
Bonjour, alors voilà je suis un passionner de robotique mais je n'y connais pas grand chose alors merci de bien vouloir m'aider.
Mon projet : fabriquer un petit robot suiveur de ligne et si possible qu'il évite les obstacle sur la ligne ( préférence que la ligne soit noir sur un font blanc )
Pour le matériel à utiliser je préférèrent utiliser un carte "DFRduino Roméo" car il n'y a pas besoin de souder et je peut la récupérer pour un autre projet .
Pour la programmation je voudrais utiliser le logiciel "risbee" sur windows 7 il m'a l'air simple et je l'ai déjà un peut manipuler
Alors je voudrais savoir (si possible) :
Quel autre matériel à utiliser et le prix
Comment assembler tout le matériel pour créer le robot
Et comment programmé le robot
À oui j'oublié si possible que mon robot sois à pile ou rechargeable mais pas a fils
MERCI POUR TOUT SAMUELFER

#1

-
- Membres
- 21 messages
Nouveau membre
Posté 16 janvier 2013 - 12:22
#3
-

- Membres
-

- 1â¯430 messages
Membre
- Gender:Male
- Location:Lille
Posté 18 janvier 2013 - 07:12
As-tu fait des recherches par toi même pour commencer ?
Ce genre de robot à déjà été traité des centaines de fois ....
http://www.robot-maker.com/forum/tutorials/article/40-systeme-suiveur-de-ligne/
http://www.robot-maker.com/forum/tutorials/article/10-roby/
Mon site internet : http://ferdinandpiette.com/
#5
-

- Membres
- 15 messages
Nouveau membre
- Gender:Male
- Location:Offekerque
- Interests:petitzavions
Posté 19 janvier 2013 - 06:48
Oui j'ai déjà fait des recherche mes aucun site n'explique comment le construire avec tout les étape (j'ai que 13 ans et je m'y connais pas trop )
1° qu'as tu comme matériel (pièces électronique, vieux jouets électrique, bricoles)
2° tu es en quelle classe, ce n'est pas un jugement de valeur mais pour pouvoir expliquer certaines notions
3° tu possèdes quoi comme outillage (ton père) les outils électriques peuvent être dangereux si on n'a pas appris à les utiliser
4° quel budget
deux solutions : 1 utilisation d'une carte genre arduino ou un pic
2 en logique cablée (portes logiques- et ampli Op)
tu doit d'abord établir un cahier des charges (grand mot) cela consiste à écrire sur du papier ce que ton robot doit faire. (exemple : suivre la ligne)
mais que fait il quand il perd la ligne, ou quand il rencontre un obstacle.
Le mieux est decommencer par un robot qui suit la ligne et qui s'arrête quand il ne la voit plus.
Je te laisse réfléchir
#6
-

- Administrateur
-
- 10â¯165 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 19 janvier 2013 - 07:21
1° qu'as tu comme matériel (pièces électronique, vieux jouets électrique, bricoles)
2° tu es en quelle classe, ce n'est pas un jugement de valeur mais pour pouvoir expliquer certaines notions
3° tu possèdes quoi comme outillage (ton père) les outils électriques peuvent être dangereux si on n'a pas appris à les utiliser
4° quel budget
deux solutions : 1 utilisation d'une carte genre arduino ou un pic
2 en logique cablée (portes logiques- et ampli Op)
tu doit d'abord établir un cahier des charges (grand mot) cela consiste à écrire sur du papier ce que ton robot doit faire. (exemple : suivre la ligne)
mais que fait il quand il perd la ligne, ou quand il rencontre un obstacle.
Le mieux est decommencer par un robot qui suit la ligne et qui s'arrête quand il ne la voit plus.
Je te laisse réfléchir
Je n'aurais pas mieux répondu =)
Ensuite vu qu'il a 13 ans ... Son niveau scolaire est celui de 4ème 3 ème ... à partir de là je suppose que son niveau en électronique ou en programmation est faible ( pour ne pas dire nul. Mais il faut bien qu'on commence tous un jour moi aussi mon niveau était nul à cet age là
 /> )
/> ) Il va donc devoir choisir entre les deux méthodes sans les connaître et devoir tout apprendre à partir de 0 ...
Afin de choisir laquel des deux méthode je pense que cela va être simple : Cela sera en fonction de la complexité du mode de fonctionnement souhaité de l'évolutivité souhaité et du budget et de l'ordre dans d'importance dans lequel sont rangés les 3 critères à ses yeux !
Une fois que ces 4 éléments seront indiqué ont pourra avancer d'un pas =) ( cela n'empêche pas de renseigner au passage du matériel et de l'outillage disponible ^^ )
donc je dis à bientôt !
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#7
-
- Membres
- 21 messages
Nouveau membre
Posté 20 janvier 2013 - 10:51
(1) alors en matériel j'ai des roue de différente taille, des meccano, une petit ampoule, 4 moteur dont 2 identique, 3 câble a pince, une mini alarme, des ressort, des visse de differente taille, un LED jaune et je croie que c'est tout.
(2) comme le dit mike118 j'ai 13 ans je suis en 4 ème, et je m'y connais un peut en programmation (enfin je m'y connais bien en batch un peut en python et tres peut en c)
(3) je possède le nécessaire fer a souder, pompe a dessouder éteint, machine a bois Cie a chantourner, plein de tournevis, un pc portable asus a moi sous windows 7(enfin en matériel je ne manque pas)
(4)tout dépend si sa peut me servir a nouveau sinon pas plus 70 euro voir 50 euro.
j'avais déjà regarder pour les carte arduino genre la dfr arduino romeo pas besoin de soudage et programmable par l'ordi mais je pense que le moin cher c'est que le robot sois câbler (a vous de me le dire)
je penser que mon robot suive la ligne, quand il rencontre un obstacle il le détourne ou s’arrête et quand il perd la ligne il s’arrête.
(je croie ne rien avoir oublier)
Merci samuelfer
#8
-
- Membres
- 15 messages
Nouveau membre
- Gender:Male
- Location:Offekerque
- Interests:petitzavions
Posté 20 janvier 2013 - 05:44
Il te faut un système de mesure, c'est à dire deux cellules photoélectriques ou deux photo-transistors avec une diode Infra Rouge pour éclairer la cible. Ce qui implique dans les deux cas une ligne noir sur une surface claire (ou l'inverse).
Une unité centrale de traitement (carte arduino ou quelques portes logiques)
Des actionneurs c'est à dire un circuit qui commande les moteurs et les moteurs du robot.
Une mécanique, une plateforme avec deux moteurs reductés et une roue folle, un vieux char filoguidé ou un article comme ceux là :
http://www.hobbyking.com/hobbyking/store/__26274__Rover_5_Tracked_Robot_Chassis.html
http://www.hobbyking.com/hobbyking/store/__26250__4WD_Robot_Chassis_KIT_.html
ou mieux : http://www.hobbyking.com/hobbyking/store/__26270__Mr_General_My_First_Robot_Kit.html
Il faut ajouter environ 20 de port, les colis de faible valeur n'intéresse généralement pas la douane cela leur génère beaucoup de papier pour peu d'argent ! (1 $ environ 0.79 )
C'est le genre de truc qui se négocie avec un résultat scolaire impressionnant.
Demain je retourne mes caisses de bricoles et je photographie les plateformes que j'ai faites.
#10
-
- Membres
- 15 messages
Nouveau membre
- Gender:Male
- Location:Offekerque
- Interests:petitzavions
Posté 20 janvier 2013 - 08:15
Je ne comprend pas trop se que je dois acheter je n'est pas un grand budget.
C'est l'ensemble des solutions possibles, demain je te présente une solution.
J'ai trouvé ce lien en parcourant ce site : http://www.robot-maker.com/forum/tutorials/article/8-cocotix/


#13
-
- Membres
- 21 messages
Nouveau membre
Posté 21 janvier 2013 - 08:01
C'est l'ensemble des solutions possibles, demain je te présente une solution.
J'ai trouvé ce lien en parcourant ce site : http://www.robot-maker.com/forum/tutorials/article/8-cocotix/
Merci mais le cocotix je l'ai déjà fait merci quand même .
#15
-
- Administrateur
-
- 10â¯165 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 22 janvier 2013 - 12:44
Ensuite : choisir le cerveau de ton robot ( bas prix => CI logique et AOP , Réutilisable => Arduino , entre les deux => Pics )
Ensuite : choisir le type de ligne et définir le type de sol pour déterminer le capteur à utiliser.
Comme ton budget est faible il est préférable de faire un maximum de récupération ( surtout pour le châssis ) et réserver le budget pour ce que tu ne pourras pas récupérer ...
bonne continuation !
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#16
-
- Membres
- 15 messages
Nouveau membre
- Gender:Male
- Location:Offekerque
- Interests:petitzavions
Posté 22 janvier 2013 - 01:42
 [/img]
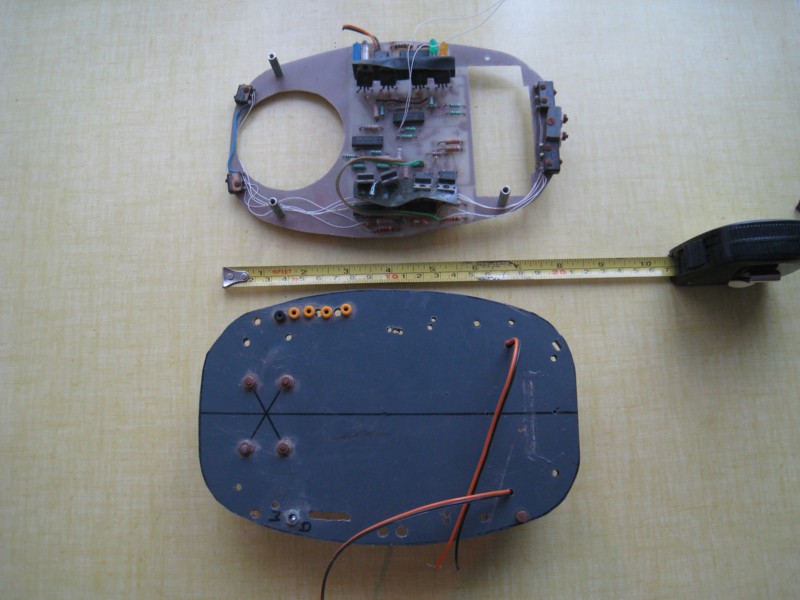
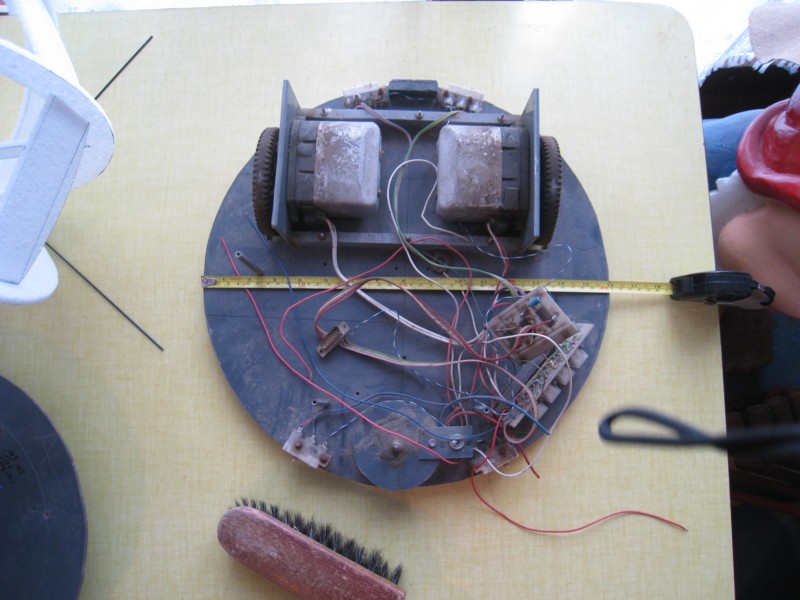
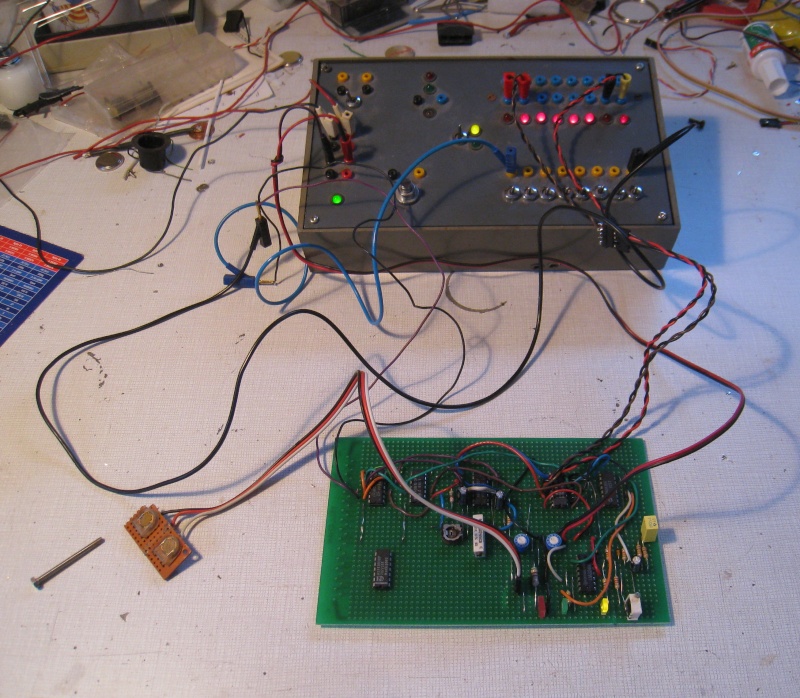
[/img]Voilà Ce que j'ai retrouvé dans les stocks
La taille une boite de Danette de 1 kg

J'ai fait un peu plus gros
Le cerveau des bidules une carte avec un microprocesseur Z80 2Kbits de memoire vive et 2 kbits de PROM en 8 bits.
8 entrées 8 sorties tout ou rien. pour les années 85, c'était dans l'air du temps.
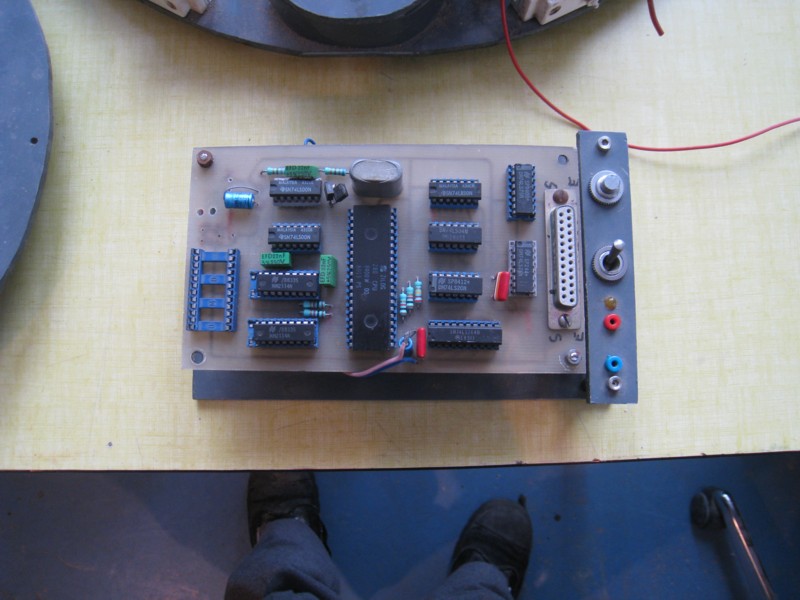
Ce matin j'ai acheté quelques Cmos (7 pièces + un LM 324 = 5.50 )
Cette après midi je cable et ce soir je mets les schémas qui fonctionnent
#17
-
- Membres
- 21 messages
Nouveau membre
Posté 22 janvier 2013 - 04:50
J'ai fait ma basse roulante en bois maintenant j'aimerai bien savoir ou trouver les cerveau réutilisable (arduino ou autre mais pas trop cher )Déjà pour commencer je te suggère de faire une base roulante ... ou du moins de choisir tous ce qui formera ta base roulante ( batterie et interface de puissance comprise )
Ensuite : choisir le cerveau de ton robot ( bas prix => CI logique et AOP , Réutilisable => Arduino , entre les deux => Pics )
Ensuite : choisir le type de ligne et définir le type de sol pour déterminer le capteur à utiliser.
Comme ton budget est faible il est préférable de faire un maximum de récupération ( surtout pour le châssis ) et réserver le budget pour ce que tu ne pourras pas récupérer ...
bonne continuation !
puis pour les ligne je voudrais qu'il suivent des ligne noir sur un font claire merci .
#18
-
- Membres
- 15 messages
Nouveau membre
- Gender:Male
- Location:Offekerque
- Interests:petitzavions
Posté 22 janvier 2013 - 07:14
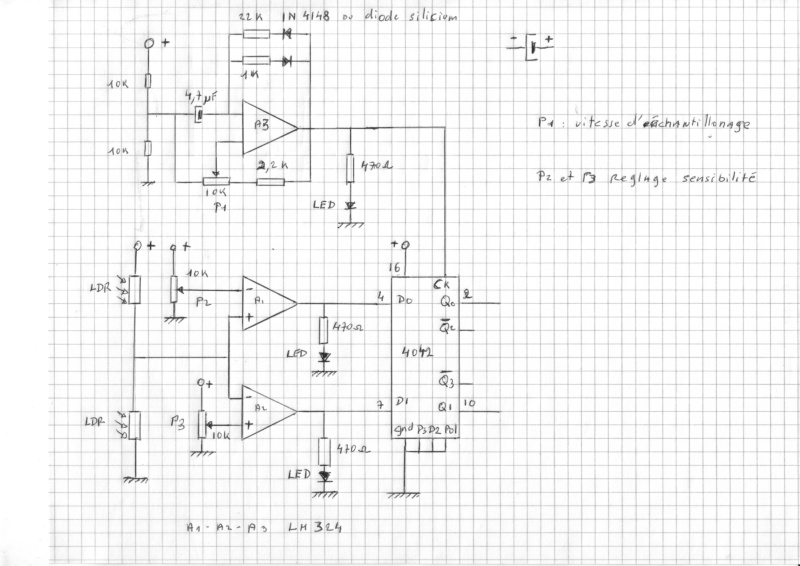
La réalisation pratique
J'ai un problème c'est que je câble en suivant mon idée donc il y a déjà monté une partie du traitement des impacts
Le réglage de la partie lumière. mettre les cellules sous une lampe, régler les potars P2 et P3 pour que les diodes soient éteintes.
attention : la dispersion des caractéristiques des LDR est telle que l'on peut avoir sur le point milieu du pont diviseur 1,5 Volt.
Passer un doigt devant une des cellules, la led s'allume, puis essayer l'autre. L'affinage se fait après sur la ligne
Le potar P1 sert à régler la vitesse d'échantillonnage, la led est allumée est s'éteint pendant un temps très court.
La bascule 4042 sert à mettre en mémoire l'ordre, cela rend le robot moins erratique.
les réglages sont a fignoler lors des essais.
Pour une utilisation avec un circuit telle que le L298 on utilise des quatre sorties de la bascule
Important les entrée D2 et D 3 doivent etre à la masse (o volt)
le circuit est alimenté en 6 Volts
- Mike118 aime ceci
#19
-

- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 22 janvier 2013 - 10:22
Achete chez roboshop, achette chez conrad, achete chez futurlec...
Bref, fait de la recup, ca coute toujours moin cher !
- Microrupteurman aime ceci
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




