Je viens partager avec vous le développement de mon robot Roby (dsl pour la non originalité de son nom
 ) !
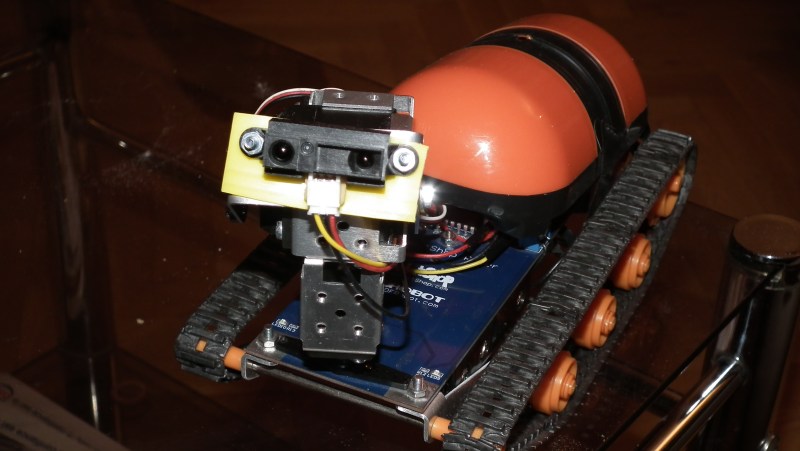
) !Il s'agit d'un robot basé sur arduino, acheté chez robotshop.
De base il sait déjà faire 2/3 trucs, comme se déplacer ce qui n'est déjà pas mal.
Je lui ai ajouté quelques fonctionnalités (antennes, IR Sharp, servo moteur pour guider le sharp), cf les 2/3 images ci-dessous (que j'uploaderai ce soir
 ).
).Mais j'aimerai maintenant passer à la vitesse supérieur en lui donnant.. des yeux
!Dans un premier temps, je compte "tricher" en lui ajoutant mon téléphone Androïd en guise de caméra avec une architecture du genre :
Le tel envoie les data vers un serveur (PC) => le PC traite les données (en auto (à faire) ou via une IHM (une appliweb en java) avec un utilisateur) => le PC renvoi les données au robot (via WIFI a priori).
Cela fonctionne plutôt pas mal, (je n'ai pas encore testé la partie WIFI mais ça marche en USB !), mais c'est assez pénalisant de "sacrifier" mon téléphone pour cette tache !
Je voulais donc savoir si il était possible de mettre une caméra directe sur le robot et d'envoyer les données vers le PC (en WIFI) en passant vers la carte arduino (elle renvoi déjà la valeur du capteur IR par exemple).
Je suis bien conscient que la qualité ne devrait pas être exceptionnelle, mais un 240*320 pixel me suffira amplement !
Ma question est donc la suivante :
Est-ce possible, et si oui comment ?
Merci d'avance !