
Bonjour,
Un robot calligraphe utilise plusieurs moteurs superposés pour faire un dessin.
Le système me parait très original et m'étonne.
Mais, je ne comprends pas très bien comment il fonctionne.
D'habitude, il y a un moteur pour l'axe des x, et un autre moteur pour l'axe des y.
Peut-être que c'est le cas aussi ici.
L'avantage de cette superposition, c'est que ça prend peu de place.
Et surtout, il n'y a pas un lourd moteur, placé sur un coude, à déplacer.
Le bras reste léger.
Quelle seraient les formules mathématiques utilisées par ces moteurs superposés pour aller à un point x, y ?

10 réponses à ce sujet
#2

Mike118
-

- Administrateur
-

- 10â¯321 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 03 août 2013 - 03:48
Salut !
La personne la mieux placée sur le forum pour parler de ce genre de robot me semble bien être Leon ! ( Loué soit son nom pour reprendre un autre compère du forum ^^ ) .
Tu as en effet pu le constater toi même avec ce sujet.
Après pour les formules, ce ne sont que des mathématiques /> du coup je me permet quand même de répondre =)
/> du coup je me permet quand même de répondre =)
Tout d'abord il faut bien avoir en tête un schémas géométrique équivalent qui sert de base aux calculs !
exemple :
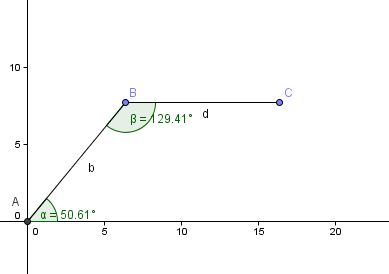
Ici le point A est l'origine, on peut l'assimiler à l'épaule, B au coude et C est le point dont on veut contrôler la position.
On note b la distance AB, alpha l'angle que fait le segment AB avec l'axe des x
On note d la distance CD, beta l'angle que fait le segment AB avec le segment CD.
Maintenant il suffit de ressortir les cours de trigonométrie !
Il y a en effet plusieurs façon d'obtenir le résultat concernant le position de C.
L'une des méthode et de calculer la position XB en x et YB en y du point B grâce à l'angle alpha et à la longueur b.
Puis d'ajouter un dx et un dy calculés à partir de la position du point B en connaissant alpha, beta et d.
Une autre méthode, considéré directement le segment AC de longueur fonction de b d alpha et beta, faisant un angle gama avec l'axe des abscisse calculable en connaissant la longueur du segment AC , b d et l'angle alpha.
Bon je te laisse faire les calculs/> en te suggérant de commencé par la première méthode, un peu plus simple selon moi.
Une fois que tu as les équation liant XC et YC à alpha et béta ( en fonction des constantes b et d ) tu peux faire une cinématique inverse pour avoir les valeur de alpha et béta pour Xc et Yc souhaité ( toujours en fonction de b et d ) .
Par contre attention, pour un même point souvent plusieurs configurations son possible avec cette architecture/> Tu le retrouvera dans les équations =)
Bien entendu géométriquement parlant la position que peut prendre le point C est limité dans un disque de rayon b+d.
En pratique, des contraintes mécaniques font qu'en général le point C ne peut atteindre qu'une partie de ce disque et rarement sa totalité.
à bientôt !
La personne la mieux placée sur le forum pour parler de ce genre de robot me semble bien être Leon ! ( Loué soit son nom pour reprendre un autre compère du forum ^^ ) .
Tu as en effet pu le constater toi même avec ce sujet.
Après pour les formules, ce ne sont que des mathématiques
/> du coup je me permet quand même de répondre =)Tout d'abord il faut bien avoir en tête un schémas géométrique équivalent qui sert de base aux calculs !
exemple :
Ici le point A est l'origine, on peut l'assimiler à l'épaule, B au coude et C est le point dont on veut contrôler la position.
On note b la distance AB, alpha l'angle que fait le segment AB avec l'axe des x
On note d la distance CD, beta l'angle que fait le segment AB avec le segment CD.
Maintenant il suffit de ressortir les cours de trigonométrie !
Il y a en effet plusieurs façon d'obtenir le résultat concernant le position de C.
L'une des méthode et de calculer la position XB en x et YB en y du point B grâce à l'angle alpha et à la longueur b.
Puis d'ajouter un dx et un dy calculés à partir de la position du point B en connaissant alpha, beta et d.
Une autre méthode, considéré directement le segment AC de longueur fonction de b d alpha et beta, faisant un angle gama avec l'axe des abscisse calculable en connaissant la longueur du segment AC , b d et l'angle alpha.
Bon je te laisse faire les calculs
/> en te suggérant de commencé par la première méthode, un peu plus simple selon moi. Une fois que tu as les équation liant XC et YC à alpha et béta ( en fonction des constantes b et d ) tu peux faire une cinématique inverse pour avoir les valeur de alpha et béta pour Xc et Yc souhaité ( toujours en fonction de b et d ) .
Par contre attention, pour un même point souvent plusieurs configurations son possible avec cette architecture
/> Tu le retrouvera dans les équations =)Bien entendu géométriquement parlant la position que peut prendre le point C est limité dans un disque de rayon b+d.
En pratique, des contraintes mécaniques font qu'en général le point C ne peut atteindre qu'une partie de ce disque et rarement sa totalité.
à bientôt !
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#3
ChristianR
-

- Membres
-
- 474 messages
Habitué
- Gender:Male
- Location:Isère (38)
- Interests:Arduino, programmation, électronique...
Posté 03 août 2013 - 05:39
Dans la vidéo, l'opérateur montre au robot les déplacements à faire en tenant un "pinceau" dans la main.
Le robot enregistre et reproduit le mouvement exact, il n'a sans doute pas besoin de faire de calculs de trajectoires.
Le robot enregistre et reproduit le mouvement exact, il n'a sans doute pas besoin de faire de calculs de trajectoires.
Christian
#4
olivthill
-
- Membres
-
- 143 messages
Membre occasionnel
- Gender:Male
- Location:Normandie
- Interests:Robots humanoides.
Posté 05 août 2013 - 11:25
@ ChristianR. Oui, le robot de la vidéo n'a pas besoin de formules, mais il me les faudra un jour, parce que je voudrais reprendre le système sans la partie apprentissage.
Mais de toutes manières, ce n'est pas urgent, parce que je suis occupé sur un autre projet en ce moment.
@ mike118. Merci beaucoup pour cette réponse détaillée. C'est très sympathique d'avoir pris le temps de donner autant de précisions.
Je ferai des tests quand j'aurai du temps. Alors, je verrai peut-être que ce serait équivalent à un modèle avec un coude et je n'aurai plus de doute.
En tous cas, merci.
Mais de toutes manières, ce n'est pas urgent, parce que je suis occupé sur un autre projet en ce moment.
@ mike118. Merci beaucoup pour cette réponse détaillée. C'est très sympathique d'avoir pris le temps de donner autant de précisions.
Mon problème principal, c'est que je suis pas convaincu que ce soit équivalent à ce schéma. Il n'y a pas de coude, et c'est ça qui me trouble....
Tout d'abord il faut bien avoir en tête un schéma géométrique équivalent qui sert de base aux calculs !
exemple :
...
Je ferai des tests quand j'aurai du temps. Alors, je verrai peut-être que ce serait équivalent à un modèle avec un coude et je n'aurai plus de doute.
En tous cas, merci.
#6
Mike118
-
- Administrateur
-
- 10â¯321 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 05 août 2013 - 03:24
Mon problème principal, c'est que je suis pas convaincu que ce soit équivalent à ce schéma. Il n'y a pas de coude, et c'est ça qui me trouble.
Je ferai des tests quand j'aurai du temps. Alors, je verrai peut-être que ce serait équivalent à un modèle avec un coude et je n'aurai plus de doute.
En tous cas, merci.
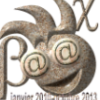
En effet! Je viens de revoir la vidéo. Il y avait des détails qui m'ont échappé ! J'ai répondu trop vite ^^ Il faut dire aussi qu'on ne voit pas bien le système qu'ils ont mis en place !
Bref je ne suis pas sur de la structure réellement mis en place ni la position des moteurs... Car je n'avais pas remarquer l'espèce de parralélogramme déformable.
Il est possible que le modèle soit bien équivalent au modèle précendent proposé avec des moteurs au même endroit mais que pour augmenter la rigidité de la structure on ait ajouté un deuxième bras hyperstatique et pas nécéssairement motorisé. Un peu comme si tu te tenais le point de ta première main avec ta deuxième main et que tu guide ton mouvement uniquement avec ta première main...
En gardant le schémas proposé précédent( deux bras "2D" aux mains liés, ) il est possible que la motorisation se fasse uniquement au niveau des coudes des deux bras.
Dans ce cas là on joue sur la forme du "parallélogramme" déformable pour se placer dans l'espace... Dans ce cas là aussi ce n'est que de la géométrie.
Par contre le deuxième angle à contrôler n'est plus le même donc l'équation change un peu !
Ces deux possibilité se font en partant de l'hypothèses que les longueur des bras sont fixe... C'est plus compliqué si elles ne le sont pas !
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#7
BET@.M@X
-
- Membres
-
- 297 messages
Troll Archiviste
- Gender:Male
- Location:FRANCE
- Interests:La robotique et la méchanceté gratuite... mais il faut savoir tourner la page .
Posté 05 août 2013 - 08:14
Dessine nous un petit schéma de l'articulation si tu veux qu'on regarde quelles seront les formules à utiliser.
Hein ?
Quelqu'un a demandé un schéma ?
Laissez moi passer!!

Mon problème principal, c'est que je suis pas convaincu que ce soit équivalent à ce schéma.
Il n'y a pas de coude, et c'est ça qui me trouble.
Apparemment, ton trouble est plutôt dû à la présence d'un mystérieux second coude ...
 il lui faut pas grand chose pour l'effrayer
il lui faut pas grand chose pour l'effrayer Dans ce cas là on joue sur la forme du "parallélogramme" déformable pour se placer dans l'espace... Dans ce cas là aussi ce n'est que de la géométrie.
Par contre le deuxième angle à contrôler n'est plus le même donc l'équation change un peu !
Hum ... à mon humble avis, ton premier schéma reste valable :
Schéma honteusement pompé sur celui de mike118 ...
D'après la vidéo, on peut considérer que le montage est équivalent à un bras unique où le moteur du haut contrôle l'angle du bras (AB) par rapport à l'épaule et où le moteur du bas contrôle l'angle de l'avant bras (BC) par rapport au bras...
 sachant que le poignet est solidaire de BC
sachant que le poignet est solidaire de BCL'avantage évident de cette solution, c'est que les coudes n'ont pas une lourde motorisation a supporter ... ce ne sont que des articulations libres.
Je trouve cela très élégant ...
l'avis de LEON serait le bienvenuCela me rappelle la mécanique d'un pantographe, mais avec un rapport 1:1
Merci wikipedia ...
Image(s) jointe(s)

"L'intelligence artificielle servira de prothèse à la bêtise humaine !!"
"l'être humain est une machine irrationnelle occasionnellement logique ..."

#9
Mike118
-
- Administrateur
-
- 10â¯321 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 06 août 2013 - 05:24
BET@.M@X tu m'impressionneras toujours par la qualité de post ! Tu resteras toujours un maître en la matière pour moi
Tu resteras toujours un maître en la matière pour moi 
Le jour où je chercherais un responsable de communication c'est avec plaisir que je t'embauche ! x)
Mais bon dès ma première réponse sur cette discussion mon petit doigts m'a dit que tu ferais un tour par ici ( je ne vois pas du tout ce que j'avais écrit qui présageait cela !
( je ne vois pas du tout ce que j'avais écrit qui présageait cela !  )
)
Ensuite tu confirmes donc qu'il y a selon toi deux moteurs uniquement au niveau des épaules =) moi aussi ça me parait évident maintenant =)
Par contre du coup les équations sont un peut différents car il faut gérer d'une part l'angle que fait le segment AB avec l'axe des abscisse : donc alpha et d'autre part l'angle que fait le segment AD avec ce même axe du repère. =) Sachant que ce deuxième angle est fonction de alpha et Beta.
Mais bon ce n'est que de la géométrie élémentaire et cela se retrouve assez facilement ! =)
Peut être verra t on une version 3 du robot scribe de léon avec cette configuration ! ( ou pas ^^ x) )
Ensuite concernat le logiciel que j'avais utilisé pour le schémas : c'est géogébra. Un utilitaire très pratique pour résoudre et schématiser des problèmes de géométrie 2D tel que celui là !
Tu resteras toujours un maître en la matière pour moi Le jour où je chercherais un responsable de communication c'est avec plaisir que je t'embauche ! x)
Mais bon dès ma première réponse sur cette discussion mon petit doigts m'a dit que tu ferais un tour par ici
( je ne vois pas du tout ce que j'avais écrit qui présageait cela ! ) Ensuite tu confirmes donc qu'il y a selon toi deux moteurs uniquement au niveau des épaules =) moi aussi ça me parait évident maintenant =)
Par contre du coup les équations sont un peut différents car il faut gérer d'une part l'angle que fait le segment AB avec l'axe des abscisse : donc alpha et d'autre part l'angle que fait le segment AD avec ce même axe du repère. =) Sachant que ce deuxième angle est fonction de alpha et Beta.
Mais bon ce n'est que de la géométrie élémentaire et cela se retrouve assez facilement ! =)
Peut être verra t on une version 3 du robot scribe de léon avec cette configuration ! ( ou pas ^^ x) )
Ensuite concernat le logiciel que j'avais utilisé pour le schémas : c'est géogébra. Un utilitaire très pratique pour résoudre et schématiser des problèmes de géométrie 2D tel que celui là !
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#10
BET@.M@X
-
- Membres
-
- 297 messages
Troll Archiviste
- Gender:Male
- Location:FRANCE
- Interests:La robotique et la méchanceté gratuite... mais il faut savoir tourner la page .
Posté 06 août 2013 - 11:02
Ah, voilà. Maintenant, c'est clair. Je comprends. Merci.
Mais de rien ... c'est mike118 qui a fait tout le boulot théorique barbant

Le jour où je chercherais un responsable de communication c'est avec plaisir que je t'embauche...
Dans communication, il y a cation ...
 zut, ça fait rire que les chimistes spécialisés dans l'électrolyse industrielle,et encore...
zut, ça fait rire que les chimistes spécialisés dans l'électrolyse industrielle,et encore...Mais bon dès ma première réponse sur cette discussion mon petit doigts m'a dit que tu ferais un tour par ici
( je ne vois pas du tout ce que j'avais écrit qui présageait cela ! )
Tu as bien pensé mike118, car comme chacun ici le sait, je vénère LEON et ses miracles robotiques ... cette solution alternative à son dilemme du scribe ne pouvait qu'attirer mon attention.
Pourtant, ce sont de sacrés bestiaux ... pas facile de les louper !Ensuite tu confirmes donc qu'il y a selon toi deux moteurs uniquement au niveau des épaules =) moi aussi ça me parait évident maintenant =)
Par contre du coup les équations sont un peut différents car il faut gérer d'une part l'angle que fait le segment AB avec l'axe des abscisse : donc alpha et d'autre part l'angle que fait le segment AD avec ce même axe du repère. =) Sachant que ce deuxième angle est fonction de alpha et Beta.
Quoi ?
Un prétexte pour d'autres schémas ...
dégagez moi le passage !!!Comme à mon habitude, je reprendrai ton travail original en simplifiant volontairement les données du problème afin ... de ne pas me fatiguer
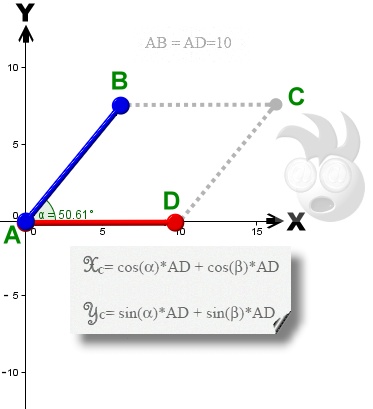
Donc, je décrète que :
- La longueur de AB est égale à celle de AD
- La longueur de BC est égale à celle de DC
- Et tant qu'on y est, AB=BC=AD=DC=10
- L'angle formé par AB et l'axe des x est alpha
- L'angle formé par AD et l'axe des x est beta
Bon, à partir de là ,grâce à des formules de trigonométrie sorties d'un livre de classe du 19e siècle et quelques bouts de papiers, j'affirmerai avec prudence que les coordonnées du point C sont :

Le bras AD est à l'horizontale, donc beta est nul ...
Le bras AD est parallèle à l'axe des X, donc beta est nul ...c'est moins équivoque
Voila un résultat qui semble correspondre au premier schéma ....
Faisons un autre essai en modifiant l'angle beta (-45°) pour voir :
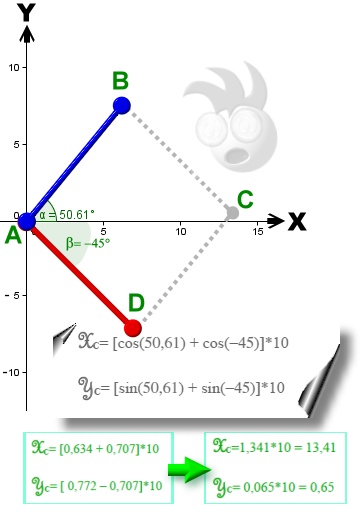
Apparemment, ça tombe pas trop loin ...
Mais il faut dire que j'utilise le logiciel BET@M@TH, et il a une tolérance de 10% sur les courbes et les vecteurs ...plus quand il pleut
Le truc marrant, c'est que la formule marche aussi avec un bras unique à condition que l'angle beta soit celui de l'avant bras BC par rapport à l'axe des x ... ... Puissent EUCLIDE et LEON me pardonner toutes mes offenses .
... Puissent EUCLIDE et LEON me pardonner toutes mes offenses .
 ...
...
La vache, j'ai atteint la limitation en nombre d'images...je peux plus ajouter de smileys :-(
Image(s) jointe(s)



- Mike118 aime ceci
"L'intelligence artificielle servira de prothèse à la bêtise humaine !!"
"l'être humain est une machine irrationnelle occasionnellement logique ..."


Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




