Ayant recemment trouver un superbe châssis a chenilles qui est donc non motoriser ( car issue d'un jouet chasse neige ).
J'aimerais beaucoup télécommander cette engin grâce a une télécommande 2,4 ghz ( que j'ai dejas ) mais je n'ai pas de contrôleurs de moteurs CC pour contrôler les moteurs de l'engin et je n'ai pas vraiment envie d'en acheter.
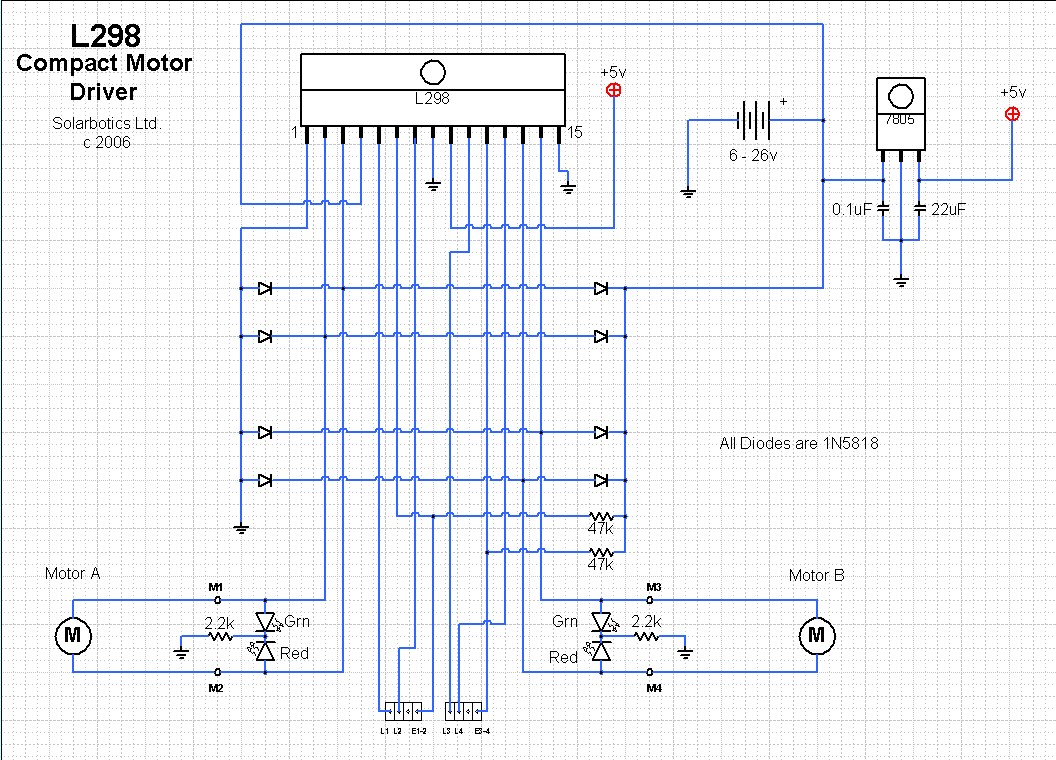
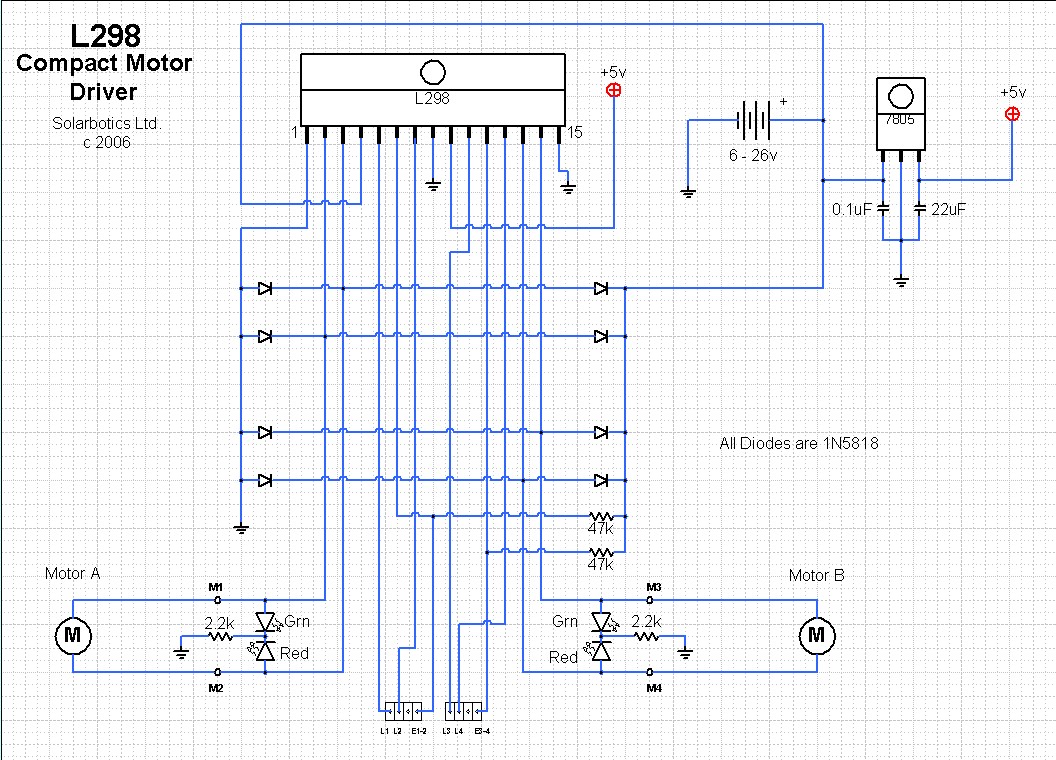
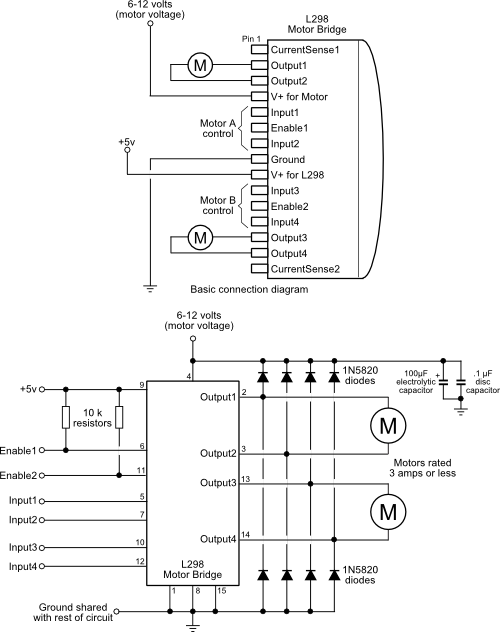
C'est pourquoi je me suis dit que je pouvais passer par une arduino et un L298N ( que j'ai en plus en quantité ) pour contrôler les moteurs ( qui seront, je pense, des moteurs 12V )
c'est donc la que le probleme se pose : Comment faire communiquer une arduino avec une télécommande ?
J'ai pensé a connecté la broche de signal de sortit des différentes voies du récepteur au entrée analogique ( ou numérique pour PWM ? ).
Je pourrais ainsi lire ces valeurs ( 0 a 1023 ? ) que je "maperais" entre 0 et 255 pour ensuite faire varier "enable Pin" sur mon L298N et donc la vitesse de mes moteurs.
Cette solution vous parait elle possible ? et si oui je vais avoir besoin d'un coup de pousse pour le code car j'ai encore du mal ^^
Dite moi si vous voulez des photos du chassis car il est vraiment cool
 />
/>