Effectivement ils sont cher mais j'en ai trouvé d'autres bien moins cher et ayant les même caractéristique, mais ceux que je t'ai indiqué étaient plus détaillés.
Je pense donc prendre 3 joysticks, comme je le disait précédement, un pour le PAN/TILT de la caméra, un autre pour le PAN/TILT de la grue et un troisième pour la translation du plateau.
Si je résume tout les messages que j'ai reçu, et ce que j'ai compris:
Il me faut:
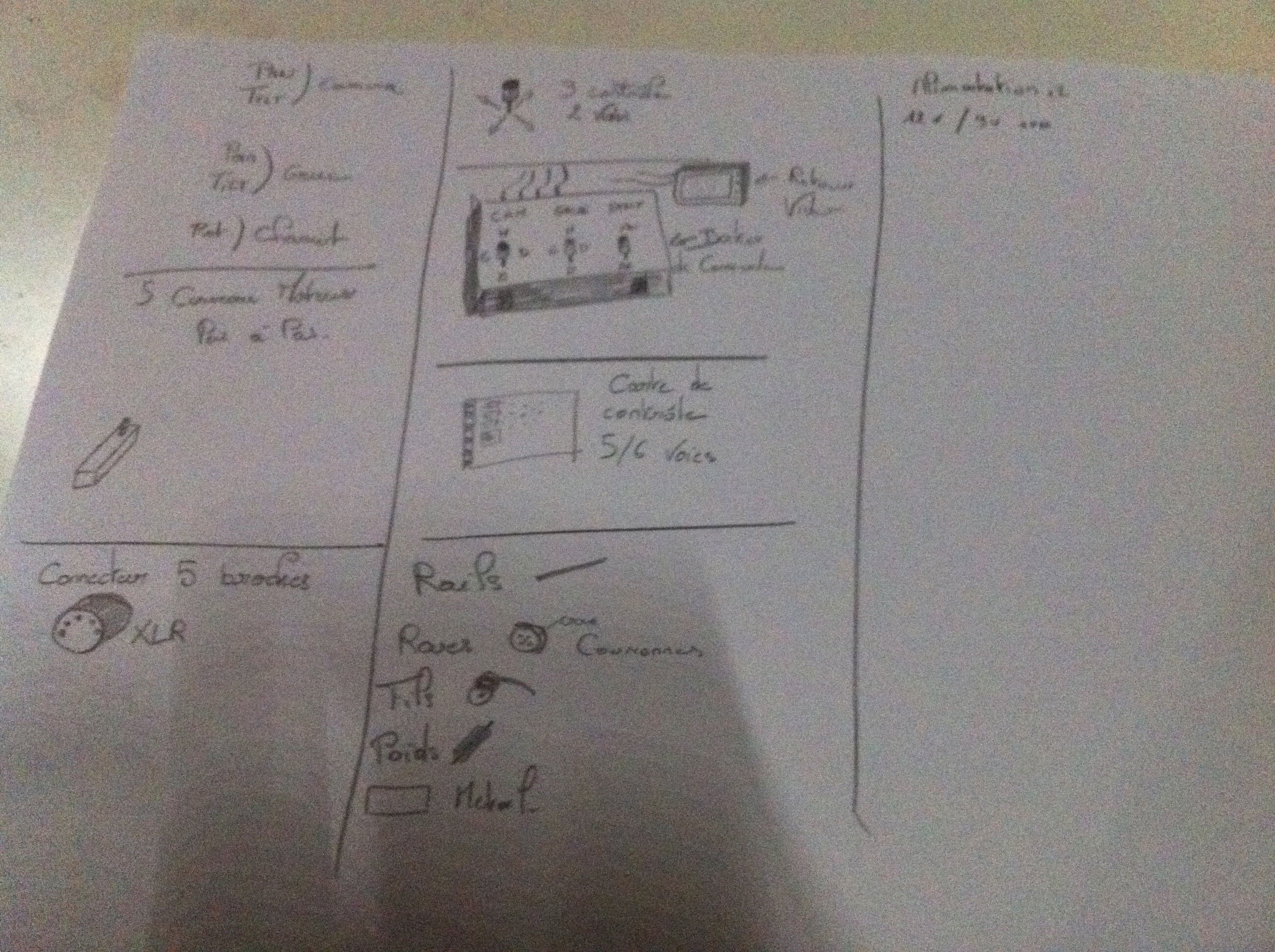
- 5 moteurs CC
- 3 joysticks avec potentiomètre
- de la patience
- du cable
Mais comment je fais pour faire des pont en H pour les moteurs ? Existe t'il des modules tout fait... Où peut être que je rêve un peu trop ...?
Quel serais l'interet d'utiliser un microcontrolleur ?
Tout d'abord : les trois joystick que tu compte utiliser intègre bien chacun deux potentiomètre ?
tu aurais besoin que de 5 potentiomètre (un par moteur ) pour la solution que je peux te proposer . tu en es conscient ?
Pour info il existe aussi des "joystics" avec une seul potentiomètre...
( tout ça c'est juste pour être sur )
En tout cas tu peux très bien faire la solution que je peux te proposer avec 3 joysticks intégrant 2 potentiomètre chacun ( c'est juste que tu en aura un en plus inutile pour l'instant mais il pourra trouver son utilité plus tard

ça c'est l'avantage
)
pour la suite :
ce qu'il te faudrait :
-des moteurs ( 5 ) plusieurs choix : des servo moteurs des moteurs pas à pas ou des moteur cc
-un pont en H ou un montage push pull
dans le cadre de l'utilisation des moteurs CC et ceci pour chaque moteur CC utilisé( ça existe en module tout fait mais il faut les choisir adapté au moteur que tu utilise ) qui te permettra de distribuer l'énergie forte commandé par la partie commande.
Cependant Pas besoin de pont en H pour les servomoteurs mais la commande est spécifique , le distributeur est " intégré " et pour les moteur pas à pas je sais pas j'en ai pas encore utilisé ...
- Une partie commande qui prendra en entré la tension de consigne envoyé par tes potentiomètre ( = joysticks ) et qui enverra la commande en conséquence.
Mais tout d'abord, pour avoir un système de qualité et pour un prix minimum, moi je te propose d'opérer de la façon suivante:
1ère étape
définir au mieux ton cahier des charges : vitesse min et max de la translation et des rotation etc... et les contraintes qu'il doit tenir : les fontions tilt et pan doivent elles faire plusieurs tours ?? etc... Plus tu seras précis, et plus tu auras de données à fournir et mieux on pourra t'aider
à la fin de cette étape le type de certains moteurs ( CC ou servo) aura surement déjà été déterminé mais pas forcément pour tous les moteurs : on verra bien
2ème étape
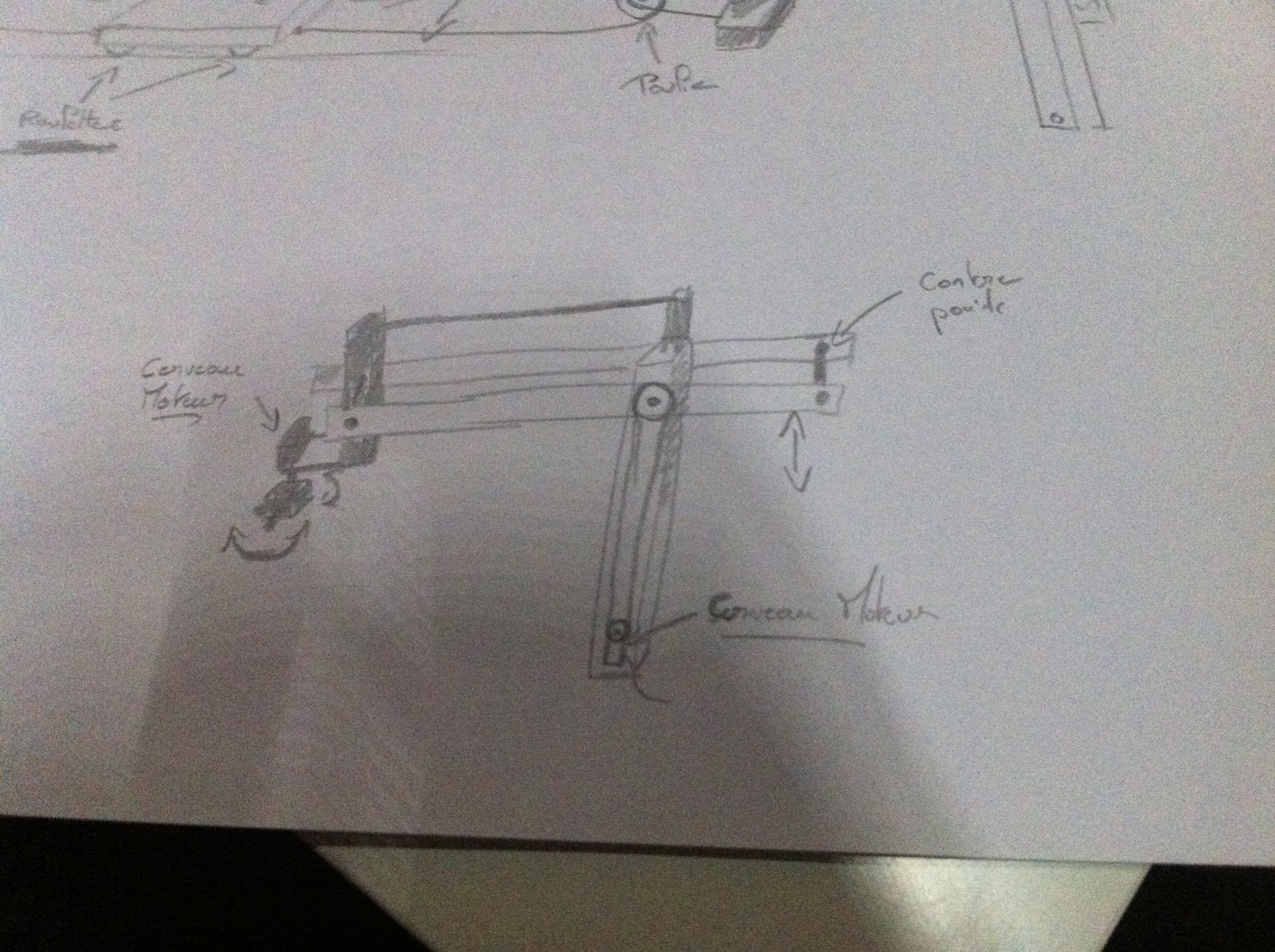
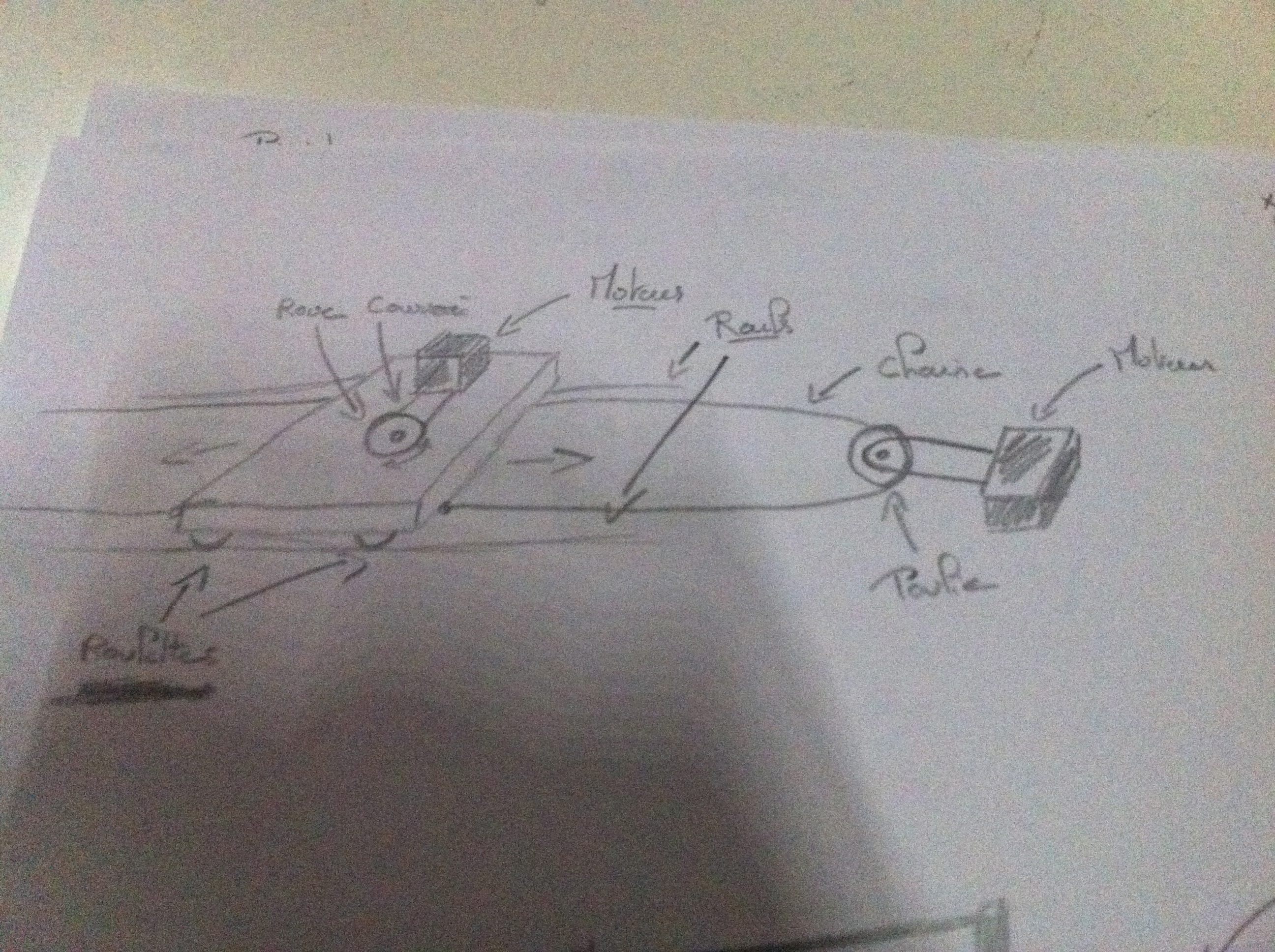
Avoir toute (ou presque ) la partie mécanique fonctionnelle pour pouvoir dimensionner et déterminer les différentes contraintes que tu as sur tes différents moteurs. tu as 5 fonctions différentes, avec chacune ses contraintes (de poids de nombre de tour de couple minimum à fournir de vitesse etc...)
L'objectif final de cette partie étant de connaitre les type de chacun de tes moteurs pour chacune des parties, (important pour la partie commande, car les différents type de moteurs son commandé de manière différentes ) mais aussi leur caractéristique des moteurs ( important pour savoir lesquelles commander de façon à ce qu'ils soient correctement dimensionné : ni surdimensionné ( trop cher ) ni sous dimensionné (non fonctionnel ou risque pour la pérénité du système ) mais c'est aussi important dans le cas du choix des moteur CC car permettra de dimensionner ton distributeur ( pont en H ou push pull )
3ème partie : si besoin ( cas des moteur cc ) choisir et /ou concevoir pour chaque moteur le distributeur adapté à l'énergie forte nécessaire pour le moteur ( Pont en H ou push pull )
4 ème partie : développer, choisir et,ou concevoir la partie commande adaptée au distributeur pour les moteur cc et,ou au servomoteur.
il te faudra aussi de la patience et du travail
Et travailler dans l'ordre exemple : ne commande pas de moteur avant de les avoir dimensionner ... etc... Commence avec un papier et un crayon avant de sortir des câbles
le micro controlleur c'est pour la partie commande :
l'intéret :
il te permettra de contrôler des servomoteur facilement, et/ou de contrôler des moteur cc
tu pourra en plus programmer un comportement spécifique à ton système sans avoir à manipuler toi même tout en gardant la possibilité de le manipuler toi même,
C'est plus facilement évolutif
l'inconvénient :
relativement cher ( faut fouiller un peu ) contrairement a des composant qui ne coutent que 0,32 euro
faut apprendre à programmer
remarques:
il existe des module tout fait, pour les micro contrôleur pour le contrôle de moteur à courant continu. les " motor board ".
les pan/tilt sont très souvent réalisé par des servo donc tu peux aisément trouver des programme tout fait ...
Pour des montages simple ( comme celui ci ) un micro controleur n'est pas forcément nécessaire... 3-4 composant à 0,6 euros peuvent faire l'affaire pour la partie commande ...
concernant les moteurs
il est très dure de contrôler un servomoteur sans microcontrôleur ...
un servomoteur n'est pas physiquement fait pour faire plusieurs tours... mais peut être modifié ( et généralement de manière irréversible ) pour faire plusieurs tours.
Le prix des servomoteurs grimpe vite surtout quand les caractéristique à tenir sont élevé.
Je pense qu'il y a plus de choix parmis les moteurs cc.
Si tu ne souhaite absolument pas passer par un microcontrôleur ( à définir dans le cahier des charge 1ère étape )tu choisis directement des moteurs cc.
Bon maintenant à toi de te mettre au boulot



























{kind=link}