Ca y est c'est commencé.
Petit listing de ce qui est installé :
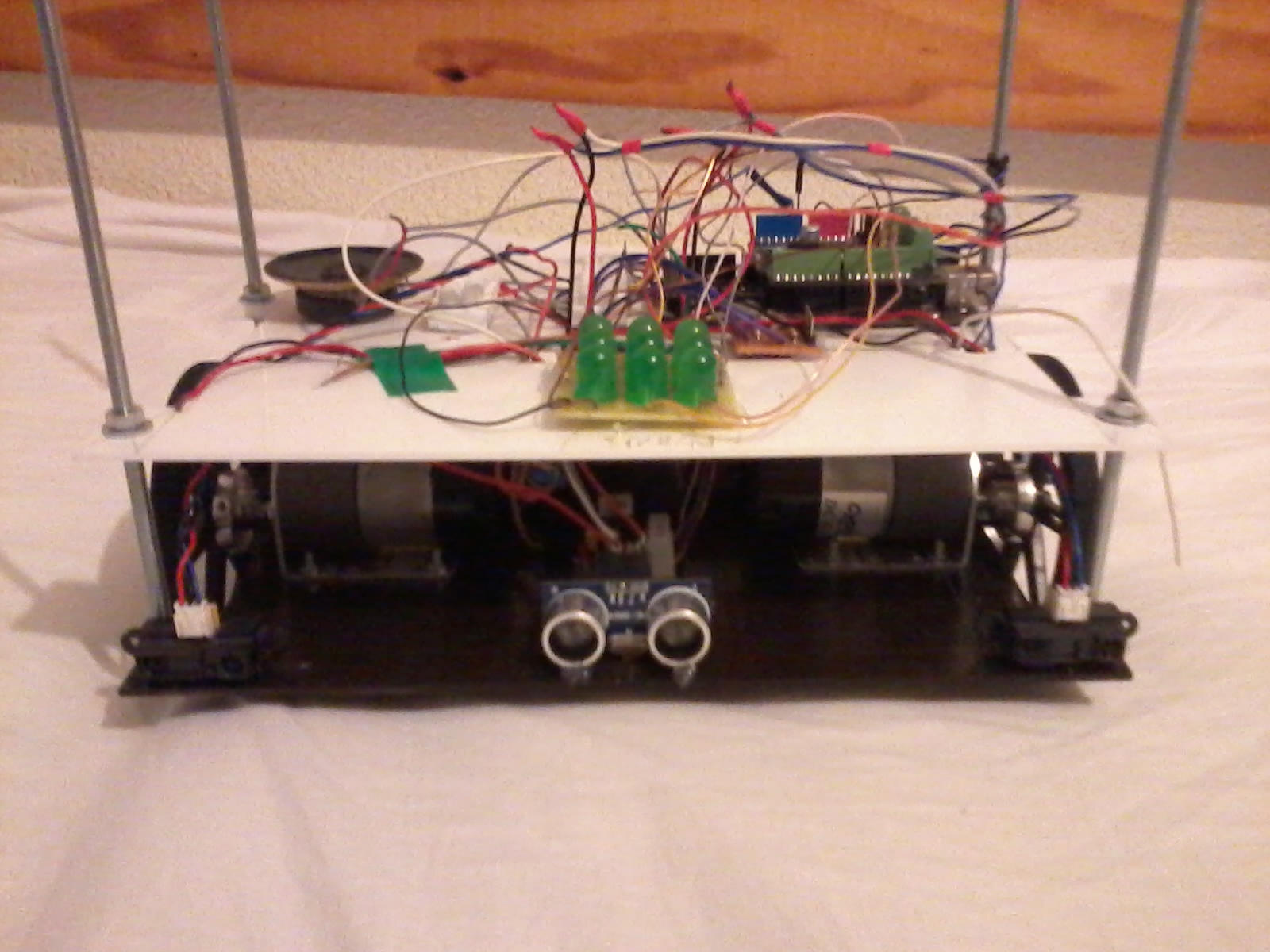
Rdc :
-Accus lipo
-Regulateurs (1A 7v, 5v 5A)
-Capteur IR sharp x2 (lateraux)
-Capteur US Hc sr04 centre (Au passage, ces capteurs sont plus perforament que l' URM 34, qui; je vien de m'en rendre compte dans la conception de l'alternateur, sont trés lent et qui mon fait chi* sur mon precedant robot.... Moi qui croyé que c'etait les sr04 qui beugué !
 )
)-Les deux moteurs avec codeurs.
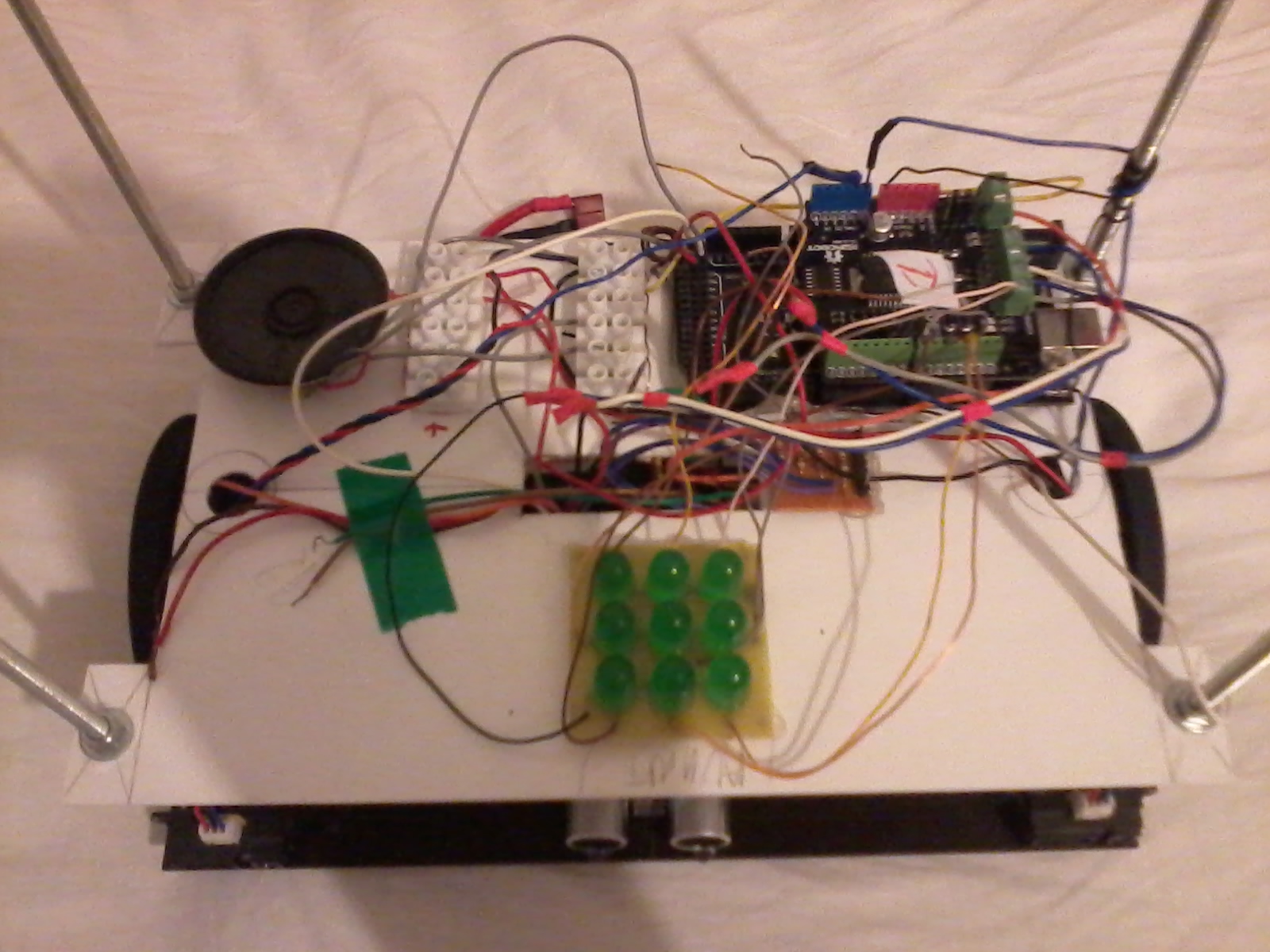
A l'etage :
-Mega2560
-Matrice de led 3x3 8mm verte qui indique le sens de rotation des roue
-Domino pour dispatcher le jus partout ou il y en a besoin
-Hp qui emet un bip different des qu"un capteur capte un obstacle
C'est un festival son et lumiere !

Je mettrai des photos.
Le chassis, rectangulaire 15.5x26cm, est donc en bakélite de 2mm, l'etage en styrene blanc de 2mm, monté avec des tige fileté de 5mm.
Pour les coté, je pense peut etre les faire en fibre comme j'ai tout ce qu'il faut sous la patte, mat300 ou 2x mat100, puis peint.
Voilou voilou.
(ps, donc je me suis pris le Dell comme pc, pour transferé le programme dans l'arduino; il faut.... 2sec !! et aussi mon Toshiba et bien Hs, probleme materiel donc => disque dur hs.)