
Je veux pas tout casser, mais ton robot repère un obstacle, et l'évite en tournant autour. Si l'obstacle est l'adversaire, il bouge ^^ et donc si on met 2 robot comme le tien, ça sent la collision!

161 réponses à ce sujet
#82

Jbot
-
- Membres
-

- 801 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 31 mars 2011 - 09:00
Bah c'est les risque dans les objets multiple mobile, chaque objet ne connaissant pas la trajectoire de l'autre, il y a toujours des risques de collision. On essaie juste de les empêcher en continuant à regarder les capteurs même quand on est en train d'éviter. Mais le risque zéro n'existe pas dans ces conditions de plusieurs objets mobiles non-communiquant.
#83
Hexa Emails
-

- Membres
-
- 439 messages
Membre passionné
- Gender:Male
Posté 01 avril 2011 - 09:08
Ha, tu continues de regarder le capteurs.
ça se voit pas sur la vidéo! ^^"
Je trouve vraiment que les manuvres d'évitement c'est un des trucs les plus dur à programmer... et en plus ton robot doit continuer de se repérer dans l'espace!
Bon courage pour la suite!
ça se voit pas sur la vidéo! ^^"
Je trouve vraiment que les manuvres d'évitement c'est un des trucs les plus dur à programmer... et en plus ton robot doit continuer de se repérer dans l'espace!
Bon courage pour la suite!

#85
Esprit
-

- Membres
-
- 1â¯503 messages
Pilier du forum
- Gender:Male
- Location:Belgique
Posté 11 avril 2011 - 01:55
La classe !
Tu t'es fais un vrai terrain ou bien tu t'es trouvés des copains qui en ont un ? :D
Va falloir que tu assures, maintenant que j'ai vu tes adversaires...
(Le robot de la team-XD est assez terrible je trouve. Maintenant, je demande à voir comment il attrape les pions etc, mais au niveau look c'est sympa. Et il y a des sous derrière... 16 moteurs AX12 ça fait un paquet de sous... 700-800, ça dépend les prix qu'ils ont pu avoir... )
Tu t'es fais un vrai terrain ou bien tu t'es trouvés des copains qui en ont un ? :D
Va falloir que tu assures, maintenant que j'ai vu tes adversaires...
(Le robot de la team-XD est assez terrible je trouve. Maintenant, je demande à voir comment il attrape les pions etc, mais au niveau look c'est sympa. Et il y a des sous derrière... 16 moteurs AX12 ça fait un paquet de sous... 700-800, ça dépend les prix qu'ils ont pu avoir... )
#86
Jbot
-
- Membres
-
- 801 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 11 avril 2011 - 01:59
J'ai fais un week end robotique avec 4 autres équipes dans les locaux d'une des équipes !
Donc j'ai squatté leur terrain et leurs pions :p
(24H de robotique non stop sans dormir c'était dur :D Bon y avait crêpes à volonté pour tenir ;) )
Donc j'ai squatté leur terrain et leurs pions :p
(24H de robotique non stop sans dormir c'était dur :D Bon y avait crêpes à volonté pour tenir ;) )
#88
Jbot
-
- Membres
-
- 801 messages
Membre chevronné
- Gender:Male
- Location:Paris
#89
Jbot
-
- Membres
-
- 801 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 11 avril 2011 - 04:02
Je suis sensé faire un poster format A1 pour la coupe, quelles informations vous semblent utiles à mettre sur Maximus ? ^^ Il me faut un avis extérieur, vu que je l'ai développé, pour moi ca me semble basique et je vois pas trop quoi mettre d'utile :s
#90
Esprit
-
- Membres
-
- 1â¯503 messages
Pilier du forum
- Gender:Male
- Location:Belgique

#92
Jbot
-
- Membres
-
- 801 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 15 avril 2011 - 07:07
Après un bon petit week-end robotique à Evry organisé par l'équipe Origine (en compagnie de APBTeam, Air Isep et une autre équipe), il fallait se remettre au boulot !
Je me suis rendu compte que le robot avait un peu de mal a soulever des tours (ben oui, chez moi la tour doit peser 300g alors que la bas la vraie tour pesait plutôt 1Kg ;) ). Du coup le robot se mettait légèrement en porte à faux sur l'avant et les roues arrières avaient semblaient patiner...
On a donc décidé d'avancer un peu les ballcaster pour que le porte à faux soit moins important. Mais du coup, il a fallut refaire 2 pièces permettant de fixer les ballcaster plus loin.
Il ne reste plus qu'a recoller les ballcaster et ça sera bon !
Je pense que les moteurs sont aussi limite niveau couple et que les roues ne sont pas vraiment adaptées, mais bon c'est ma première participation, je ne pouvais pas savoir !
Au passage, le poster que j'ai fais pour la coupe (toute suggestion est la bienvenue :p ) : http://kriegel.joffrey.free.fr/poster_Eurobot_SMART.pdf
Je me suis rendu compte que le robot avait un peu de mal a soulever des tours (ben oui, chez moi la tour doit peser 300g alors que la bas la vraie tour pesait plutôt 1Kg ;) ). Du coup le robot se mettait légèrement en porte à faux sur l'avant et les roues arrières avaient semblaient patiner...
On a donc décidé d'avancer un peu les ballcaster pour que le porte à faux soit moins important. Mais du coup, il a fallut refaire 2 pièces permettant de fixer les ballcaster plus loin.
Il ne reste plus qu'a recoller les ballcaster et ça sera bon !
Je pense que les moteurs sont aussi limite niveau couple et que les roues ne sont pas vraiment adaptées, mais bon c'est ma première participation, je ne pouvais pas savoir !
Au passage, le poster que j'ai fais pour la coupe (toute suggestion est la bienvenue :p ) : http://kriegel.joffrey.free.fr/poster_Eurobot_SMART.pdf



#97
Esprit
-
- Membres
-
- 1â¯503 messages
Pilier du forum
- Gender:Male
- Location:Belgique
Posté 18 avril 2011 - 01:38
Salut Jbot!
Après ma visite de la coupe de belgique samedi, il y a deux trois choses que j'ai remarqué sur les posters.
Pas mal sont en anglais, certains présentent la stratégie du robot ainsi que son fonctionnement dans les moindres détails et d'autres sont plus vagues et se contentent de donner les points essentiels.
J'ai aussi remarqué qu'on pouvait utiliser des balises (jusqu'à trois par équipe réparties sur le bord du terrain ainsi qu'une sur le robot adverse.) Je n'étais pas du tout au courant et j'ai été un peu surpris. Le robot n'est plus vraiment autonome s'il fait appel à des informations extérieures...
Après ma visite de la coupe de belgique samedi, il y a deux trois choses que j'ai remarqué sur les posters.
Pas mal sont en anglais, certains présentent la stratégie du robot ainsi que son fonctionnement dans les moindres détails et d'autres sont plus vagues et se contentent de donner les points essentiels.
J'ai aussi remarqué qu'on pouvait utiliser des balises (jusqu'à trois par équipe réparties sur le bord du terrain ainsi qu'une sur le robot adverse.) Je n'étais pas du tout au courant et j'ai été un peu surpris. Le robot n'est plus vraiment autonome s'il fait appel à des informations extérieures...
#98
Jbot
-
- Membres
-
- 801 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 18 avril 2011 - 01:47
Le terme autonome veut juste dire qu'aucun etre humain ne pilote le robot. Aprés tu peux meme mettre un GPS dessus si tu veux (tu t'aideras des satéllites du coup) il n'en restera pas moins autonome.
Mais en effet on a le droit de créer des balises et de faire de la triangulation.
Je verrais pour le poster si je rajoute des trucs, pour moi ca sera que en francais vu que je ne pense pas pouvoir participer à la coupe d'europe avec mon niveau.
Mais en effet on a le droit de créer des balises et de faire de la triangulation.
Je verrais pour le poster si je rajoute des trucs, pour moi ca sera que en francais vu que je ne pense pas pouvoir participer à la coupe d'europe avec mon niveau.
#99
Jbot
-
- Membres
-
- 801 messages
Membre chevronné
- Gender:Male
- Location:Paris
Posté 22 avril 2011 - 08:07
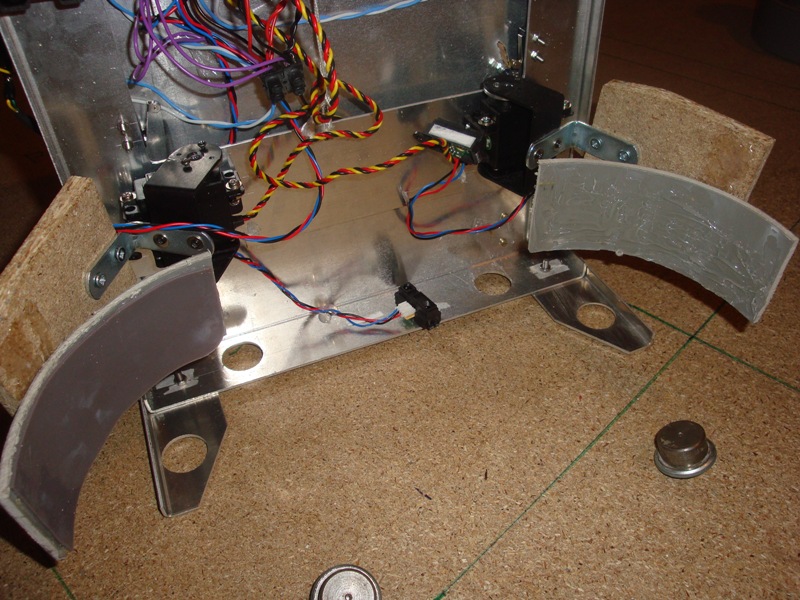
Et paf une nouvelle pince !
Bon cette fois c'est la derniere version :D
Ca marche plutot pas mal, elle est adaptable et aggrippe bien les pions !
La vidéo de la pince
Bon cette fois c'est la derniere version :D
Ca marche plutot pas mal, elle est adaptable et aggrippe bien les pions !
La vidéo de la pince
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users





{kind=link}