

Étant en Terminale S option science de l'ingénieur, je dois actuellement réaliser avec quatre de mes camarades un projet personnel encadré (PPE). Je suis en charge de la partie "Traiter". C'est ainsi que je dois réaliser le programme de commande du robot mais aussi choisir un microcontrôleur. Et c'est là que ça coince, je n'arrive pas à en trouver un en accord avec mes besoins.
Mon microcontrôleur doit comporter 12 entrées-sorties (+ c'est pas grave, - c'est embêtant), 2 sorties OSC pour le quartz et donc la temporisation et surtout 4 sorties MLI.
En effet je dois contrôler deux moteurs à courant continues, dans les deux sens, en faisant varier leur vitesse ^^
De plus autres informations importantes, je ne peux programmer que sur des PIC, re-programmable (donc F) et sur flowcode.
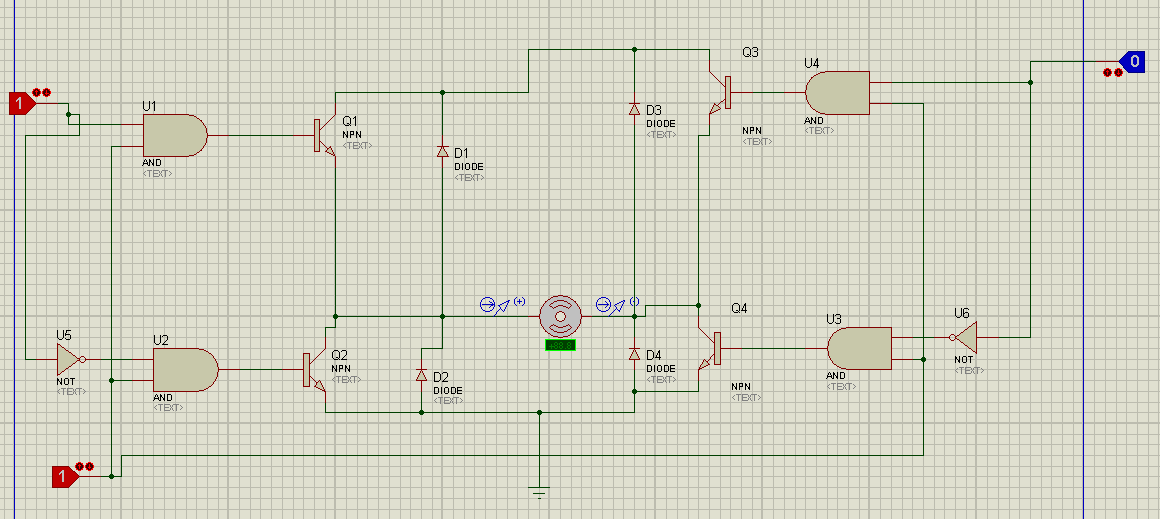
Un de mes camarades s'occupant de la partie électronique, m'a trouvé ce circuit:

(sur ce site web)
Le problème c'est que le seul PIC adapté que j'ai trouvé (avec 4 sorties PWM) est le PIC16F1503, et il est pas programmable sur Flowcode...
L'idéal serait d'avoir une information logique pour commander le sens du moteur (1: dans le sens direct, 0: dans le sens inverse) et de pouvoir commander la vitesse de chacun des des moteurs via une seul sortie PWM.
J'ai vu sur votre même site, ce topic, qui répond à mes attentes, mais que j'ai du mal à le comprendre.
Bref, Merci tout d'abord d'avoir lu ce long et sans doute ennuyant message ^^ et si possible ça serait sympa de m'aider un peu dans ma démarche























{kind=link}