Bonjour à tous,
Je suis un grand débutant en robotique, beaucoup moins dans les domaines qui sont indispensable grâce aux lien de Black Tempar.
Je trouve qu'il y a beaucoup trop de chose, c'est très vaste la robotique pour que je puisse savoir par où commencer... Je voudrai faire petit à petit avec votre aide, je ne vous laisserez pas le faire, car ça me tient à coeur de comprendre par moi même et d'arriver à devenir autonome dans ce domaine. Je risque de poser des questions auxquelles vous avez certainement répondu quelque part, dans ce cas je suis désolé, mais comme je l'es dis, c'est vraiment trop vaste.
Pour commencer, voilà un peu le projet :
- Un robot qui marche avec des roues (on m'a conseillé de commencer par ça)
- Qui puisse voir avec une mini caméra (et que je puisse voir ce qu'il voit par mon ordinateur)et que sa tête puisse bouger à 360°
- Qu'il puisse parler (dire quelques phrase, peut être répondre automatiquement par les mêmes mots lorsqu'il entends une certaines questions ou phrases)
- Qu'il puisse être téléguidé
- Et qu'il puisse avoir des gadgets, mais à ce moment là il faudrait que ce soit des gadget articulés...
Pour un début, c'est un niveau élevé, mais je prendrais mon temps.
Voilà quelque une de mes questions :
Pour la première étape, je dois choisir le type d'énergie que je veux utiliser ? Dans ce cas qu'est ce que vous me conseillez ? Je pensais à une batterie qui puissent durer assez longtemps.
Pour les roues, je dois faire un système comme dans les voiture téléguidés ?
Pour la mini caméra, je sais pas trop où je peux en trouver pour les fonctions que je voudrai remplir...
Qu'il puisse parler, là c'est difficile mais avec le temps je pense arriver à programmer tout ça, mais comment mettre le programme sur le robot ?
Téléguidé encore plus pire, si quelqu'un a des liens pour m'aider à comprendre tout ça...
Pour un robot, l'élément de base c'est le générateur (qu'on choisit), ensuite les fils de connexion pour relier par exemple à des éclairage (à la caméra ?), à quoi sert un circuit imprimé ?
Voilà, j'espère que l'on pourra ensemble avancer petit à petit dans chaque étape.
Merci à tous,
Roborox

Projet robot
Débuté par
Guest_Roborox_*
, nov. 03 2011 07:12
21 réponses à ce sujet
#2

Microrupteurman
-

- Modérateur
-

- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
Posté 03 novembre 2011 - 07:26
Salut,
C'est extremement compliqué de faire ca, Ca sera pour dans un certain moment.... Dans la robotique il faut faire preuve de beaucoup de patience !
Energie, tu as le choix suivant ton budjets, des pack d'accus ni-mh ou des li po. Il faut oublier les piles.
Moi je tourne avec des accus nimh rechargeable que l'on trouve dans tout les magasins.
Pour commencé, je te propose de prendre un capteur infrarouge sharp avec un servo, histoire d'avoir les bases en programmation.
Il existe des chassis pour robot tout pret (Mon lien)
Pour programmer ton bot Il te faut une carte de programmation ARDUINO (voir lien) Ou dfrDuino.
Ensuite pour tes moteurs il te faudra une carte de puissance (shield) elle se branche sur la carte de programmation et permet de gerer les moteurs.
Un autre conseil, si tu a des vieux appareil electrique, tu peus commencé a recuperer des composants.. As tu un fer a souder ? sa ce trouve pour pas trés cher dans les magasins.
Pour exemple je te conseil de regardé les autre postes du forum.
Pour la camera j'ai trouvé un site ou pour 70€ tu as une cam sans fil avec recepteur, mais tu pourra saulement voir ou ton robot ai avec, elle ne peut pas lui servir de capteur.
Moi aussi j'etais un grand debutant en robotique et programmation, mais avec l'aide des d=gens d'ici j'y suis arrivé !
Mon topic
Qui puisse voir avec une mini caméra (et que je puisse voir ce qu'il voit par mon ordinateur)et que sa tête puisse bouger à 360°
- Qu'il puisse parler (dire quelques phrase, peut être répondre automatiquement par les mêmes mots lorsqu'il entends une certaines questions ou phrases)
C'est extremement compliqué de faire ca, Ca sera pour dans un certain moment.... Dans la robotique il faut faire preuve de beaucoup de patience !
Energie, tu as le choix suivant ton budjets, des pack d'accus ni-mh ou des li po. Il faut oublier les piles.
Moi je tourne avec des accus nimh rechargeable que l'on trouve dans tout les magasins.
Pour commencé, je te propose de prendre un capteur infrarouge sharp avec un servo, histoire d'avoir les bases en programmation.
Il existe des chassis pour robot tout pret (Mon lien)
Pour programmer ton bot Il te faut une carte de programmation ARDUINO (voir lien) Ou dfrDuino.
Ensuite pour tes moteurs il te faudra une carte de puissance (shield) elle se branche sur la carte de programmation et permet de gerer les moteurs.
Un autre conseil, si tu a des vieux appareil electrique, tu peus commencé a recuperer des composants.. As tu un fer a souder ? sa ce trouve pour pas trés cher dans les magasins.
Pour exemple je te conseil de regardé les autre postes du forum.
Pour la camera j'ai trouvé un site ou pour 70€ tu as une cam sans fil avec recepteur, mais tu pourra saulement voir ou ton robot ai avec, elle ne peut pas lui servir de capteur.
Moi aussi j'etais un grand debutant en robotique et programmation, mais avec l'aide des d=gens d'ici j'y suis arrivé !
Mon topic
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#3
Guest_Roborox_*
Guest_Roborox_*
-

- Guests
Posté 03 novembre 2011 - 07:43
Salut
Merci beaucoup, je vais prendre le temps de regarder tout çà et de comprendre (pour l'instant c'est du chinois pour moi mais je persévère )
)
Pour le faire parler il suffit juste de savoir faire le programme ? C'est à ça que sert une programmation non ?
Je suis actuellement en train d'apprendre le langage C et C++, j'ai installé tout les logiciel qu'il faut et j'apprends grâce aux cours par internet (dans un lien de Black Templar).
Oui, j'ai beaucoup de stock de composant que j'ai pris de plusieurs objet électrique, mais ils sont soudé au circuit, donc je fais comment pour les enlever ? Pour le fer à souder, mon père doit en avoir un mais sinon je peux l'acheter.
C'est à dire ? Je pourrai voir ce que voit le robot ?
Pour commencé, je te propose de prendre un capteur infrarouge sharp avec un servo, histoire d'avoir les bases en programmation.
Il existe des chassis pour robot tout pret (Mon lien)
Pour programmer ton bot Il te faut une carte de programmation ARDUINO (voir lien) Ou dfrDuino.
Ensuite pour tes moteurs il te faudra une carte de puissance (shield) elle se branche sur la carte de programmation et permet de gerer les moteurs.
Merci beaucoup, je vais prendre le temps de regarder tout çà et de comprendre (pour l'instant c'est du chinois pour moi mais je persévère
)C'est extremement compliqué de faire ca, Ca sera pour dans un certain moment.... Dans la robotique il faut faire preuve de beaucoup de patience !
Pour le faire parler il suffit juste de savoir faire le programme ? C'est à ça que sert une programmation non ?
Je suis actuellement en train d'apprendre le langage C et C++, j'ai installé tout les logiciel qu'il faut et j'apprends grâce aux cours par internet (dans un lien de Black Templar).
Un autre conseil, si tu a des vieux appareil electrique, tu peus commencé a recuperer des composants.. As tu un fer a souder ? sa ce trouve pour pas trés cher dans les magasins
Oui, j'ai beaucoup de stock de composant que j'ai pris de plusieurs objet électrique, mais ils sont soudé au circuit, donc je fais comment pour les enlever ? Pour le fer à souder, mon père doit en avoir un mais sinon je peux l'acheter.
Pour la camera j'ai trouvé un site ou pour 70 tu as une cam sans fil avec recepteur, mais tu pourra saulement voir ou ton robot ai avec, elle ne peut pas lui servir de capteur.
C'est à dire ? Je pourrai voir ce que voit le robot ?
#4
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
Posté 03 novembre 2011 - 08:02
Effectivement pour le faire parler, c'est de la programmation, mais c'est pas seulement 100 ligne de code... et si en plus tu veux lui mettre un micro pour lui parler, c'est relativement '' baleiz ''. Je dit pas que c'est impossible, mais pour l'instant ce n'ai pas a ta porté (ni a la mienne d'ailleur !)
Pour dessouder les composants tu a 2 solution :
- soit tu galere avec un fer a souder et une pince
- soit tu achete une pompe a dessouder !
Pour la cam, tu ne pourra pas voir ce que le robot voit, car lui il verra rien. C'est simplement une camera sans fil qui ne se branche pas sur la carte de programmation. POur etre plus clair tu verra ce qu'il a devant lui. C'est tout.
Il ne pourra pas s'en servir pour 'voir'.
Pour dessouder les composants tu a 2 solution :
- soit tu galere avec un fer a souder et une pince
- soit tu achete une pompe a dessouder !
Pour la cam, tu ne pourra pas voir ce que le robot voit, car lui il verra rien. C'est simplement une camera sans fil qui ne se branche pas sur la carte de programmation. POur etre plus clair tu verra ce qu'il a devant lui. C'est tout.
Il ne pourra pas s'en servir pour 'voir'.
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#5
Black Templar
-

- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 03 novembre 2011 - 09:12
Salut !
Hum, pour commencer, tu pourrais faire un robot à roues (2 roues motrices + une roue folle) qui puisse être téléguidé.
Seulement arrivé là, il sera temps de penser à ajouter des capteurs, une caméra et à faire de la reconnaissance vocale.
Si tu veux avoir 4 contacts au sol (4 roues), tu es obligé de rajouter des amortisseurs, sinon les 4 roues ne seront jamais en contacts avec le sol en même temps.
Donc si tu as 2 roues + une roue folle, tu peux diriger ton robot en faisant varier la différence de vitesse entre les 2 roues.
Pour tester tes montages, tu peux investir dans une platine d'essai (que l'on appelle platine labdec). ça te permettra de ne pas à avoir à souder de composants !
Mais j'ai cru comprendre que tu voulais que le robot puisse comprendre ce qu'on lui dit et répéter les mêmes phrases. Là, ce n'est plus uniquement de la programmation, mais aussi énormément de mathématiques !!
Déjà, reconnaitre un son mono-fréquence (une note de flute par exemple), ce n'est pas simple (tu dois faire une analyse de ton signal sonore par une analyse par périodogramme basé sur le calcul d'une transformée de fourier) alors imagine reconnaitre ne serait-ce qu'une syllabe prononcé par un humain... très très dur !
Le mieux est de commencer par un robot 2 roues télécommandé en filaire puis sans fil (par onde radio, bluetooth ou wifi). Seulement après, tu verras plus clair sur ce que tu as envie de faire ^^
Bon courage,
Black Templar
Pour commencer, voilà un peu le projet :
- Un robot qui marche avec des roues (on m'a conseillé de commencer par ça)
- Qui puisse voir avec une mini caméra (et que je puisse voir ce qu'il voit par mon ordinateur)et que sa tête puisse bouger à 360°
- Qu'il puisse parler (dire quelques phrase, peut être répondre automatiquement par les mêmes mots lorsqu'il entends une certaines questions ou phrases)
- Qu'il puisse être téléguidé
- Et qu'il puisse avoir des gadgets, mais à ce moment là il faudrait que ce soit des gadget articulés...
Hum, pour commencer, tu pourrais faire un robot à roues (2 roues motrices + une roue folle) qui puisse être téléguidé.
Seulement arrivé là, il sera temps de penser à ajouter des capteurs, une caméra et à faire de la reconnaissance vocale.
Le plus simple, c'est d'avoir 3 contacts avec le sol : 2 roues motrices (avant ou arrière) et une roue folle (qui n'est pas motorisé).Pour les roues, je dois faire un système comme dans les voiture téléguidés ?
Si tu veux avoir 4 contacts au sol (4 roues), tu es obligé de rajouter des amortisseurs, sinon les 4 roues ne seront jamais en contacts avec le sol en même temps.
Donc si tu as 2 roues + une roue folle, tu peux diriger ton robot en faisant varier la différence de vitesse entre les 2 roues.
Comme l'a dit microrupteurman, une caméra sans fil classique fera l'affaire si ton objectif, c'est juste de regarder les images produites par la caméra sur un écran. Par contre, si tu veux que le robot récupère les images pour les analyser et en tirer des informations, c'est bien plus compliqué.Pour la mini caméra, je sais pas trop où je peux en trouver pour les fonctions que je voudrai remplir...
c'est une plaque d'époxy sur laquelle tu soudes tes composants. Les composants sont reliés entre eux par des connections en cuivre.à quoi sert un circuit imprimé ?
Pour tester tes montages, tu peux investir dans une platine d'essai (que l'on appelle platine labdec). ça te permettra de ne pas à avoir à souder de composants !
ça dépend !! Si pour toi, le faire parler, c'est lire un fichier audio, alors oui, c'est 'juste' de la programmation (bien qu'il y ai une partie électronique pour amplifier le signal audio avant de l'envoyé à un haut parleur)Pour le faire parler il suffit juste de savoir faire le programme ? C'est à ça que sert une programmation non ?
Mais j'ai cru comprendre que tu voulais que le robot puisse comprendre ce qu'on lui dit et répéter les mêmes phrases. Là, ce n'est plus uniquement de la programmation, mais aussi énormément de mathématiques !!
Déjà, reconnaitre un son mono-fréquence (une note de flute par exemple), ce n'est pas simple (tu dois faire une analyse de ton signal sonore par une analyse par périodogramme basé sur le calcul d'une transformée de fourier) alors imagine reconnaitre ne serait-ce qu'une syllabe prononcé par un humain... très très dur !
Le mieux est de commencer par un robot 2 roues télécommandé en filaire puis sans fil (par onde radio, bluetooth ou wifi). Seulement après, tu verras plus clair sur ce que tu as envie de faire ^^
Bon courage,
Black Templar
Mon site internet : http://ferdinandpiette.com/
#6
Guest_Roborox_*
Guest_Roborox_*
-
- Guests
Posté 03 novembre 2011 - 11:34
Encore merci pour votre aide ! 
Récapitulons,
Je vais me renseigner et acheter quelques chose pour l'énergie, la base de tout le fonctionnement.
Ensuite pour la tête, il me faut ça :
http://www.zartronic.fr/servo-dfr15sr-%C3%A0-rotation-%C3%A0-360-degr%C3%A9s-15kg-p-278.html?zenid=8fa13dc4ed322e576caad8020ae401fe
(Servo DFR15SR à rotation à 360 degrés )
Et donc sur ce servo je dois y mettre la caméra sans fil (Ce que je voulez c'est voir ce que vois la caméra, comme on voit nous quand on regarde quelque chose)
Pour le piloter à distance (avancer,reculer...), est-ce que ça fait l'affaire ? : http://www.zartronic.fr/kit-t%C3%A9l%C3%A9commande-infrarouge-p-181.html
Pour les roues, je vois pas comment je peux les faire avancer en fait^^
Donc pour la base du robot, qu'il puisse avancer et "voir" si on peut dire, j'ai besoin que de ça ? Tout ça, par exemple le servo, il faut que je soude le servo à la source d'énergie ? ( j'ai pas encore vu à quoi sert chaque composants). Et donc un circuit permet de souder plus de chose ensemble tout simplement ?
Déjà voir la base importante, puis je compliquerai avec programmation,ect.
PS : microrupteurman2 tu voulais parler de quoi quand tu disait moteur ? Moteur pour avancer ou gérer les programmations ?
Récapitulons,
Je vais me renseigner et acheter quelques chose pour l'énergie, la base de tout le fonctionnement.
Ensuite pour la tête, il me faut ça :
http://www.zartronic.fr/servo-dfr15sr-%C3%A0-rotation-%C3%A0-360-degr%C3%A9s-15kg-p-278.html?zenid=8fa13dc4ed322e576caad8020ae401fe
(Servo DFR15SR à rotation à 360 degrés )
Et donc sur ce servo je dois y mettre la caméra sans fil (Ce que je voulez c'est voir ce que vois la caméra, comme on voit nous quand on regarde quelque chose)
Pour le piloter à distance (avancer,reculer...), est-ce que ça fait l'affaire ? : http://www.zartronic.fr/kit-t%C3%A9l%C3%A9commande-infrarouge-p-181.html
Pour les roues, je vois pas comment je peux les faire avancer en fait^^
Donc pour la base du robot, qu'il puisse avancer et "voir" si on peut dire, j'ai besoin que de ça ? Tout ça, par exemple le servo, il faut que je soude le servo à la source d'énergie ? ( j'ai pas encore vu à quoi sert chaque composants). Et donc un circuit permet de souder plus de chose ensemble tout simplement ?
Déjà voir la base importante, puis je compliquerai avec programmation,ect.
PS : microrupteurman2 tu voulais parler de quoi quand tu disait moteur ? Moteur pour avancer ou gérer les programmations ?
#7
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
Posté 03 novembre 2011 - 11:47
Pour la tete
, tu peus prendre un servo moin puissant, et je pense pas que tu ai besoin qu'il voit derriere.
Avec un servo standard a 180°, tu poura programmer ton servo pour faire un balayge avec la cam.
POur la telecommande IR, ca peut marcher, Demande des specification a seb0300.
Aprés, c'est de l'infra rouge, a mon avis la porte est trés faible.
Pour 'les roues' achete toi un chassis tout pret avec moteurs; Ou sinon tu peut te le fabrique.
Il y a tout ce qui faut sur le site du lien pour commencé.
Ensuite, pour branché le servo il te faut une carte de programmation Arduino ou dfr duino
Et avec sa un shield moteur. Ca ce branche sur l'arduino et permet de controler les moteur du chassis.
L'arduino est le coeur du robot.
Pour les moteurs je parler de moteur pour se mouvoir.
Tu veux qu'il soit autonome et radiocommandé ou simplement radiocommandé ?
Si tu veux qu'il soit aussi autonome, il te faudra des capteur de proximité/ contact.
capteur infra rouge
edit; ici tu trouvera du contenu qui pourra t'aider pour programmer ton arduino Mon lien
J'ai vu que tu liser le tuto pour faire des piece en fibre, mais note bien que les piece du tuto sont plate.
Faire un moule revient trés cher pour le nombre de fois qu'on s'en sert. Et collé des plaque de fibres, n'est vraiment pas un travail facile, ni propre ,et c'est aussi fragile (c'est mon metier, j'etais recemment dans la construction de catamaran de luxe en fibre, et pale d'eolienne)
, tu peus prendre un servo moin puissant, et je pense pas que tu ai besoin qu'il voit derriere.
Avec un servo standard a 180°, tu poura programmer ton servo pour faire un balayge avec la cam.
POur la telecommande IR, ca peut marcher, Demande des specification a seb0300.
Aprés, c'est de l'infra rouge, a mon avis la porte est trés faible.
Pour 'les roues' achete toi un chassis tout pret avec moteurs; Ou sinon tu peut te le fabrique.
Il y a tout ce qui faut sur le site du lien pour commencé.
Ensuite, pour branché le servo il te faut une carte de programmation Arduino ou dfr duino
Et avec sa un shield moteur. Ca ce branche sur l'arduino et permet de controler les moteur du chassis.
L'arduino est le coeur du robot.
Pour les moteurs je parler de moteur pour se mouvoir.
Tu veux qu'il soit autonome et radiocommandé ou simplement radiocommandé ?
Si tu veux qu'il soit aussi autonome, il te faudra des capteur de proximité/ contact.
capteur infra rouge
edit; ici tu trouvera du contenu qui pourra t'aider pour programmer ton arduino Mon lien
J'ai vu que tu liser le tuto pour faire des piece en fibre, mais note bien que les piece du tuto sont plate.
Faire un moule revient trés cher pour le nombre de fois qu'on s'en sert. Et collé des plaque de fibres, n'est vraiment pas un travail facile, ni propre ,et c'est aussi fragile (c'est mon metier, j'etais recemment dans la construction de catamaran de luxe en fibre, et pale d'eolienne)
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#8
Guest_Roborox_*
Guest_Roborox_*
-
- Guests
Posté 04 novembre 2011 - 12:29
Je regarde un peu tout le forum pour apprendre, mais là je suis toujours un peu perdu... Ok pour le matériel je peux comprendre à la limite un peu à quoi tout ça va servir (et encore); mais après, savoir qu'est ce qui se soude avec quoi et tout le reste... Vraiment ça me dépasse mais je cherche toujours a comprendre... Il y a pas de tutoriel sur des robots un peu plus complexe qui explique un peu tout ça ?
#9
seb03000
-

- Membres
-
- 1â¯193 messages
@pump_upp - best crypto pumps on telegram !
- Location:https://t.me/pump_upp
Posté 04 novembre 2011 - 12:32
Bonsoir Roborox .
Comme la dit microrupteurman2 , si tu veux que ton robot puisse être autonome ( c'est toi qui voie ) il faudrez pensé a prendre un capteur .
Donc ta des capteurs de plusieurs sortes a infrarouge a ultrason ou des capteurs de lumière et plein d'autres encore.
Les plus faciles a programmé et les capteurs infrarouges sharp.
Pour commencer à faire ton robot, il te faut les composants.
Voici ce que je te propose.
Donc la base , c'est la carte mère comme on dit.
Une carte
Carte DFRduino
Une Cartes d'extension sa c'est pour té motoreducteur qui te permet de faire avancer ton robot.
Un Servomoteur que tu fixera ton capteur pour détecte les obstacles.
une télécommandecomme tu la dis pour piloter ton robot
Après si tu veux prendre de l'arduino la carte mère ( je c'est pas si tu la fais )il faut que tu télécharges son logiciel pour programmer ton robot donc clic
ici
Voila c'est un bon début.
Pour le chassi soie tu t'en achètes une toute faite , soie tu t'en fabriques une.
La faut être créatifs.
Sur ce hésite pas a posé tes questions on est la pour t'aider .
Comme la dit microrupteurman2 , si tu veux que ton robot puisse être autonome ( c'est toi qui voie ) il faudrez pensé a prendre un capteur .
Donc ta des capteurs de plusieurs sortes a infrarouge a ultrason ou des capteurs de lumière et plein d'autres encore.
Les plus faciles a programmé et les capteurs infrarouges sharp.
Pour commencer à faire ton robot, il te faut les composants.
Voici ce que je te propose.
Donc la base , c'est la carte mère comme on dit.
Une carte
Carte DFRduino
Une Cartes d'extension sa c'est pour té motoreducteur qui te permet de faire avancer ton robot.
Un Servomoteur que tu fixera ton capteur pour détecte les obstacles.
une télécommandecomme tu la dis pour piloter ton robot
Après si tu veux prendre de l'arduino la carte mère ( je c'est pas si tu la fais )il faut que tu télécharges son logiciel pour programmer ton robot donc clic
ici
Voila c'est un bon début.
Pour le chassi soie tu t'en achètes une toute faite , soie tu t'en fabriques une.
La faut être créatifs.
Sur ce hésite pas a posé tes questions on est la pour t'aider .
#10
Guest_Roborox_*
Guest_Roborox_*
-
- Guests
Posté 04 novembre 2011 - 12:42
Merci pour ces éclairage !
Donc la carte mère c'est un peu le cerveau du robot ? Et c'est moi qui peut installer, ajouter et créer des programmation que je pourrai mettre dessus ?
Mais vraiment je bloque toujours, il y a beaucoup déléments déjà, je ne sais pas qu'est ce qui se soude avec quoi, qui alimente qui en énergie, à quoi chaque élément sert vraiment.
Chassi j'ai compris, je vais voir si je le fabrique ou non.
Ensuite en source d'énergie je prends quoi ? Vous avez un lien s'il vous plait ?
Ensuite je place la source d'énergie sur le chassi, et je soude la source d'énergie avec quoi ? Et il faut ajouter des composants (diodes,résistances...) ?
Donc la carte mère c'est un peu le cerveau du robot ? Et c'est moi qui peut installer, ajouter et créer des programmation que je pourrai mettre dessus ?
Mais vraiment je bloque toujours, il y a beaucoup déléments déjà, je ne sais pas qu'est ce qui se soude avec quoi, qui alimente qui en énergie, à quoi chaque élément sert vraiment.
Chassi j'ai compris, je vais voir si je le fabrique ou non.
Ensuite en source d'énergie je prends quoi ? Vous avez un lien s'il vous plait ?
Ensuite je place la source d'énergie sur le chassi, et je soude la source d'énergie avec quoi ? Et il faut ajouter des composants (diodes,résistances...) ?
#11
seb03000
-
- Membres
-
- 1â¯193 messages
@pump_upp - best crypto pumps on telegram !
- Location:https://t.me/pump_upp
Posté 04 novembre 2011 - 12:58
Oui c'est exacte.Donc la carte mère c'est un peu le cerveau du robot ?
Et c'est moi qui peut installer, ajouter et créer des programmation que je pourrai mettre dessus ?
Oui tu pourra rajouté des composants.
Mais vraiment je bloque toujours, il y a beaucoup d’éléments déjà, je ne sais pas qu'est ce qui se soude avec quoi, qui alimente qui en énergie, à quoi chaque élément sert vraiment.
Heuu........ moi perso j'ai rien soudé sur mon robot , après avec les composants que je tes passés en liens tu Nora pas besoin de soudure, car t’auras besoin de c'est fils la , pour les connexions de tes composants donc
ici
Après pour tes soudures ça pourrait consisté a ta création de t'on chassie je pense.
L'alimentation.
Moi perso je suis pas un pro ( mais sinon pour un EX: j'ai pris une batterie d'une voiture télécommandée qui fait 9V6 -650m ah si ça peux t'aider.
À oui sinon tu peux prendre un boîtier a pile comme
se si ou se si
#13
seb03000
-
- Membres
-
- 1â¯193 messages
@pump_upp - best crypto pumps on telegram !
- Location:https://t.me/pump_upp
Posté 04 novembre 2011 - 01:47
Mais il faut bien relier tout ces trucs ? C'est en soudant d'après ce que j'ai vu...
Alors oui est non , si tu prends la carte Artuino , et la carte Cartes d'extension donc celle la elle sans boîte sur la carte arduino grasse aux pins.
Pour les servos,servomoteurs capteur est d'autres composants faux que tu prennes les fils Il faut prendre les fils
mâles/mâle et tu branches ses fils sur les pins de la carte.
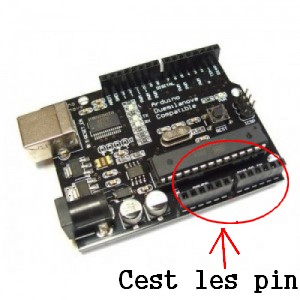
C’est la que tu en boites ta Carte d'extension , sur ta Cartes Arduino puis ta des pins , comme se si sur l'image , la tu branches grasse aux fils , tes servos ,tes servomoteurs , ou des capteurs enfin pleins de choses.
Sinon toutes ces pièces peuvent se trouver dans le commerce ? Un magasin ? Ou c'est principalement par internet ?
Oui tu peux en trouvé dans des magasins spécifiques pour c'est pièce ça dépend d’où tu et bien sûr moi perso je prends sa sur le net.
#14
Microrupteurman
-
- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
Posté 04 novembre 2011 - 12:37
Voila , je pense que u te prend tros la tete. Le fer a souder, on s'en sert pour fabriquer ses capteur et carte.
Je te propose de repartir en haut du sujet et de bien relire, ca fait 3 fois qu'on se repete .
Tu as tout les lien necessaire.
Les connection des cartes ou autre se font uniquement par emboitage de broche, les pins.
J'ai une autre questoin, tu as quel age ?
Je te propose de repartir en haut du sujet et de bien relire, ca fait 3 fois qu'on se repete .
Tu as tout les lien necessaire.
Les connection des cartes ou autre se font uniquement par emboitage de broche, les pins.
J'ai une autre questoin, tu as quel age ?
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#15
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 04 novembre 2011 - 02:05
J'ai une autre questoin, tu as quel age ?
Cf présentation

http://www.robot-maker.com/forum/topic/5743-presentation-roborox/page__p__35512#entry35512
Mon site internet : http://ferdinandpiette.com/
#16
Guest_Roborox_*
Guest_Roborox_*
-
- Guests
Posté 04 novembre 2011 - 03:26
Désolé, je lis tellement de chose que je suis emmêlé ^^ Déjà je veux juste qu'il soit télécommandé.
Donc je récapitule, j'ai besoin :
- D'une source d'énergie (je vais prendre comme toi microrupteurman2)
- Je vais prendre un 4WD Plateforme robotique en kit pour Arduino (V2)(donc plus besoin d'acheter les moteurs) : http://www.zartronic.fr/4wd-plateforme-robotique-en-kit-pour-arduino-v2-p-142.html
- Auquel je dois acheter la carte mère :
DFRduino Romeo Robotique 328 (Compatible Arduino) : http://www.zartronic.fr/dfrduino-romeo-robotique-328-compatible-arduino-p-146.html
Cette carte mère va me servir à installer des programmes (comment pour lui faire dire bonjour ? )
- Je rajoute un Contrôleur de Servo Flyduino-A 12 (Compatible Arduino)qui gère mon servomoteur : http://www.zartronic.fr/contr%C3%B4leur-de-servo-flyduinoa-12-compatible-arduino-p-266.html
- Il me faut un servomoteur, mais j'ai pas compris déjà ce que c'étais même avec des explications sur le forum, je voulais en fait que ma tête tourne pour que la caméra sans fil puisse tourner elle aussi et regarder sous différent angles de vu.
- Le Kit Infrarouge pour Arduino : http://www.arobose.com/shop/kits-electroniques-robot/30-kit-infrarouge-pour-arduino.html
- Une mini caméra sans fil
Déjà avec tous ça, j'ai bien tout ce qu'il faut pour que le robot avance et puisse voir ? Je pourrai compliquer mon robot après avec ce matériel ? (par exemple le compliquer au niveau de la programmation), et puisque j'y suis, quand je voudrai compliquer le robot j'aurai besoin d'une carte extension pour rajouter des choses ?
Rien qu'avec ça, cela fait un total de (sans la source d'énergie où je ne sais pas combien ça coûte) : 200 euros !
Là c'est sur ça reviens un peu cher...
Désolé si je vous fait répéter, je suis un peu nul^^
Donc je récapitule, j'ai besoin :
- D'une source d'énergie (je vais prendre comme toi microrupteurman2)
- Je vais prendre un 4WD Plateforme robotique en kit pour Arduino (V2)(donc plus besoin d'acheter les moteurs) : http://www.zartronic.fr/4wd-plateforme-robotique-en-kit-pour-arduino-v2-p-142.html
- Auquel je dois acheter la carte mère :
DFRduino Romeo Robotique 328 (Compatible Arduino) : http://www.zartronic.fr/dfrduino-romeo-robotique-328-compatible-arduino-p-146.html
Cette carte mère va me servir à installer des programmes (comment pour lui faire dire bonjour ? )
- Je rajoute un Contrôleur de Servo Flyduino-A 12 (Compatible Arduino)qui gère mon servomoteur : http://www.zartronic.fr/contr%C3%B4leur-de-servo-flyduinoa-12-compatible-arduino-p-266.html
- Il me faut un servomoteur, mais j'ai pas compris déjà ce que c'étais même avec des explications sur le forum, je voulais en fait que ma tête tourne pour que la caméra sans fil puisse tourner elle aussi et regarder sous différent angles de vu.
- Le Kit Infrarouge pour Arduino : http://www.arobose.com/shop/kits-electroniques-robot/30-kit-infrarouge-pour-arduino.html
- Une mini caméra sans fil
Déjà avec tous ça, j'ai bien tout ce qu'il faut pour que le robot avance et puisse voir ? Je pourrai compliquer mon robot après avec ce matériel ? (par exemple le compliquer au niveau de la programmation), et puisque j'y suis, quand je voudrai compliquer le robot j'aurai besoin d'une carte extension pour rajouter des choses ?
Rien qu'avec ça, cela fait un total de (sans la source d'énergie où je ne sais pas combien ça coûte) : 200 euros !
Là c'est sur ça reviens un peu cher...
Désolé si je vous fait répéter, je suis un peu nul^^
#17
Guest_Roborox_*
Guest_Roborox_*
-
- Guests
Posté 04 novembre 2011 - 03:28
J'ai oublié de mettre un lien, pour le servo je pensais à ça : http://www.zartronic.fr/servo-standard-5kg-p-87.html
Mais je sais même pas à quoi ça sert
Mais je sais même pas à quoi ça sert
#18
swolf
-

- Membres
-
- 626 messages
Membre chevronné
- Gender:Male
Posté 04 novembre 2011 - 03:49
Bonjour!
Ce servo est bien, mais pour un tourelle tu n'as pas besoin d'un tel couple... Un micro-servo tel que celui-ci devrait largement suffire.
Comme dit plus haut, un servo est un moteur asservi en position, c'est à dire que tu lui envoies (en gros) la position a laquelle tu veux qu'il aille (la plupart du temps sur 180°) et ...il y va C'est donc parfaitement approprié à la création d'une tourelle infra-rouge.
C'est donc parfaitement approprié à la création d'une tourelle infra-rouge.

en esperant t'avoir aidé
Florent
edit: je viens de remarquer que la police d'écriture n'est pas la meme partout ans mon message, ce n'est pas volontaire (je n'ai d'ailleurs aucune idée de l'origine de cela) mais bon ce n'est pas très important
attention, ce n'est pas un contrôleur de moteurs mais une arduino miniature optimisée pour le controle de servos. Je te le déconseille donc. De plus, si tu n'as besoin que d'un servomoteur pour ta tourelle, inutile d'acheter une carte spéciale pour l'alimentation de ceux-ci.Je rajoute un Contrôleur de Servo Flyduino-A 12 (Compatible Arduino)qui gère mon servomoteur : http://www.zartronic...uino-p-266.html
pour le servo je pensais à ça : http://www.zartronic...d-5kg-p-87.html
Mais je sais même pas à quoi ça sert
Ce servo est bien, mais pour un tourelle tu n'as pas besoin d'un tel couple... Un micro-servo tel que celui-ci devrait largement suffire.
Comme dit plus haut, un servo est un moteur asservi en position, c'est à dire que tu lui envoies (en gros) la position a laquelle tu veux qu'il aille (la plupart du temps sur 180°) et ...il y va
C'est donc parfaitement approprié à la création d'une tourelle infra-rouge.Oui, je ne vois rien qui manque. Comme dit plus haut, ce n'est pas le robot qui verra (avec ta camera sans fil) mais bien toi qui verra "par procuration". Je veux dire par là que le robot ne pourras pas utiliser les informations sur son environnement renvoyées par la camera... Mais comme je ne pense pas que c'est ce que tu veux faire, tout va bienDéjà avec tous ça, j'ai bien tout ce qu'il faut pour que le robot avance et puisse voir ?
en esperant t'avoir aidé
Florent
edit: je viens de remarquer que la police d'écriture n'est pas la meme partout ans mon message, ce n'est pas volontaire (je n'ai d'ailleurs aucune idée de l'origine de cela) mais bon ce n'est pas très important
Notre blog, à FJprod et moi: http://2froblog.wordpress.com/
#19
Black Templar
-
- Membres
-
- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 04 novembre 2011 - 09:40
Je n'ai pas vu de carte de puissance pour les moteurs ?? Ex: http://fr.hobbytronics.co.uk/arduino/arduino-ardumoto
Sinon, voila en gros un schéma de principe de ce que tu veux faire :

++
Black Templar
Sinon, voila en gros un schéma de principe de ce que tu veux faire :
++
Black Templar
Mon site internet : http://ferdinandpiette.com/
#20
swolf
-
- Membres
-
- 626 messages
Membre chevronné
- Gender:Male
Posté 04 novembre 2011 - 10:51
Black-templar: je me suis demandé la même chose mais étant donné la dimension de ses moteurs, le l298 de la DFRduino Romeo devrait suffire, non?
Notre blog, à FJprod et moi: http://2froblog.wordpress.com/
Répondre à ce sujet








0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




