déballage by TitiMoby, on Flickr

déballage by TitiMoby, on Flickr
Comme je le disais dans ma présentation, la valise à idées est :
- assembler correctement la base
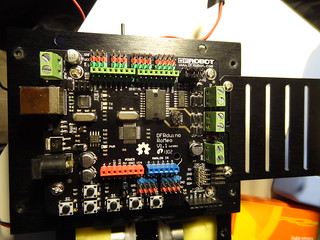
- la tester un minimum en lui faisant faire des figures simples programmées sur la Romeo
- lui ajouter le capteur IR Sharp et commencer de la détection d'obstacles
- monter le capteur sur un servo, voire un pan tilt
- ajouter à l'ensemble une interaction avec un device Android (usb ou BT, là on s'éloigne dans le temps
 )
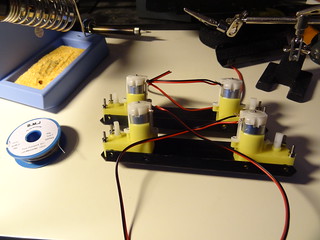
)La base est un DFRobot 4WD.
J'ai eu la bonne surprise de constater que par rapport aux différentes vidéos ou articles parus sur ce robot, une doc papier minimale était maintenant livrée.
Le site du constructeur a même quelques photos.
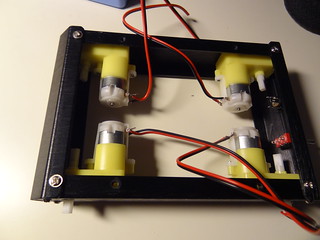
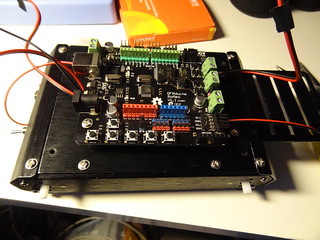
Pour le câblage et les petits soucis que l'on peut rencontrer, je ne peux que conseiller l'excellent article sur RugCommunity.
La question qui me trotte dans la tête en tâche de fond, c'est la question de l'alimentation.
La plupart des robots de ce type ont apparemment une alim pour l'Arduino et une pour les moteurs.
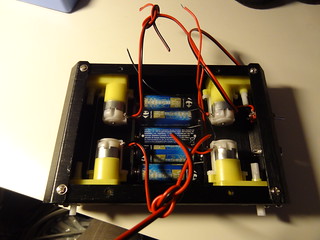
Dans ce montage, je part sur un seul bloc de 4 piles AA.
De plus, comme j'ai bien l'intention de beaucoup expérimenter, je vais rapidement avoir besoin d'une alim qui se recharge.
Du coup, ce sont en fait 3 questions :
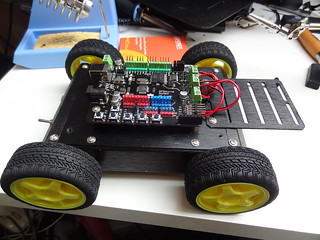
- 4 piles AA de la base suffiront à alimenter la carte Romeo et les 4 moteurs ?
- peut on remplacer par une seule batterie Lipo ou autre ? ou doit on en positionner 2 ?
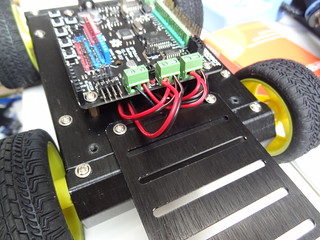
- le chassis possède une prise femelle de type alim, il doit donc être possible de recharger (soit la batterie, soit des AA rechargeables) mais dans ce cas, que doit on prévoir pour passer de ON/OFF/recharge ?
Voilà, le montage à déjà démarré, mais il était déjà assez tard

Je prnedrai des photos régulièrement et les publieraient sur mon Flickr.