

Le but es t de commander un joystick pour des test de boitier .............. ( je ne peux pas dire les marques et l'entreprise).
Le bras sera composé de 4/5 servomoteur.
Dans un premier temps je vais m'occuper de la réalisation technique.
Dimension du bras : 70 cm en horizontal (pince épaule)
On veut pouvoir exercer une force de 10 newton (n'ayant besoin que de 5 newton je préfère doubler pour une meilleur marge) selon x et Y en bout de pince.
Ci joint un rapide schéma réaliser sous paint
j'ai définit des couleur pour chaque servomoteur.
Les tiges serait des bielletes qui peuvent être réalisés en plastique, aluminium ou en carbone donc un poids qui sera décider
Je suis en train de faire les calculs pour déterminer les servosmoteur je pense utiliser des Servo Hitec HS-785HB ou moins si je peux.
[ EDIT 1: les dimensions des tiges j'ai oublier dsl :)
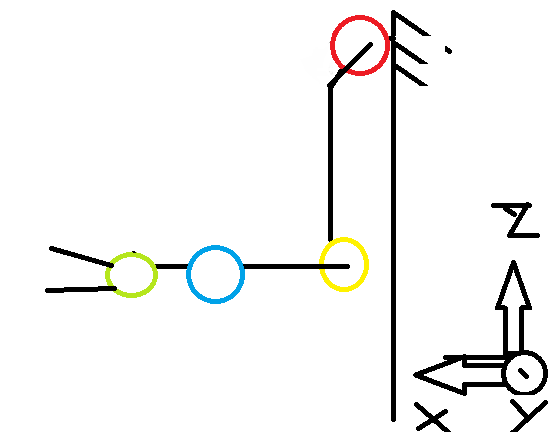
tige 1 : epaule coude 25 cm Je définis ces valeurs comme entre Axe c'està dire distance entre les axes du servomoteurs
tige 2: coude poignet 30 cm
tige 3: doigt 13 cm
Pour informations le prochains post regroupera toutes les posts très intéressant (merci notamment a Esprit MRAlexis44660 et julienmus) et qui sont des mines d'informations.
merci



















{kind=link}