
Bonjour,
nous avons pour projet de créer un robot, en lien avec notre TPE: "Avancées scientifiques et réalistations techniques".
Sauf que nous n'arrivons pas trop à estimer notre niveau. C'est à dire, à savoir quel robot nous serions capables de faire. (L'idéal serait de le construire entièrement nous même)
Nous avons quelques bases en électronique et plus en programmation, la partie mécanique parait quant à elle assez simple.
1ère idée: Un robot suiveur de ligne
Cette idée est assez intéressante, elle permettrait de montrer le fonctionnement de certains robots industriels.
A priori, c'est l'idée qui nous plait le plus. Le principe a l'air particulièrement intéressant mais aussi compliqué.
Il faudrait de quoi détecter la ligne (Les capteurs), de soutenir l'ensemble (Partie construction qui parait plus aisée), de quoi analyser et ordonner (Partie programmation) et enfin de quoi déplacer (Partie électronique / mécanique).
Que pensez vous de cette idée ? Est-ce que nous avons le temps d'apprendre entre maintenant et février ou son principe est largement trop compliqué ?
2ème idée: Un robot qui esquive les obstacles
Cette idée secondaire permettrait de représenter le fonctionnement d'un robot électroménager comme l'aspirateur, le robot devra donc capter l'obstacle, et ensuite effectuer une rotation. (Ainsi de suite) Il faudrait des capteurs sensibles au contact ou au "visuel", et à priori la même chose que pour le 1 er robot.
Nous sommes au début de ce projet, nous souhaitons partager ici notre avancée, selon votre réaction. Vos aides et vos opinions sont la bienvenue.
Merci d'avance.
Bisous bisous

11 réponses à ce sujet
#2

Francky
-

- Membres
-

- 967 messages
Membre passionné
- Gender:Male
Posté 20 novembre 2012 - 06:05
Salut,
En fait, dans les deux cas vous pouvez faire des choses simples (même pour certains trucs sans programmation) et des très complexes (trop chères et trop dures à traiter à votre niveau).
Mais bon après vous pouvez toujours faire votre tpe, l'un des robots et le présenter comme l'illustration d'un principe.
Allez faire un tour du côté des tutoriels du forum (et, plus particulièrement, du côté des 2 versions de "roby"). Je pense que ça pourra vous aider et vous donner des idées
Bon courage !
PS : 1ère SI ?
En fait, dans les deux cas vous pouvez faire des choses simples (même pour certains trucs sans programmation) et des très complexes (trop chères et trop dures à traiter à votre niveau).
Mais bon après vous pouvez toujours faire votre tpe, l'un des robots et le présenter comme l'illustration d'un principe.
Allez faire un tour du côté des tutoriels du forum (et, plus particulièrement, du côté des 2 versions de "roby"). Je pense que ça pourra vous aider et vous donner des idées
Bon courage !
PS : 1ère SI ?
#3
Mike118
-

- Administrateur
-
- 10â¯304 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 21 novembre 2012 - 08:24
Mes avis :
Ne pas négliger la partie mécanique.
Le plus simple est selon moi l'éviteur d'obstacle.
Comme l'a dit francky il est largement possible de réaliser ce dernier sans programmation pour un prix réduit.
( il est plus délicat de faire de même avec un suiveur de ligne mais pas impossible )
Trouvez votre problématique afin que la création du robot soit justifié et pas qu'elle soit juste là pour faire joli.
Et surtout : Prenez y du plaisir et ammusez vous bien !
Ne pas négliger la partie mécanique.
Le plus simple est selon moi l'éviteur d'obstacle.
Comme l'a dit francky il est largement possible de réaliser ce dernier sans programmation pour un prix réduit.
( il est plus délicat de faire de même avec un suiveur de ligne mais pas impossible )
Trouvez votre problématique afin que la création du robot soit justifié et pas qu'elle soit juste là pour faire joli.
Et surtout : Prenez y du plaisir et ammusez vous bien !
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#4
Francky
-
- Membres
-
- 967 messages
Membre passionné
- Gender:Male
Posté 21 novembre 2012 - 07:49
Un jour il faudra que je vous propose mon circuit. Un truc tout con mais qui a l'air de fonctionner. Mais bon, j'aurai aimé mettre une carcasse mécanique sur mon projet avant "^^il est plus délicat de faire de même avec un suiveur de ligne mais pas impossible
#5
Mike118
-
- Administrateur
-
- 10â¯304 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 22 novembre 2012 - 05:23
Un jour il faudra que je vous propose mon circuit. Un truc tout con mais qui a l'air de fonctionner. Mais bon, j'aurai aimé mettre une carcasse mécanique sur mon projet avant "^^
Ce sont souvent les truc tout con qui fonctionnent le mieux
par contre par curiosité je veux bien que tu me montre ton circuit moi mon premier robot à été le robot éviteur d'obstacle sans contact : il allait tout droit sauf quand un obstacle se trouvait sur son chemin et dans ce cas il tournait à droite. ( ça lui arrivait des fois de tourner en rond mais à par les pieds de chaise il ne se prenait pas d'obstacles ^^ )
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#8
J-C
-
- Membres
- 6 messages
Nouveau membre
Posté 26 janvier 2013 - 06:12
Bonsoir bonsoir !
Je reviens ici après une longue période d'absence.
Ce robot était une très bonne idée, ils nous offrent une expérience assez intéressante.
J'aurais donc besoin de votre aide, en effet nous aurions besoin de notre robot pour le Mardi qui vient mais nous sommes un peu en retard et avec tous les problèmes que nous avons rencontrés, le robot n'est pas finit.
Notre principal problème en ce moment est le capteur de contact. Nous ne savons pas quelle valeur doivent avoir les résistances, et nous ne savons pas ou la trouver. On a pour le moment essayer avec des 10 000 ohms mais le résultat obtenu était assez ... particulier.
Pourriez vous nous aider ?
Je reviens ici après une longue période d'absence.
Ce robot était une très bonne idée, ils nous offrent une expérience assez intéressante.
J'aurais donc besoin de votre aide, en effet nous aurions besoin de notre robot pour le Mardi qui vient mais nous sommes un peu en retard et avec tous les problèmes que nous avons rencontrés, le robot n'est pas finit.
Notre principal problème en ce moment est le capteur de contact. Nous ne savons pas quelle valeur doivent avoir les résistances, et nous ne savons pas ou la trouver. On a pour le moment essayer avec des 10 000 ohms mais le résultat obtenu était assez ... particulier.
Pourriez vous nous aider ?
#9
Mike118
-
- Administrateur
-
- 10â¯304 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 26 janvier 2013 - 10:07
On est samedi et vous en avez besoin pour mardi ???
Vous vous y prenez pas un peu tard non???
Moi je veux bien vous aider ... Mais je ne garantis pas que vous serez dans les temps car en aucun cas je ne ferais le boulot à votre place ...
Tout d'abord :
Vous parlez d'un robot pas fini mais ... qu'est ce qui est déjà fait ?
vous parlez d'un capteur de contact mais.... quel capteur de contact ? vous parlez d'un micro rupteur ?
De quel résistance parlez vous et sur quel montage électronique ?
Quel est ce résultat un peu particulier ?
Bref : postez des photos de tout ce que vous avez déjà fait, postez un schémas du montage électronique donnez plus d'explication sur le problème rencontré et on en reparle après !
à bientôt !
Vous vous y prenez pas un peu tard non???
Moi je veux bien vous aider ... Mais je ne garantis pas que vous serez dans les temps car en aucun cas je ne ferais le boulot à votre place ...
Tout d'abord :
Vous parlez d'un robot pas fini mais ... qu'est ce qui est déjà fait ?
vous parlez d'un capteur de contact mais.... quel capteur de contact ? vous parlez d'un micro rupteur ?
De quel résistance parlez vous et sur quel montage électronique ?
Quel est ce résultat un peu particulier ?
Bref : postez des photos de tout ce que vous avez déjà fait, postez un schémas du montage électronique donnez plus d'explication sur le problème rencontré et on en reparle après !
à bientôt !
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#10
J-C
-
- Membres
- 6 messages
Nouveau membre
Posté 27 janvier 2013 - 02:06
Coucou, merci pour ta réponse Mike.
A vrai dire, nous ne sommes pas noter Mardi mais nous passons un Oral blanc afin que nos enseignants nous aident et corrigent nos erreurs, et l'idéal serait de pouvoir leur présenter notre robot.
Ne t'inquiète pas je souhaite pas te voir faire notre boulot, simplement nous sommes coincés au niveau des capteurs de contacts au niveau des branchages et des résistances.
Nous suivons le tuto de roby, la partie mécanique du robot est finie, la partie électronique au niveau de l'alimentation et des servomoteurs l'est aussi et il nous manque la partie sur les capteurs. (Infrarouge et contact)
Voici les petits capteurs de contact que nous avons:
http://www.robotshop.com/productinfo.aspx?pc=RB-Tam-71&lang=fr-CA
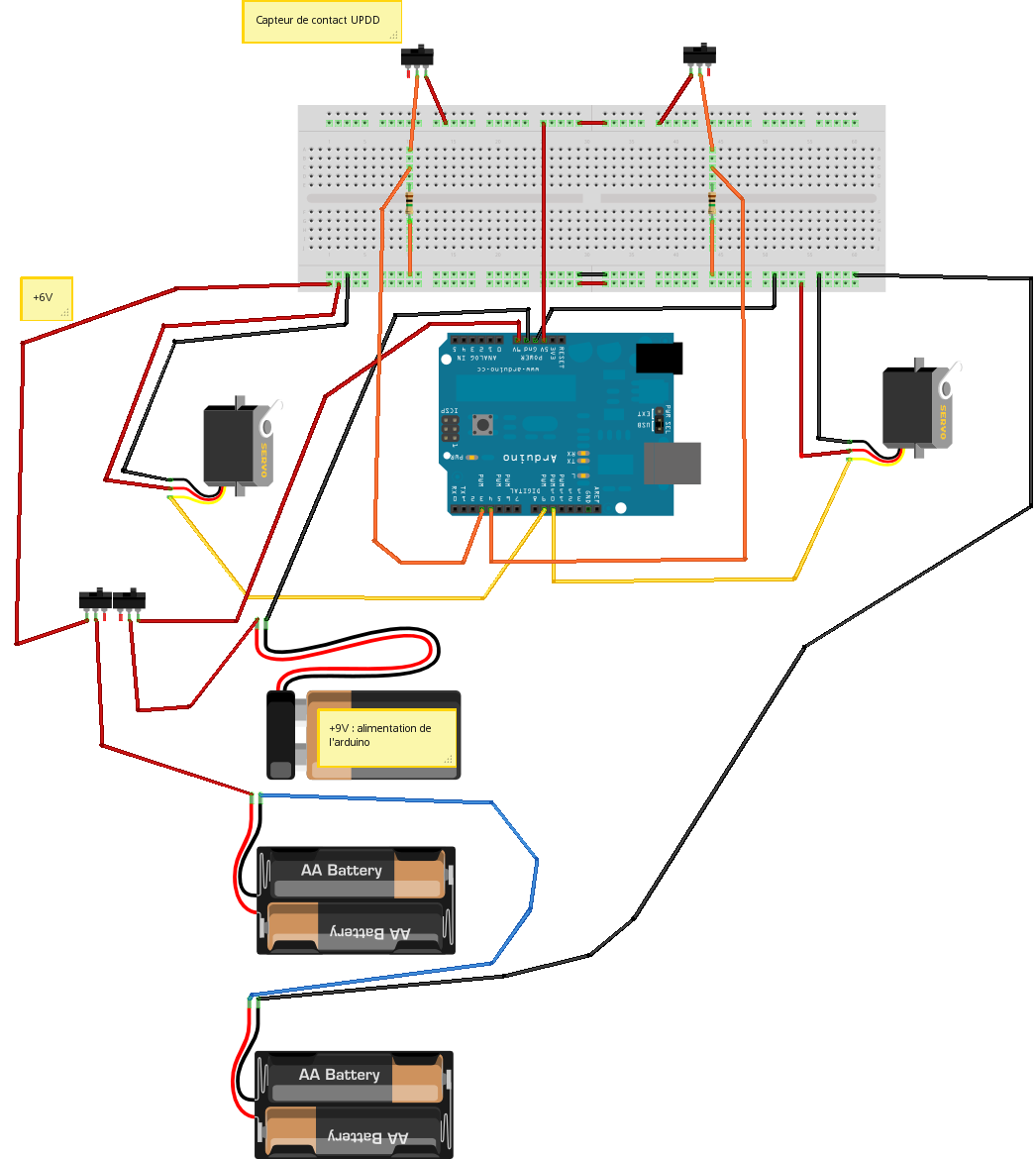
Voici une petite photo de notre robot à l'heure d'aujourd'hui:

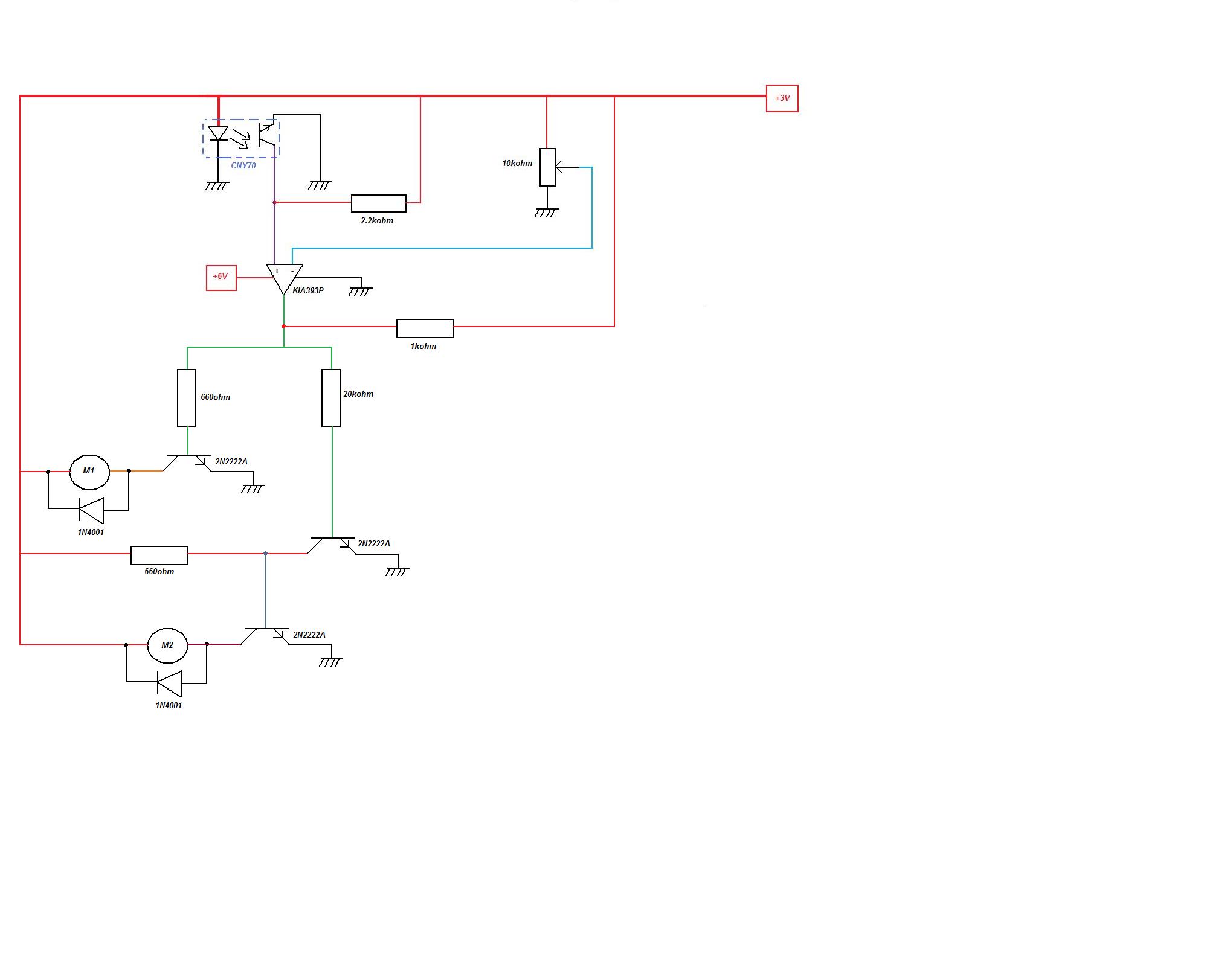
Voici le schéma électronique (je crois bien que ça s'appelle comme ça ?) de notre robot, nous utilisons celui de Roby:
Le résultat particulier qu'on obtenait était l'activation en permanence des capteurs, le robot faisait en effet un demi tour à chaque fois />.
/>.
D'ou mes 2 questions:
Devrions nous faire des soudures au niveau des pattes des capteurs afin de "brancher" les fils ?
Est ce que les résistances Marron Noir Verte Argent (celles utilisés dans ce schéma) pourraient convenir ?
Désolé si je ne suis pas toujours très clair :s
A vrai dire, nous ne sommes pas noter Mardi mais nous passons un Oral blanc afin que nos enseignants nous aident et corrigent nos erreurs, et l'idéal serait de pouvoir leur présenter notre robot.
Ne t'inquiète pas je souhaite pas te voir faire notre boulot, simplement nous sommes coincés au niveau des capteurs de contacts au niveau des branchages et des résistances.
Nous suivons le tuto de roby, la partie mécanique du robot est finie, la partie électronique au niveau de l'alimentation et des servomoteurs l'est aussi et il nous manque la partie sur les capteurs. (Infrarouge et contact)
Voici les petits capteurs de contact que nous avons:
http://www.robotshop.com/productinfo.aspx?pc=RB-Tam-71&lang=fr-CA
Voici une petite photo de notre robot à l'heure d'aujourd'hui:
Voici le schéma électronique (je crois bien que ça s'appelle comme ça ?) de notre robot, nous utilisons celui de Roby:
Le résultat particulier qu'on obtenait était l'activation en permanence des capteurs, le robot faisait en effet un demi tour à chaque fois
/>.D'ou mes 2 questions:
Devrions nous faire des soudures au niveau des pattes des capteurs afin de "brancher" les fils ?
Est ce que les résistances Marron Noir Verte Argent (celles utilisés dans ce schéma) pourraient convenir ?
Désolé si je ne suis pas toujours très clair :s
#11
Mike118
-
- Administrateur
-
- 10â¯304 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 27 janvier 2013 - 02:37
Bonjour,
Dejà, tu me rassure je vois que vous avez presque tout.
Ensuite sache que les résistances sur ton montage sont appelées des résistance pull down ( = mise à la masse ) car elle sont reliée entre un point qui n'est pas pas toujours connecté à quelque chose (en dehors de la résitance et de ton arduinon)et la masse. Du coup grace à cette résistance quand rien n'est connecté (= microrupteur non passant ), tu met le point "à la masse " via la résistance et donc ta arduino voit ce point à 0V. Si il n'y avait pas la résistance de connecté quand le micro rupteur est non passant le point ne serait relié à plus rien du tout, on dit dans ces cas là que le port est " en l'aire" . Ainsi ta arduino n'aurait pas de valeur de tension à lire car aucune ne serait imposée puisque rien ni serait branché c'est une chose à éviter quand on cherche à lire un port.
ensuite fais un test en branchant un voltmetre aux bornes de tes résistance et mesure la tension quand tu appuis et quand tu relaches lse micro-rupteur. Si la valeur change c'est que ce n'est pas un problème de faux contact/>
Dans ce cas ça serait plus un problème de code ou de branchement inversé des micro-rupteur par rapport au code.
Essaye de rallumer ton robot en le faisant tourner dans le vide et appuis sur les micro-rupteurs pour voir ce que cela donne.
Dans le cas où la valeur ne change pas vérifie ton branchement. Si tu as toujours 0V c'est un problème au niveau de ton micro-rupteurs. Si tu as toujours 5V c'est soit que ta résistance n'est pas reliéa à la masse soit que tu as branché la résistance sur la mauvaise patte du micro rupteur.
Autre détail, ton montage ( vu en photo ) ne correspondant pas exactement au schémas (vu que toi tu as deux bread board) as tu bien vérifié que tu as connecté toutes les masse entre elles ? En effet avec ce petit bazard de fils je ne suis pas capable de certifier que tout est bien brancher ^^ Donc on ne sait jamais vérifie bien.
Si tout ce que je te propose ne révèle rien envois une vidéo de ton robot avec son bug =)
Bon courage et à bientôt !
Dejà, tu me rassure je vois que vous avez presque tout.
Ensuite sache que les résistances sur ton montage sont appelées des résistance pull down ( = mise à la masse ) car elle sont reliée entre un point qui n'est pas pas toujours connecté à quelque chose (en dehors de la résitance et de ton arduinon)et la masse. Du coup grace à cette résistance quand rien n'est connecté (= microrupteur non passant ), tu met le point "à la masse " via la résistance et donc ta arduino voit ce point à 0V. Si il n'y avait pas la résistance de connecté quand le micro rupteur est non passant le point ne serait relié à plus rien du tout, on dit dans ces cas là que le port est " en l'aire" . Ainsi ta arduino n'aurait pas de valeur de tension à lire car aucune ne serait imposée puisque rien ni serait branché c'est une chose à éviter quand on cherche à lire un port.
ensuite fais un test en branchant un voltmetre aux bornes de tes résistance et mesure la tension quand tu appuis et quand tu relaches lse micro-rupteur. Si la valeur change c'est que ce n'est pas un problème de faux contact
/>Dans ce cas ça serait plus un problème de code ou de branchement inversé des micro-rupteur par rapport au code.
Essaye de rallumer ton robot en le faisant tourner dans le vide et appuis sur les micro-rupteurs pour voir ce que cela donne.
Dans le cas où la valeur ne change pas vérifie ton branchement. Si tu as toujours 0V c'est un problème au niveau de ton micro-rupteurs. Si tu as toujours 5V c'est soit que ta résistance n'est pas reliéa à la masse soit que tu as branché la résistance sur la mauvaise patte du micro rupteur.
Autre détail, ton montage ( vu en photo ) ne correspondant pas exactement au schémas (vu que toi tu as deux bread board) as tu bien vérifié que tu as connecté toutes les masse entre elles ? En effet avec ce petit bazard de fils je ne suis pas capable de certifier que tout est bien brancher ^^ Donc on ne sait jamais vérifie bien.
Si tout ce que je te propose ne révèle rien envois une vidéo de ton robot avec son bug =)
Bon courage et à bientôt !
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#12
Firas Sakly
-

- Membres
- 1 messages
Nouveau membre
Posté 03 novembre 2014 - 11:07
salut mes amis..je suis un étudiant tunisien de l'ecole nationale d'ingénieur de Monastir..j'est besoin de quelques exemples de l'architecture d'un robot suiveur de ligne et éviteur d'obstacles et leur programmation en C..est-ce que vous pouvez m'aider et merci
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




