
Bien, très bien! Ca me fait plaisir de voir qu'on peut faire ce genre de choses en amateur!
Je ne donnerai pas de note, mais je me permet de te demander un peu de détails techniques.
Donc tu t'ammuses avec ton Lidar de Neato. Si j'avais eu un Lidar pour mon BOB3, ça aurait été génial!
Mes questions:
1) Quel processeur utilises-tu? Un PC? Autre chose de puissant pour pouvoir analyser les infos en temps réel?
2) en regardant la vidéo, je comprend que tu n'utilises pas le Lidar pour localiser le robot, uniquement l'odométrie pour la localisation; et donc je comprend que tu repositionne en temps réel l'environnement 2D détecté par le Lidar en fonction de l'odométrie uniquement. C'est bien ça? Si oui, est-ce que tu projettes d'utiliser un algo de localisation qui utilise les infos du LIDAR? Histoire de ne pas perdre le nord même si tu te fais bousculer pendant un Match!
3) Quel type d'algorithme utilises-tu pour la planification de trajectoire? Ca n'est pas trop gourmand en puissance de calcul?
Leon.

36 réponses à ce sujet
#21
 A multi-purpose test bot : message #21")
Leon
-

- Membres
-

- 1â¯289 messages
Membre passionné
- Gender:Male
Posté 02 octobre 2011 - 07:00
BOB4, mon drone hélicoptère autonome d'intérieur http://heli.bot.free.fr/
BOB3, mon robot autonome d'intérieur avec WiFi + Foxboard Linux http://ze.bot.free.fr/
BOB5, robot bipède simulé, puis tentative de réalisation (fail)
#22
Jbot
-
- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 02 octobre 2011 - 09:35
Salut !
En effet, je fais mumuse avec mon Lidar de Neato, même si je l'ai a moitié cassé en le faisant tomber
J'utilise pour l'instant un eeepc avec un atom dedans, c'est largement suffisant pour analyser les données, je ne mets pas le processeur à genoux. Une carte de type beagleboard par contre serait trop legère niveau capacité de calcul.
Sinon, oui tu as raison je n'utilise que l'odométrie pour me positionner et je positionne la "carte" faite par le Lidar par rapport à ma position. Par contre je ne pense pas utiliser l'algo de type SLAM car le terrain est trop pauvre en élément de décors. En fait il n'y a que des petit mur haut de 7cm autour de la table, ce qui voudrait dire que mon Lidar se trouve complétement par terre, ce que ne je pense pas faire.
Du coup je me perdrais quand même si on me fonce dessus et que l'on me déplace :s
En effet, je fais mumuse avec mon Lidar de Neato, même si je l'ai a moitié cassé en le faisant tomber
J'utilise pour l'instant un eeepc avec un atom dedans, c'est largement suffisant pour analyser les données, je ne mets pas le processeur à genoux. Une carte de type beagleboard par contre serait trop legère niveau capacité de calcul.
Sinon, oui tu as raison je n'utilise que l'odométrie pour me positionner et je positionne la "carte" faite par le Lidar par rapport à ma position. Par contre je ne pense pas utiliser l'algo de type SLAM car le terrain est trop pauvre en élément de décors. En fait il n'y a que des petit mur haut de 7cm autour de la table, ce qui voudrait dire que mon Lidar se trouve complétement par terre, ce que ne je pense pas faire.
Du coup je me perdrais quand même si on me fonce dessus et que l'on me déplace :s
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
#23
Jbot
-
- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 03 octobre 2011 - 09:41
Hop un petit test supplémentaire (sur le terrain de la coupe 2012  )
)
Les contraintes :
- interdiction d'aller sur l'ile "cacahuete" (parties vertes centrales)
- éviter l'adversaire (le tube gris)
)Les contraintes :
- interdiction d'aller sur l'ile "cacahuete" (parties vertes centrales)
- éviter l'adversaire (le tube gris
)
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.

#25
Jbot
-
- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 06 novembre 2011 - 11:17
Un petit peu de software pour la coupe 2012.
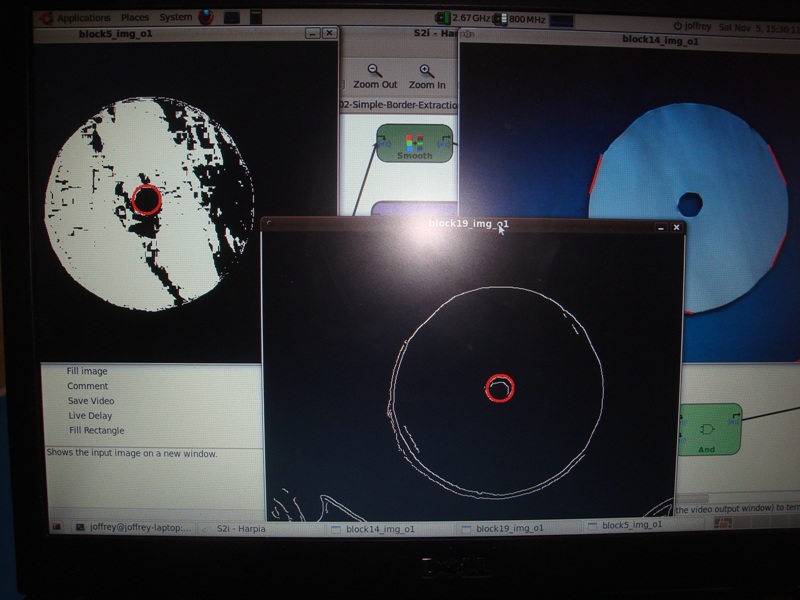
Cette année il faut détecter des CD blancs et des lingots, lidée est donc de detecter les cercles, les zones de couleur blanches, et les lignes droites.
Tout ceci est assez simple grâce à la bibliothèque OpenCV, il ne reste plus qua lajouter avec le reste du code.
Detection des lignes dun lingot (à droite) :
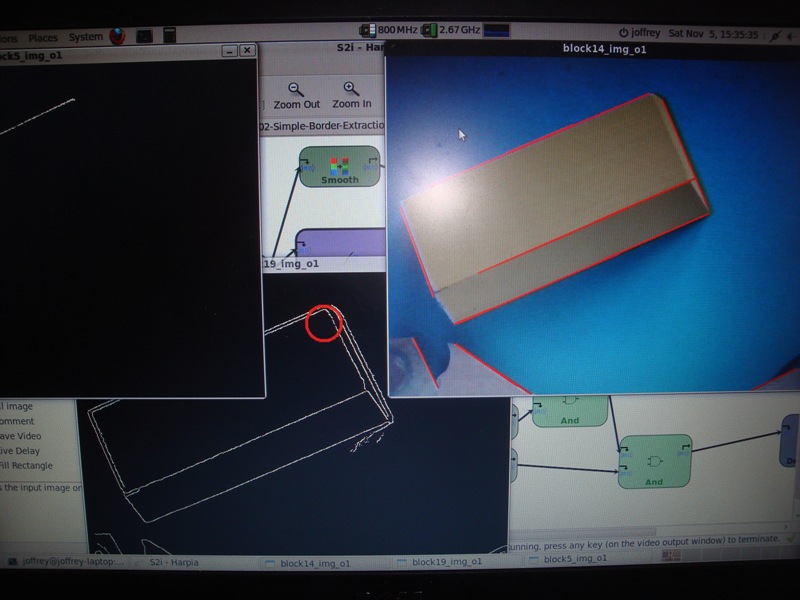
Detection de couleur blanche et cercle (à gauche) et de contour et cercle (au centre) :
Et voici une petite vidéo en action :
http://www.youtube.com/watch?v=thMZipuVxts
Source :
http://smartrobotics.wordpress.com/2011/11/06/webcam-detection-de-couleur-blanche-cercles-lignes/
Cette année il faut détecter des CD blancs et des lingots, lidée est donc de detecter les cercles, les zones de couleur blanches, et les lignes droites.
Tout ceci est assez simple grâce à la bibliothèque OpenCV, il ne reste plus qua lajouter avec le reste du code.
Detection des lignes dun lingot (à droite) :
Detection de couleur blanche et cercle (à gauche) et de contour et cercle (au centre) :
Et voici une petite vidéo en action :
http://www.youtube.com/watch?v=thMZipuVxts
Source :
http://smartrobotics.wordpress.com/2011/11/06/webcam-detection-de-couleur-blanche-cercles-lignes/
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
#26
Black Templar
-

- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 06 novembre 2011 - 11:41
Cool ! ça à l'air de bien marcher !
Tu utilises quoi comme algos ??
Une détection de points d'intérêt et une transformée de Hough pour détecter le lingo ??
Ou bien une détection de contour, binarisation et segmentation ??
Autre chose ?
Tu utilises quoi comme algos ??
Une détection de points d'intérêt et une transformée de Hough pour détecter le lingo ??
Ou bien une détection de contour, binarisation et segmentation ??
Autre chose ?
Mon site internet : http://ferdinandpiette.com/

#29
Jbot
-
- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 06 novembre 2011 - 03:48
Cool ! ça à l'air de bien marcher !
Tu utilises quoi comme algos ??
Une détection de points d'intérêt et une transformée de Hough pour détecter le lingo ??
Ou bien une détection de contour, binarisation et segmentation ??
Autre chose ?
Pour détecter le lingo c'est juste une detection de lignes avec une transformée de Hough.
Pour les cercles c'est detection de contours et une transformée de Hough pour detecter les cercles.
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
#30
Jbot
-
- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 11 janvier 2012 - 09:55
Nayant pas encore installé lodométrie sur le robot, jai commencé a faire des tests avec son laser pour tester le positionnement. Le robot utilise un algorithme de SLAM (Simultaneous Localization And Mapping) pour se positionner.
Ca fonctionne plutot pas mal pour des gros trajets, ne necessitant pas une précision au mm prés. Pour la coupe, cest pas assez précis par rapport a de la bonne odométrie.
Voici un petit test du robot se baladant dans mon appartement :
Ca fonctionne plutot pas mal pour des gros trajets, ne necessitant pas une précision au mm prés. Pour la coupe, cest pas assez précis par rapport a de la bonne odométrie.
Voici un petit test du robot se baladant dans mon appartement :
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
#31
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 11 janvier 2012 - 11:06
Waa ! Bravo, c'est vraiment cool ! 
++
Black Templar
Et ça serait compliqué d'utiliser le SLMA non pas pour te positionner mais plutôt pour recaler l'odométrie au bout d'un certain temps ou si le robot dérape ??Ca fonctionne plutot pas mal pour des gros trajets, ne necessitant pas une précision au mm prés. Pour la coupe, c'est pas assez précis par rapport a de la bonne odométrie.
++
Black Templar
Mon site internet : http://ferdinandpiette.com/
#32
Jbot
-
- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 11 janvier 2012 - 11:54
Ca pourrait etre faisable, mais le probleme c'est que le terrain ne possede que des murs trés bas, et il faudrait que le laser rase le sol du coup donc bon. On va garder l'odométrie pour l'instant
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
#33
Jbot
-
- Membres
-
- 801 messages
Membre passionné
- Gender:Male
- Location:Paris
- Interests:Robotics
Posté 17 janvier 2012 - 01:30
Pour le gros robot de cette année (L'Indomptable), nous avons décidé de tester les bras et les ventouses. Il sera donc surement équipé de 2 bras avec ventouse pour attrapper les CDs et lingots.
Les bras ne sont pas forcement ce qu'il y a de mieux, mais nous pensons que c'est ce qu'il y a de plus réutilisable pour d'autres robots, et étant donné que l'on cherche à faire quelque chose de réutilisable et à peu prés générique...
Nous avons donc implémenté une cinématique inverse pour les bras puis des positions à atteindre suivant que l'on cherche dans un totem ou au sol.
Voici en gros l'architecture logicielle qui gère les bras (seulement le gauche est connecté) :
(Oval = thread / rectangle = message)
http://smartrobotics.files.wordpress.com/2012/01/arm.jpg
Et voici une premiere vidéo du bras gauche en action, et d'un bout de la modélisation du robot :
---
Voici la simulation des 2 bras du robot sur le terrain 2012.
Ce sont des premiers tests pour voir si les bras peuvent bien aller dans les endroits souhaités.
Tout le calcul est fait par le soft qui sera dans le robot, les messages finaux sont juste envoyés au simulateur au lieu d'etre envoyés aux moteurs.
La vidéo :
Les bras ne sont pas forcement ce qu'il y a de mieux, mais nous pensons que c'est ce qu'il y a de plus réutilisable pour d'autres robots, et étant donné que l'on cherche à faire quelque chose de réutilisable et à peu prés générique...
Nous avons donc implémenté une cinématique inverse pour les bras puis des positions à atteindre suivant que l'on cherche dans un totem ou au sol.
Voici en gros l'architecture logicielle qui gère les bras (seulement le gauche est connecté) :
(Oval = thread / rectangle = message)
http://smartrobotics.files.wordpress.com/2012/01/arm.jpg
Et voici une premiere vidéo du bras gauche en action, et d'un bout de la modélisation du robot :
---
Voici la simulation des 2 bras du robot sur le terrain 2012.
Ce sont des premiers tests pour voir si les bras peuvent bien aller dans les endroits souhaités.
Tout le calcul est fait par le soft qui sera dans le robot, les messages finaux sont juste envoyés au simulateur au lieu d'etre envoyés aux moteurs.
La vidéo :
Malédiction du Créatif :
Plus vous avez d’idées et moins vous arrivez à les structurer.
#35
RobotVince
-

- Membres
- 19 messages
Nouveau membre
Posté 18 janvier 2012 - 11:04
Super intéressant de voir la réalisation de ce genre de robot !
Quel genre de softs utilise tu pour faire tes simulations/plans etc ? Un logiciel de 3D (3dsmax like ?) ou il y a des outils dédiés (pke modéliser les pièces/servo/moteur un à un ... c'est long !)
Merci
Quel genre de softs utilise tu pour faire tes simulations/plans etc ? Un logiciel de 3D (3dsmax like ?) ou il y a des outils dédiés (pke modéliser les pièces/servo/moteur un à un ... c'est long !)
Merci
#37
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 16 mai 2012 - 02:58
Bonne chance !
Que la force soit avec vous
Que la force soit avec vous
Mon site internet : http://ferdinandpiette.com/
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users





{kind=link}