

J'ouvre un deuxième thread qui ressemble a celui ouvert pour mon bipède. Car décidément, je ne suis pas doué avec mes alimentations de robots

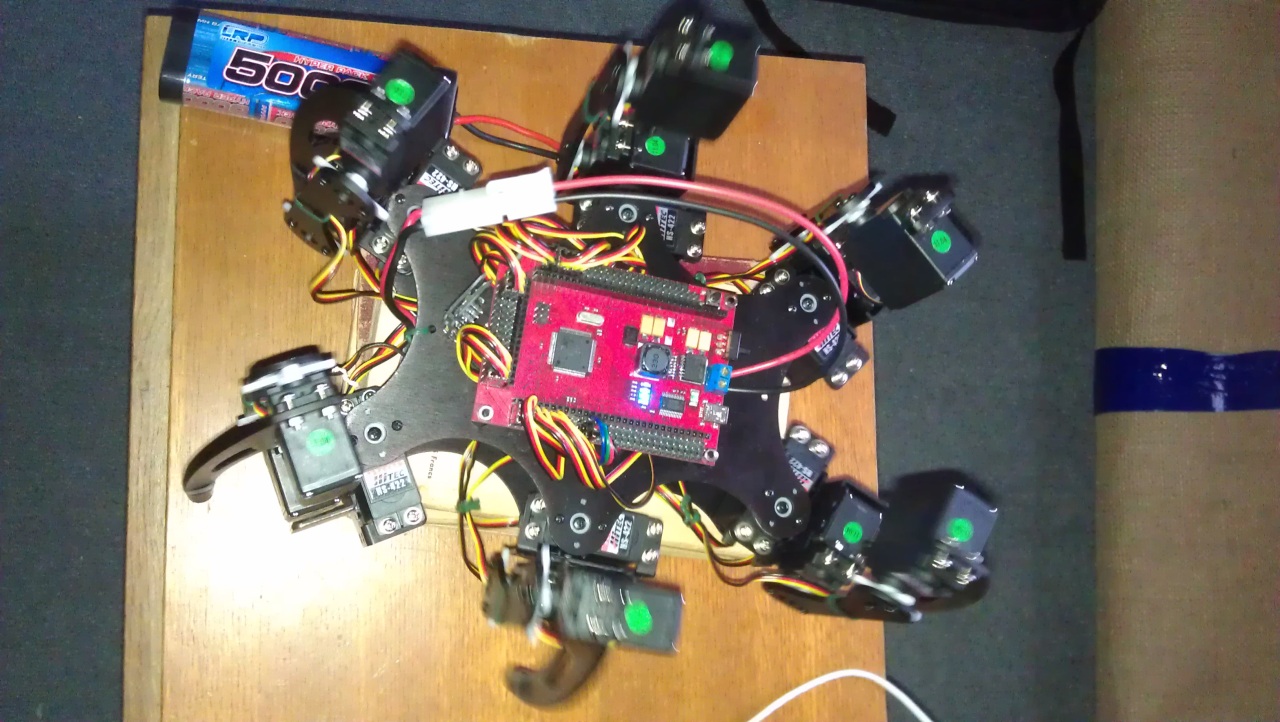
Dans ce cas précis, j'ai une carte compatible Arduino DAGU Spider qui est un peu différente de l'Arduino MEGA2560 que j'utilise sur le bipède (a terme, une autre DAGU Spider est censé remplacer l'imposante MEGA et son shield tout aussi imposant ^^).
Cette carte n'a qu'une seule entrée VIN qui fonctionne de 7v a 30v.
Lorsque je développe le code Arduino, le port USB alimente la carte. mais clairement, l'USB atteint ses limites avec les 18 servos de branché (des Hitec HS422). c'est très lent et les servos ont du mal a se mettre en place (4 a 6 servos, c'est bon, au dessus ce n'est plus ça). L'USB c'est du 5v et 500mA.
J'ai donc acheter deux batteries NiMh de 7.2v : une Lynxmotion de 2800mA/h et une LRP de 5000mA/h (un pour l'hexapode et un autre pour le bipède, en théorie)
Mais lorsque je branche une des batteries (n'importe laquelle), les servos bougent dans tous les sens, la reception BT est brouillé, le code Arduino plante... c'est l'horreur quoi
Je suis complétement perdu... Je pensais que l'alim de la carte aurait suffit pour tout alimenter (idem pour le bipède).
J'ai vu qu'il y avait un blindage spécifique pour les servos pour la DAGU spider.
Est-ce cela veut dire que je dois dupliqué l'alimentation, une pour la carte (pile de 9v ?) et un autre (batterie 7.2v ou 6v ?) pour les servos en utilisant le blindage ?
Les seuls exemples concrets que j'ai trouvé pour le DAGU Spider sont a base de micro-servos, beaucoup moins consommateur d'energie
Sur ce kit complet, ils marquent qu'une seule batterie de 7.4v suffit
Donc... HELP !
PS :
Résoudre ce problème m'aidera pour le bipède aussi ^^ (car ils partageront le même matériel de base
 )
)



















