

Mais pour mon clavier , quand j'utiliserais if else , case et des fonctions switch , comment le programme saura que j'appuie sur mon clavier d'ordinateur ?

Membre passionné

Posté 21 mai 2012 - 04:34
Membre chevronné

Posté 21 mai 2012 - 11:23
int EN1 = 6;
int EN2 = 5;
int IN1 = 7;
int IN2 = 4;
void Motor1(int pwm, boolean reverse)
{
analogWrite(EN1,pwm); //définir le contrôle PWM, 0 pour l'arrêt, et 255 pour une vitesse maximale
if(reverse)
{
digitalWrite(IN1,HIGH);//(HAUT)
}
else
{
digitalWrite(IN1,LOW); //(BAS)
}
}
void Motor2(int pwm, boolean reverse)
{
analogWrite(EN2,pwm);
if(reverse)
{
digitalWrite(IN2,HIGH);//(HAUT)
}
else
{
digitalWrite(IN2,LOW);//(BAS)
}
}
void setup()// fonction setup - début de l'exécution du programme
{
int i;
for(i=4;i<=7;i++) //Pour Arduino Shield moteur
pinMode(i, OUTPUT); //régler les broche 4,5,6,7 au mode de sortie
Serial.begin(9600); // ouvre le port série et fixe le debit de communication à 9600 bauds
}
void loop()// fonction loop - est exécutée en boucle , une fois que la fonction setup a été exécutée
{
int x,delay_en;
char val; // déclare une variable char
while(1) // tant que l'expression est vraie
{
val = Serial.read();// lit l'octet entrant
if(val!=-1)
{
switch(val)// debut de la structure
{
case 'w'://Aller de l'avant
//Vous pouvez changer la vitesse, comme moteur (50, true)
Motor1(100,true); //true (=VRAI)
Motor2(100,true);//true (=VRAI)
break;// sortie de la boucle
case 'x'://reculer
Motor1(100,false); //false (= FAUX)
Motor2(100,false);//false (= FAUX)
break;// sortie de la boucle
case 'a'://tourner à gauche
Motor1(100,false);//false (= FAUX)
Motor2(100,true);//true (=VRAI)
break; // sortie de la boucle
case 'd'://tourner à droite
Motor1(100,true); //true (=VRAI)
Motor2(100,false);//false (= FAUX)
break; // sortie de la boucle
case 's'://stop
Motor1(0,false); //false (= FAUX)
Motor2(0,false);//false (= FAUX)
break;// sortie de la boucle
}
}
}
} Membre passionné
Posté 21 mai 2012 - 12:52
val = Serial.read();// lit l'octet entrant
if(val!=-1)
{
switch(val)// debut de la structure
{
case 'w'://Aller de l'avant
//Vous pouvez changer la vitesse, comme moteur (50, true)
Motor1(100,true); //true (=VRAI)
Motor2(100,true);//true (=VRAI)
break;// sortie de la boucle
Membre chevronné
Posté 21 mai 2012 - 01:26
alors le debut j'ai pas compris quelque chose ... qu'est ce que IN(moteur?) et qu'est ce que EN(le en du l293d ? ) ??
int EN1 = 6; int EN2 = 5; int IN1 = 7; int IN2 = 4;
int moteur1 = 6; int moteur2 = 5; int vitesse1 = 7; int vitesse2 = 4;
Membre passionné
Posté 22 mai 2012 - 05:41
) tu déclare tes 2 moteurs au début du code . Ensuite plus bas on a les touches du clavier . Quand tu appuie sur W on a les 2 moteurs qui sont TRUE donc il roule les 2 en même temps(VITESSE 100).Quand tu appui sur X on a les 2 Moteurs qui sont sur FALSE mais avec une vitesse 100 , donc il font marche arrière . Quand tu appuie sur D on a le moteur de droite qui est sur FALSE (vitesse 0) donc il ne bouge pas et le moteur de gauche est sur TRUE (vitesse 100) donc lui tourne normalement , c'est ce qui fait tourner le robot. Pareil pour tourner a gauche ,mais on fait l'inverse. Quand tu appuie sur S les 2 moteurs sont sur FALSE et leurs vitesse est de zéro , donc il ne bouge plus. dis moi si je me suis trompe ou si il manque quelque chose . )et c'est pile ce que j'ai besoin . Après il faudra rajouter le Bluetooth .Je voudrais savoir s'il est bon (Arduino scketch):
)et c'est pile ce que j'ai besoin . Après il faudra rajouter le Bluetooth .Je voudrais savoir s'il est bon (Arduino scketch):
/* controls each motor in an Edge Robotic Arm using data sent from
a Processing Sketch
*/
// set the output pins
// 14-18 are actually analog pins 0-4
int baseMoteurEnablePin = 2;
int baseMoteurPin1 = 3;
int baseMoteurPin2 = 4;
int epauleMoteurEnablePin = 14;
int epauleMoteurPin1 = 15;
int epauleMoteurPin2 = 16;
int coudeMoteurEnablePin = 8;
int coudeMoteurPin1 = 9;
int coudeMoteurPin2 = 10;
int poigneeMotorEnablePin = 5;
int poigneeMotorPin1 = 6;
int poigneeMotorPin2 = 7;
int pinceMotorEnablePin = 11;
int pinceMotorPin1 = 17;
int pinceMotorPin2 = 18;
// set a variable to store the byte sent from the serial port
int incomingByte;
void setup() {
// set the L293D pins as outputs:
pinMode(baseMoteurPin1, OUTPUT);
pinMode(baseMoteurPin2, OUTPUT);
pinMode(baseMoteurEnablePin, OUTPUT);
digitalWrite(baseMoteurEnablePin, HIGH);
pinMode(epauleMoteurPin1, OUTPUT);
pinMode(epauleMoteurPin2, OUTPUT);
pinMode(epauleMoteurEnablePin, OUTPUT);
digitalWrite(epauleMoteurEnablePin, HIGH);
pinMode(coudeMoteurPin1, OUTPUT);
pinMode(coudeMoteurPin2, OUTPUT);
pinMode(coudeMoteurEnablePin, OUTPUT);
digitalWrite(coudeMoteurEnablePin, HIGH);
pinMode(poigneeMoteurPin1, OUTPUT);
pinMode(poigneeMoteurPin2, OUTPUT);
pinMode(poigneeMoteurEnablePin, OUTPUT);
digitalWrite(poigneeMoteurEnablePin, HIGH);
pinMode(pinceMoteurPin1, OUTPUT);
pinMode(pinceMoteurPin2, OUTPUT);
pinMode(pinceMoteurEnablePin, OUTPUT);
digitalWrite(pinceMoteurEnablePin, HIGH);
// start sending data at 9600 baud rate
Serial.begin(9600);
}
void loop() {
// check that there's something in the serial buffer
if (Serial.available() > 0) {
// read the byte and store it in our variable
// the byte sent is actually an ascii value
incomingByte = Serial.read();
// note the upper casing of each letter!
// diferrent lettre pour les directions.
if (incomingByte == 'Q') {
digitalWrite(baseMotorPin1, LOW);
digitalWrite(baseMotorPin2, HIGH);
}
if (incomingByte == 'W') {
digitalWrite(baseMotorPin1, HIGH);
digitalWrite(baseMotorPin2, LOW);
}
if (incomingByte == 'E') {
digitalWrite(epauleMoteurPin1, LOW);
digitalWrite(epauleMoteurPin2, HIGH);
}
if (incomingByte == 'R') {
digitalWrite(epauleMoteurPin1, HIGH);
digitalWrite(epauleMoteurPin2, LOW);
}
if (incomingByte == 'A') {
digitalWrite(coudeMoteurPin1, LOW);
digitalWrite(coudeMoteurPin2, HIGH);
}
if (incomingByte == 'S') {
digitalWrite(coudeMoteurPin1, HIGH);
digitalWrite(coudeMoteurPin2, LOW);
}
if (incomingByte == 'D') {
digitalWrite(poigneeMoteurPin1, LOW);
digitalWrite(poigneeMoteurPin2, HIGH);
}
if (incomingByte == 'F') {
digitalWrite(poigneeMoteurPin1, HIGH);
digitalWrite(poigneeMoteurPin2, LOW);
}
if (incomingByte == 'Z') {
digitalWrite(pinceMoteurPin1, LOW);
digitalWrite(pinceMoteurPin2, HIGH);
}
if (incomingByte == 'X') {
digitalWrite(pinceMoteurPin1, HIGH);
digitalWrite(pinceMoteurPin2, LOW);
}
// si O est envoyer les moteurs ne s'allumeront pas (OFF)
if (incomingByte == 'O') {
digitalWrite(baseMotorPin1, LOW);
digitalWrite(baseMotorPin2, LOW);
digitalWrite(epauleMoteurPin1, LOW);
digitalWrite(epauleMoteurPin2, LOW);
digitalWrite(coudeMoteurPin1, LOW);
digitalWrite(coudeMoteurPin2, LOW);
digitalWrite(poigneeMoteurPin1, LOW);
digitalWrite(poigneeMoteurPin2, LOW);
digitalWrite(pinceMoteurPin1, LOW);
digitalWrite(pinceMoteurPin2, LOW);
}
}
}
Membre chevronné
Posté 22 mai 2012 - 11:49
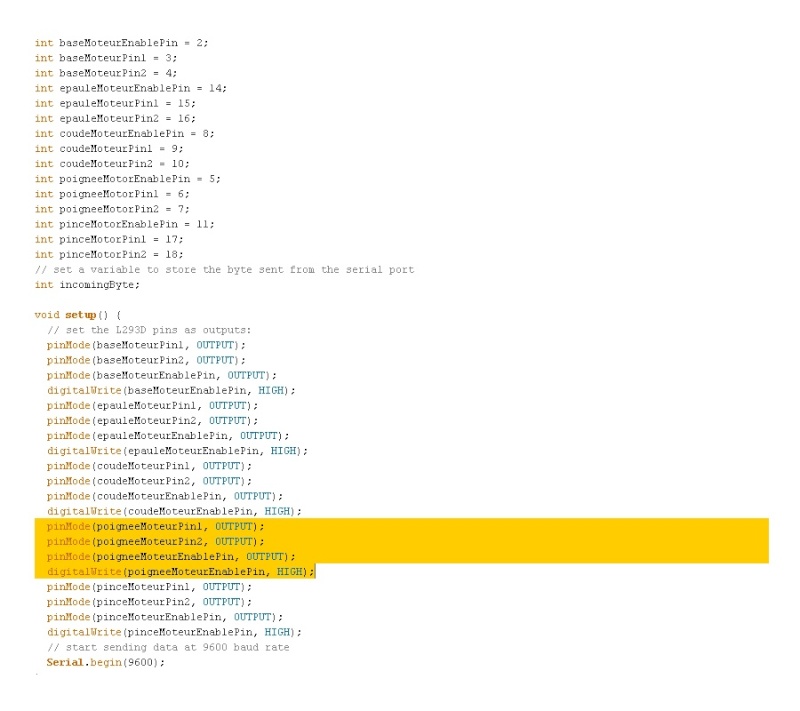
int baseMoteurEnablePin = 2;
int baseMoteurPin1 = 3;
int baseMoteurPin2 = 4;
int epauleMoteurEnablePin = 14;
int epauleMoteurPin1 = 15;
int epauleMoteurPin2 = 16;
int coudeMoteurEnablePin = 8;
int coudeMoteurPin1 = 9;
int coudeMoteurPin2 = 10;
int poigneeMotorEnablePin = 5;
int poigneeMotorPin1 = 6;
int poigneeMotorPin2 = 7;
int pinceMotorEnablePin = 11;
int pinceMotorPin1 = 17;
int pinceMotorPin2 = 18;
// set a variable to store the byte sent from the serial port
int incomingByte;
void setup() {
// set the L293D pins as outputs:
pinMode(baseMoteurPin1, OUTPUT);
pinMode(baseMoteurPin2, OUTPUT);
pinMode(baseMoteurEnablePin, OUTPUT);
digitalWrite(baseMoteurEnablePin, HIGH);
pinMode(epauleMoteurPin1, OUTPUT);
pinMode(epauleMoteurPin2, OUTPUT);
pinMode(epauleMoteurEnablePin, OUTPUT);
digitalWrite(epauleMoteurEnablePin, HIGH);
pinMode(coudeMoteurPin1, OUTPUT);
pinMode(coudeMoteurPin2, OUTPUT);
pinMode(coudeMoteurEnablePin, OUTPUT);
digitalWrite(coudeMoteurEnablePin, HIGH);
pinMode(poigneeMotorPin1, OUTPUT);
pinMode(poigneeMotorPin2, OUTPUT);
pinMode(poigneeMotorEnablePin, HIGH);
pinMode(pinceMotorPin1, OUTPUT);
pinMode(pinceMotorPin2, OUTPUT);
pinMode(pinceMotorEnablePin, OUTPUT);
digitalWrite(pinceMotorEnablePin, HIGH);
// start sending data at 9600 baud rate
Serial.begin(9600);
}
void loop() {
// check that there's something in the serial buffer
if (Serial.available() > 0) {
// read the byte and store it in our variable
// the byte sent is actually an ascii value
incomingByte = Serial.read();
// note the upper casing of each letter!
// diferrent lettre pour les directions.
if (incomingByte == 'Q') {
digitalWrite(baseMoteurPin1, LOW);
digitalWrite(baseMoteurPin2, HIGH);
}
if (incomingByte == 'W') {
digitalWrite(baseMoteurPin1, HIGH);
digitalWrite(baseMoteurPin2, LOW);
}
if (incomingByte == 'E') {
digitalWrite(epauleMoteurPin1, LOW);
digitalWrite(epauleMoteurPin2, HIGH);
}
if (incomingByte == 'R') {
digitalWrite(epauleMoteurPin1, HIGH);
digitalWrite(epauleMoteurPin2, LOW);
}
if (incomingByte == 'A') {
digitalWrite(coudeMoteurPin1, LOW);
digitalWrite(coudeMoteurPin2, HIGH);
}
if (incomingByte == 'S') {
digitalWrite(coudeMoteurPin1, HIGH);
digitalWrite(coudeMoteurPin2, LOW);
}
if (incomingByte == 'D') {
digitalWrite(poigneeMotorPin1, LOW);
digitalWrite(poigneeMotorPin2, HIGH);
}
if (incomingByte == 'F') {
digitalWrite(poigneeMotorPin1, HIGH);
digitalWrite(poigneeMotorPin2, LOW);
}
if (incomingByte == 'Z') {
digitalWrite(pinceMotorPin1, LOW);
digitalWrite(pinceMotorPin2, HIGH);
}
if (incomingByte == 'X') {
digitalWrite(pinceMotorPin1, HIGH);
digitalWrite(pinceMotorPin2, LOW);
}
// si O est envoyer les moteurs ne s'allumeront pas (OFF)
if (incomingByte == 'O') {
digitalWrite(baseMoteurPin1, LOW);
digitalWrite(baseMoteurPin2, LOW);
digitalWrite(epauleMoteurPin1, LOW);
digitalWrite(epauleMoteurPin2, LOW);
digitalWrite(coudeMoteurPin1, LOW);
digitalWrite(coudeMoteurPin2, LOW);
digitalWrite(poigneeMotorPin1, LOW);
digitalWrite(poigneeMotorPin2, LOW);
digitalWrite(pinceMotorPin1, LOW);
digitalWrite(pinceMotorPin2, LOW);
}
}
}
Membre passionné
Posté 22 mai 2012 - 12:13
Membre passionné
Posté 22 mai 2012 - 12:17
Membre chevronné
Posté 22 mai 2012 - 12:26
et après rajouter un bout de code pour contrôler avec bluetooth ?
Membre passionné
Posté 22 mai 2012 - 12:51
. Aurais tu un lien avec des bouts codes sur bluetooth ? En tout cas vraiment merci de ton aide.
Membre chevronné
Posté 22 mai 2012 - 01:14
Membre passionné
Posté 22 mai 2012 - 05:38
Membre chevronné
Posté 23 mai 2012 - 09:53
Le code que tu m'as corrige , sais tu comment les moteurs fonctionnent quand j'appuie sur une touche . Je m'explique plus clairement . Si j'appuie sur W pour avancer , si j'appuie un bref coup sur la touche le robot avancera un tout petit peu , ou avancera t-il quelques dizaines de cm ? si tu n'as pas compris , fais moi signe , j'essaierais d'être plus clair
int EN1 = 6;
int EN2 = 5;
int IN1 = 7;
int IN2 = 4;
void Motor1(int pwm, boolean reverse)
{
analogWrite(EN1,pwm); //définir le contrôle PWM, 0 pour l'arrêt, et 255 pour une vitesse maximale
if(reverse)
{
digitalWrite(IN1,HIGH);//(HAUT)
}
else
{
digitalWrite(IN1,LOW); //(BAS)
}
}
void Motor2(int pwm, boolean reverse)
{
analogWrite(EN2,pwm);
if(reverse)
{
digitalWrite(IN2,HIGH);//(HAUT)
}
else
{
digitalWrite(IN2,LOW);//(BAS)
}
}
void setup()// fonction setup - début de l'exécution du programme
{
int i;
for(i=4;i<=7;i++) //Pour Arduino Shield moteur
pinMode(i, OUTPUT); //régler les broche 4,5,6,7 au mode de sortie
Serial.begin(9600); // ouvre le port série et fixe le debit de communication à 9600 bauds
}
void loop()// fonction loop - est exécutée en boucle , une fois que la fonction setup a été exécutée
{
int x,delay_en;
char val; // déclare une variable char
while(1) // tant que l'expression est vraie
{
val = Serial.read();// lit l'octet entrant
if(val!=-1)
{
switch(val)// debut de la structure
{
case 'w'://Aller de l'avant
//Vous pouvez changer la vitesse, comme moteur (50, true)
Motor1(100,true); //true (=VRAI)
Motor2(100,true);//true (=VRAI)
break;// sortie de la boucle
case 'x'://reculer
Motor1(100,false); //false (= FAUX)
Motor2(100,false);//false (= FAUX)
break;// sortie de la boucle
case 'a'://tourner à gauche
Motor1(100,false);//false (= FAUX)
Motor2(100,true);//true (=VRAI)
break; // sortie de la boucle
case 'd'://tourner à droite
Motor1(100,true); //true (=VRAI)
Motor2(100,false);//false (= FAUX)
break; // sortie de la boucle
case 's'://stop
Motor1(0,false); //false (= FAUX)
Motor2(0,false);//false (= FAUX)
break;// sortie de la boucle
}
}
}
}Membre passionné
Posté 23 mai 2012 - 01:40
Membre passionné
Posté 24 mai 2012 - 08:31
Membre chevronné
Posté 24 mai 2012 - 11:02
Membre passionné
Posté 24 mai 2012 - 01:05
Membre chevronné
Posté 24 mai 2012 - 01:36
Membre passionné
Posté 24 mai 2012 - 06:46
#include <Servo.h> // librairie pour servomoteur
const int SERVO1=11;
const int SERVO2=12;
int ReceptionOctet=0; // variable de stockage des octets reçus par port série
int ReceptionNombre=0; // variable de calcul du nombre reçu par port série
int impulsion=1500; // variable pour impulsion - valeur médiane initiale
Servo servo_1;
Servo servo_2;
void setup() {
servo_1.attach(SERVO1);
servo_2.attach(SERVO1);
Serial.begin(115200);
pinMode(SERVO1, OUTPUT);
pinMode(SERVO2, OUTPUT);
}
void loop(){
if (Serial.available()>0) {
while (Serial.available()>0) {
ReceptionOctet= Serial.read();
ReceptionOctet=ReceptionOctet-48;
if ((ReceptionOctet>=0)&&(ReceptionOctet<=9)) ReceptionNombre = (ReceptionNombre*10)+ReceptionOctet;
delay(1);
}
Serial.print ("Nombre recu= ");
Serial.println(ReceptionNombre);
impulsion=ReceptionNombre;
if (impulsion>2600)impulsion=2500;
if (impulsion<300)impulsion=500;
servo_1.writeMicroseconds(impulsion);
servo_2.writeMicroseconds(impulsion);
Serial.print ("Impulsion servomoteur = ");
Serial.print(impulsion);
Serial.println (" microsecondes ");
delay (1000);
ReceptionNombre=0;
}
}
Membre chevronné
Posté 24 mai 2012 - 08:52








0 members, 1 guests, 0 anonymous users

