vous,
Glius. :)



 [/left]
[/left]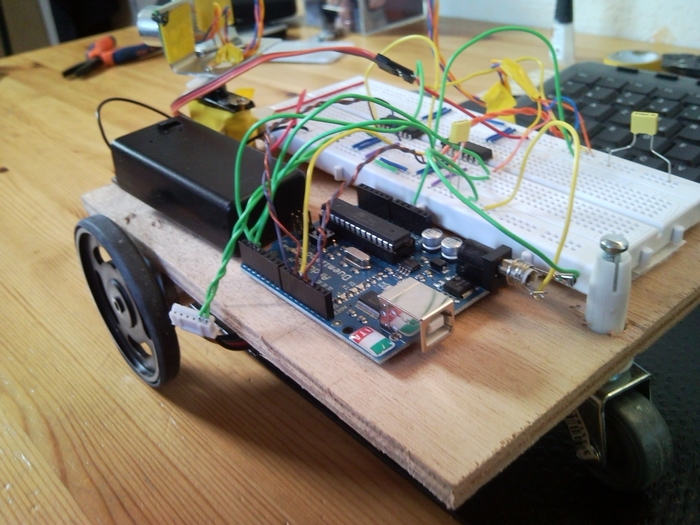 [/left]
[/left]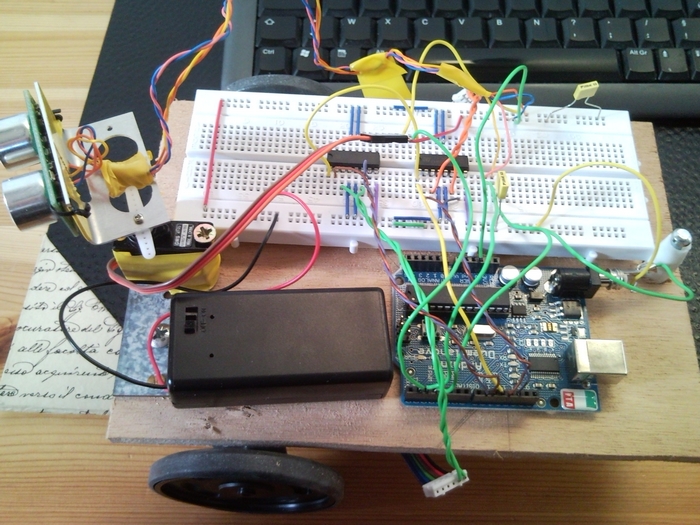 [/left]
[/left]














