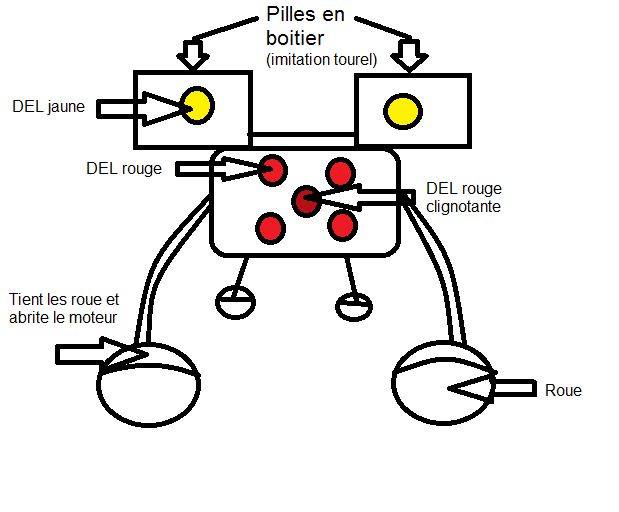
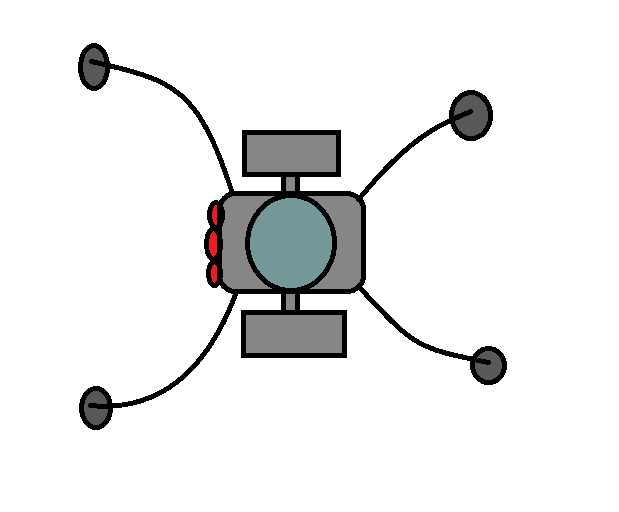
J'ai fait les "plans" sur paint et mon robot ressemblerais a sa (voir pièces jointes)
Voila ici je détail :
1°)Pile en boitier : petite boite qui regrouperais les piles aux-quelles seront installé une DEL jaune. Le boitier de droite fournirait l'électricité pour les moteurs avant et le boitier de gauche l’électricité des moteurs arrière (ou alors les 2 boitier montés en série alimentant les 4 moteurs.
2°)DEL jaune : Simple DEL jaune étant alimentée par le boitier correspondant.
3°)DELs rouges : Simple DELs rouge alimentées par une pile a part dans le "torse" du robot.
4°)DEL rouge clignotante : DEL rouge clignotante avec un LRC alimenté a part aussi ( j'évite les tensions trop lourdes )
5°)La partie dont je ne sait pas le nom : comprenant un moteur relié aux piles en boitier, les 4 tournant en même temps.
6°)Roue : Simple roue
Voila l'explication maintenant les question
 :
:-Es-que tout coïncide ?
-Quel modification je pourrais faire ? (comme un bouton poussoir désactivant la rotation des 2 roue du même coté pour le faire tourner quand rencontre obstacle).
-Comment je pourrais faire tourner la partie supérieure d'une façon aléatoire (les piles en boitier comme pour faire une tourelle).
Demandez moi de précision si nécessaire.
Tout autres modification, amélioration, images, plans etc... sont le bien venu.
Merci d'avance. Arthur60
EDIT : SVP dites moi comment faire tourner un moteur dans un sens aléatoire (ou alors programmable ou télécommander mais très simple)