


- prioritairement => voir si c'est possible à faire facilement par un amateur, et là je ne pense pas seulement à l'électronique mais surtout à la partie mécanique, et plus particulièrement au système de potar de recopie sur l'axe moteur.
- pas chers, il en faut une vingtaine, peut-être plus.
- de pouvoir les faire facilement, pour la même raison.
- petite taille, pas d'usine à gaz pour chaque servo, un bipède n'est pas un entrepôt et il faut pouvoir tout caser facilement au final.
- il va falloir être tolérant avec mes travaux, je ne connaissais pas LTspice que j'ai découvert par Black Templar et je passe plus de temps à apprendre et essayer de modéliser correctement mes idées qu'à réfléchir au projet. Tout s'apprend mais il faut le temps au temps.
On verra bien si tout çà aboutit à quelque chose avec le cahier des charges exprimé au dessus.
Je repars de zéro, histoire de me faire mon truc à moi, et que si ça intéresse quelqu'un on puisse tout retrouver du début à la fin dans le même sujet. Je vous invite à exprimer critiques, conseils et nouvelles idées, histoire de faire avancer le truc ^^.
Donc on repose les postulats de départ:
- 0 0 ça ne tourne pas.
- 1 1 ça ne tourne pas.
- 1 0 ça tourne dans un sens.
- 0 1 ça tourne dans l'autre sens.
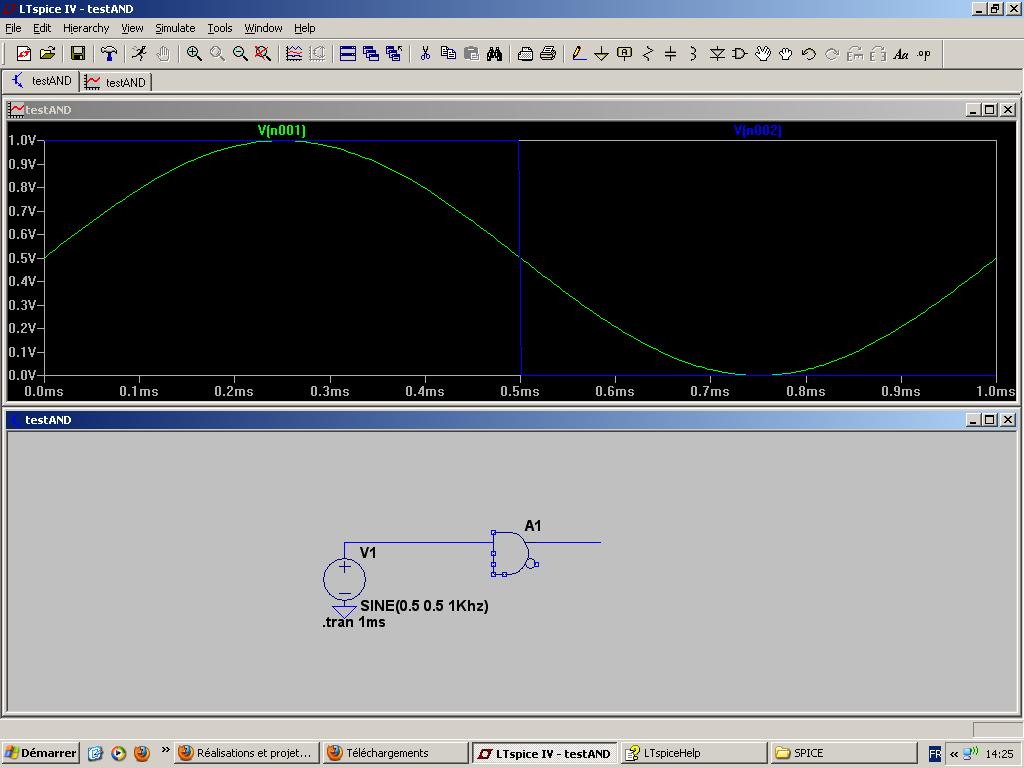
Pour alimenter un pont en H il faut deux signaux complémentaires, je n'ai travaillé pour le moment que sur un seul. Je ne sais pas si c'est possible de simuler un potentiomètre sur LTSpice, ce sera donc en faisant varier les valeurs de R1 et R2 qui représentent la RV de recopie sur l'axe moteur.
J'aurai pu faire la source PWM mais je ne connais pas les valeurs du rapport cyclique d'un signal PWM Arduino, je le ferai quand j'aurai fais des mesure à l'oscillo sur mon UNO à l'occasion. Pour l'instant je simule le signal PWM intégré par une source de tension.
On a bien les signaux de sortie haut ou bas suivant la valeur de R1/R2 par rapport à l'entrée In+. Ça fonctionne aussi avec d'autres valeurs de "PWM_intégré".


Maintenant il faut voir à partir de cette idée de base si et comment on peut générer une deuxième sortie pour alimenter le pont en H, tout en respectant la table de vérité énoncée plus haut.
Edit: j'ai merdouillé et le sujet est doublé. Désolé, si un modo peut effacer le sujet vide...



























{kind=link}