
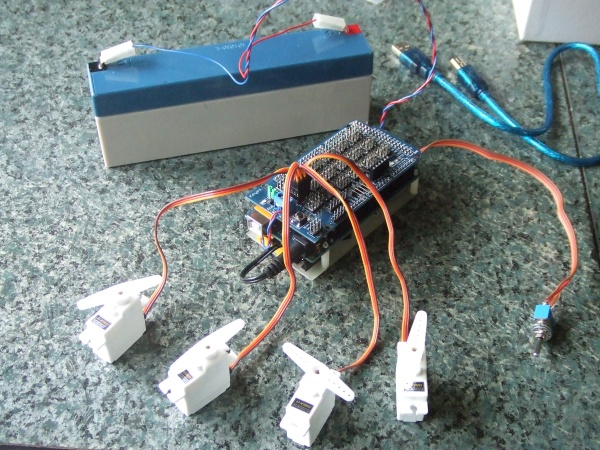
Dans ma présentation je vous parlais de mon projet, la création d'un bipède sur une base d'Arduino Mega, à moindre frais puisque je vais tenter une création de A à Z (le plus possible en tout cas), avec beaucoup de matériel de récupération !
Pour la plus grande partie, en fonction de la difficulté, je vais faire participer activement mes enfants, que ce soit pour la soudure, la découpe, l'assemblage, le codage, etc ...
Avant tout pour passer du temps avec eux
 mais aussi pour leur apprendre quelques trucs qu'ils ne verront jamais sur la PS3
mais aussi pour leur apprendre quelques trucs qu'ils ne verront jamais sur la PS3 
Ce projet va donc prendre pas mal de temps avant dêtre aboutit, mais je compte bien le terminer.
J'ouvre ce sujet qui se remplira au fur et à mesure de l'avancement des choses !
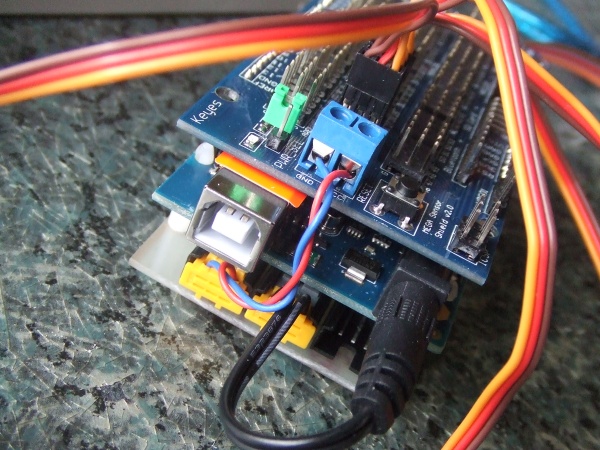
Alors voilà, j'ai acheté la carte méga, le shiel pour brancher directement les servos, et quelques servos pour commancer !
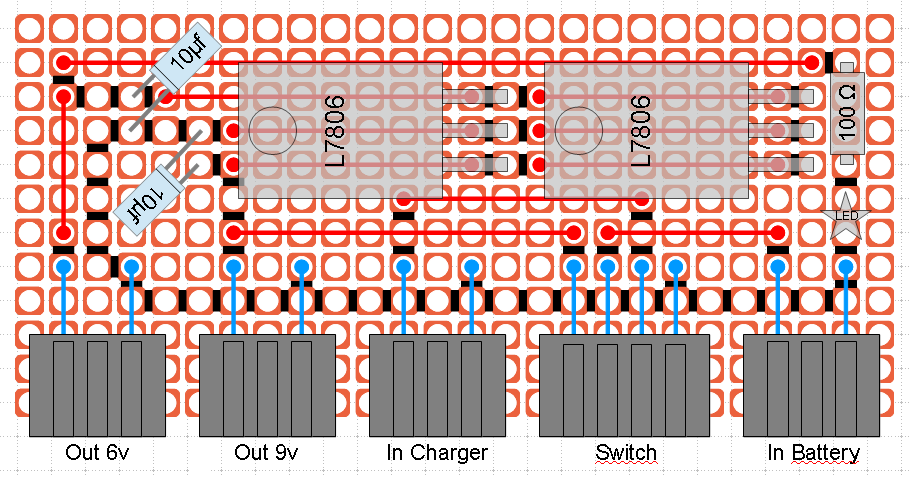
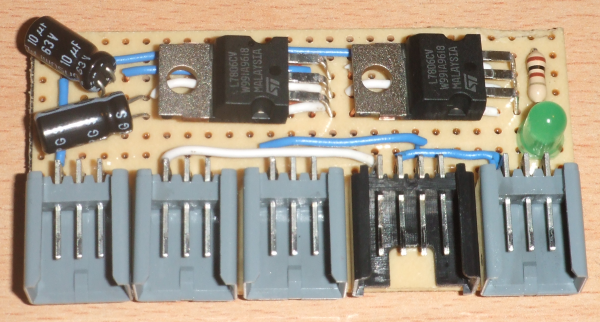
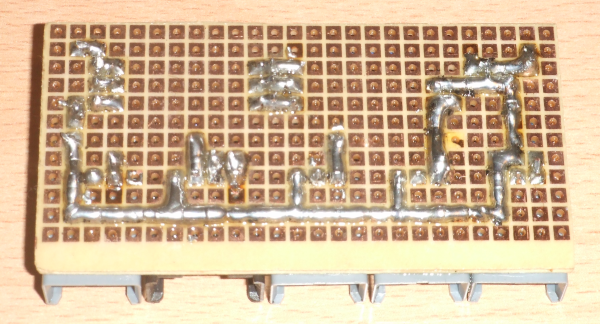
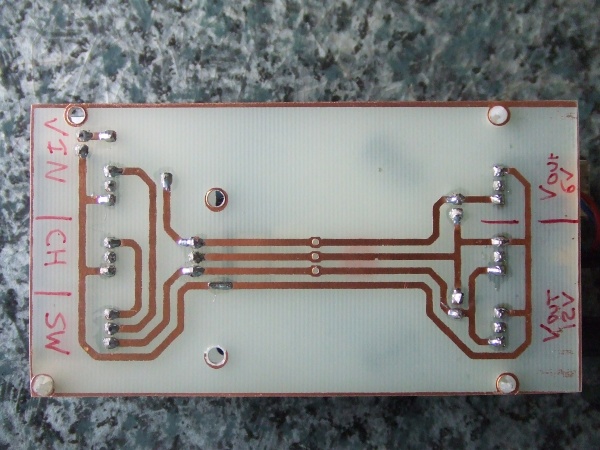
J'ai bricolé un CI pour le raccordement de tout le rèste (Energie, voyants, interrupteurs).
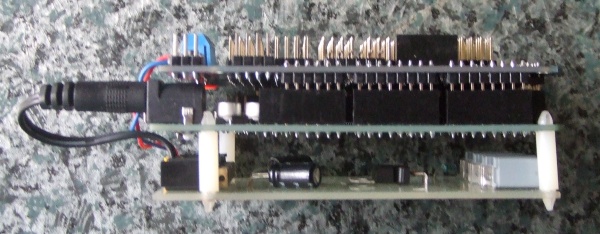
Les 3 cartes CI seront stackées pour un gain de place.
N'hésitez pas à me donner des conseils, je suis preneur de toutes informations !
Ce week-end je posterais des photos de ma carte régulateur (si mon fils ne s'est pas cramé avec le fer ^^).
Ainsi que quelques schémas d'explications !
@+



























{kind=link}