Maintenant je trouve que leur système 2 "bémols": il est très chère; pour 3 servo je dit pas mais dés que l'on en veux une vingtaine... Et il n'y à pas d'appuie en bas du servo pour laisser passer la vis, du coup le servo est uniquement supporté pas les ailettes.
C'est de la tôle alu 2mm, donc c'est très costaud. Et puis un servo est conçu pour n'être fixé que par ses 'ailettes'. Tu peux faire quelque chose avec moins de matière.
Sinon, tu peux acheter des articulations chez Easy Robotics. Nicolas, qui tient la boutique, est très sympa et à l'écoute des clients.
Le système avec le roulement aurait pu être bien s'il restait faisable pour un amateur !
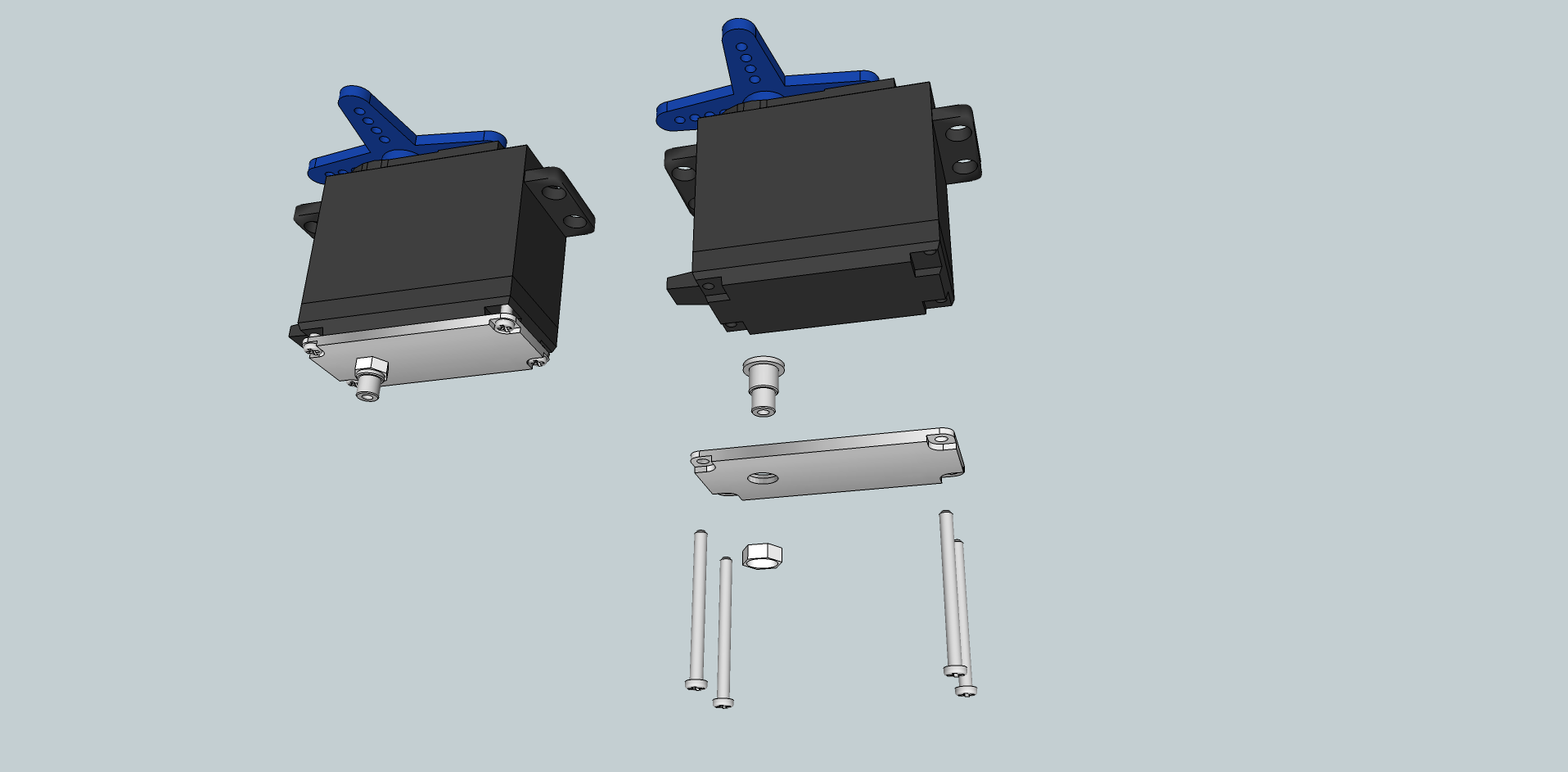
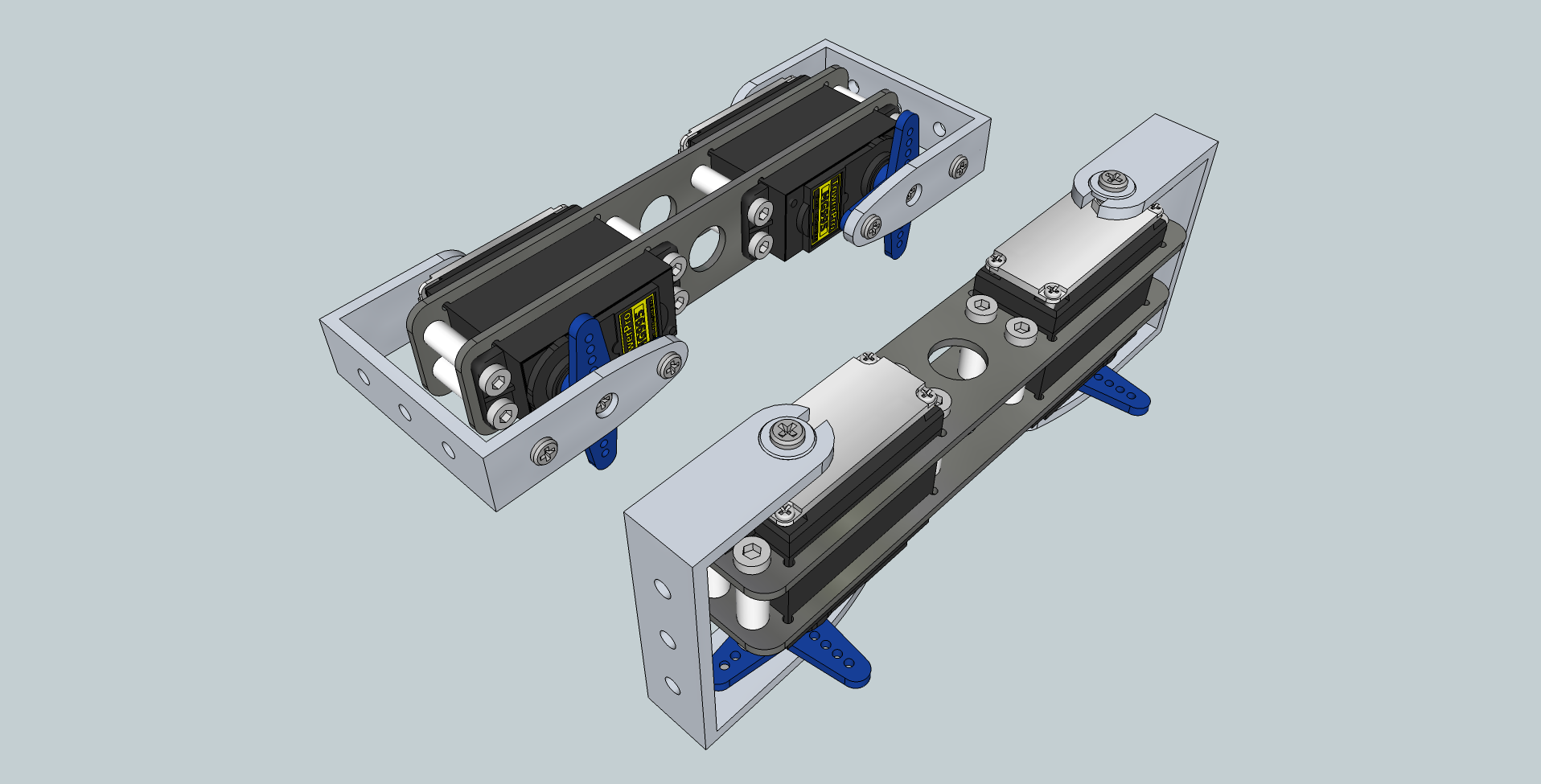
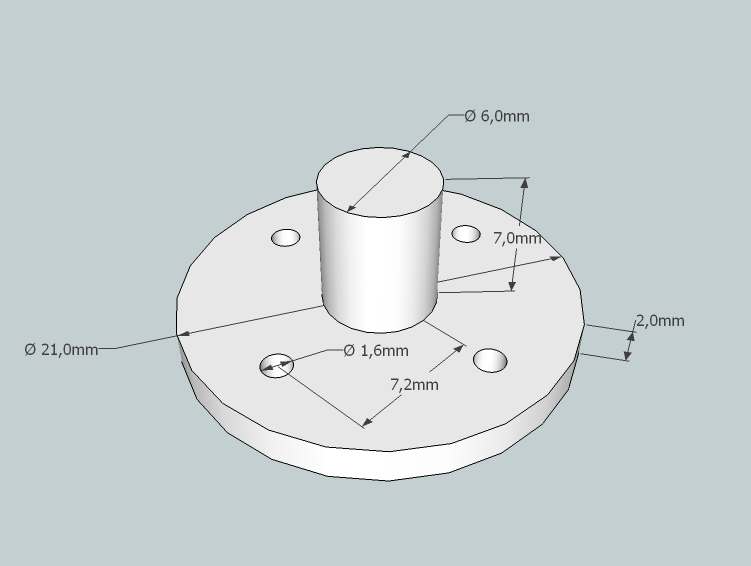
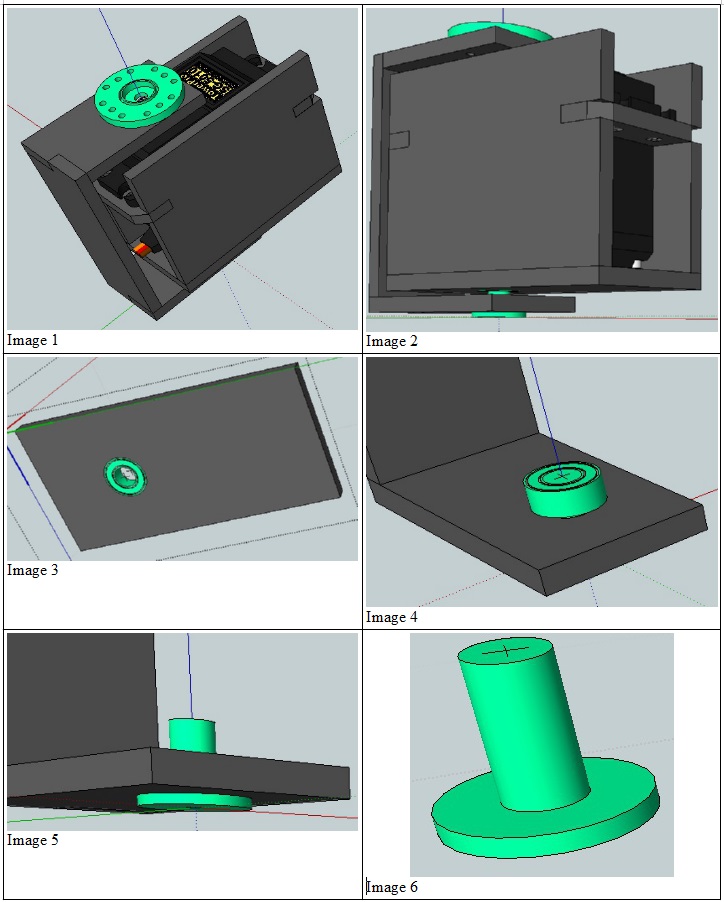
Je ne comprend pas ton "faisable pour un amateur". C'est exactement ça que j'ai utilisé pour les articulations de mon robot, avec des pièces bricolées par moi même, sans pour autant un outillage énorme (perceuse sur support, pointeau, lime, scie à métaux). Donc c'est parfaitement faisable pour un amateur! Il suffit de percer les 2 pièces de l'articulation à un diamètre de 3mm d'un côté et de 8mm de l'autre.
Il suffit d'acheter ce type de roulement (5€ les 2). On peut trouver des roulements légèrement différents dans les bons magasins de bricolage, mais ça n'est pas facile à trouver.
http://www.electronique-diffusion.fr/product_info.php?products_id=60206

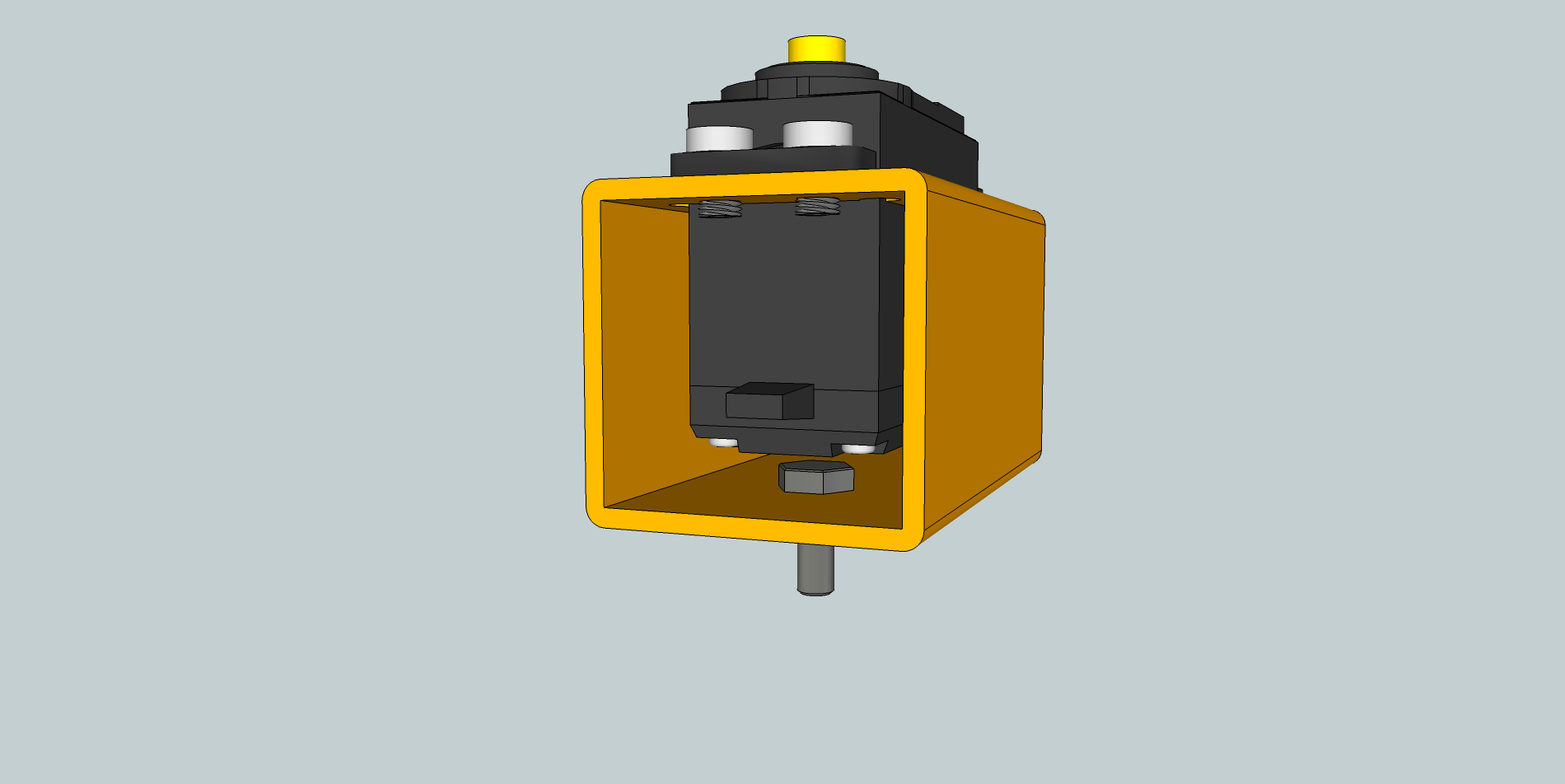
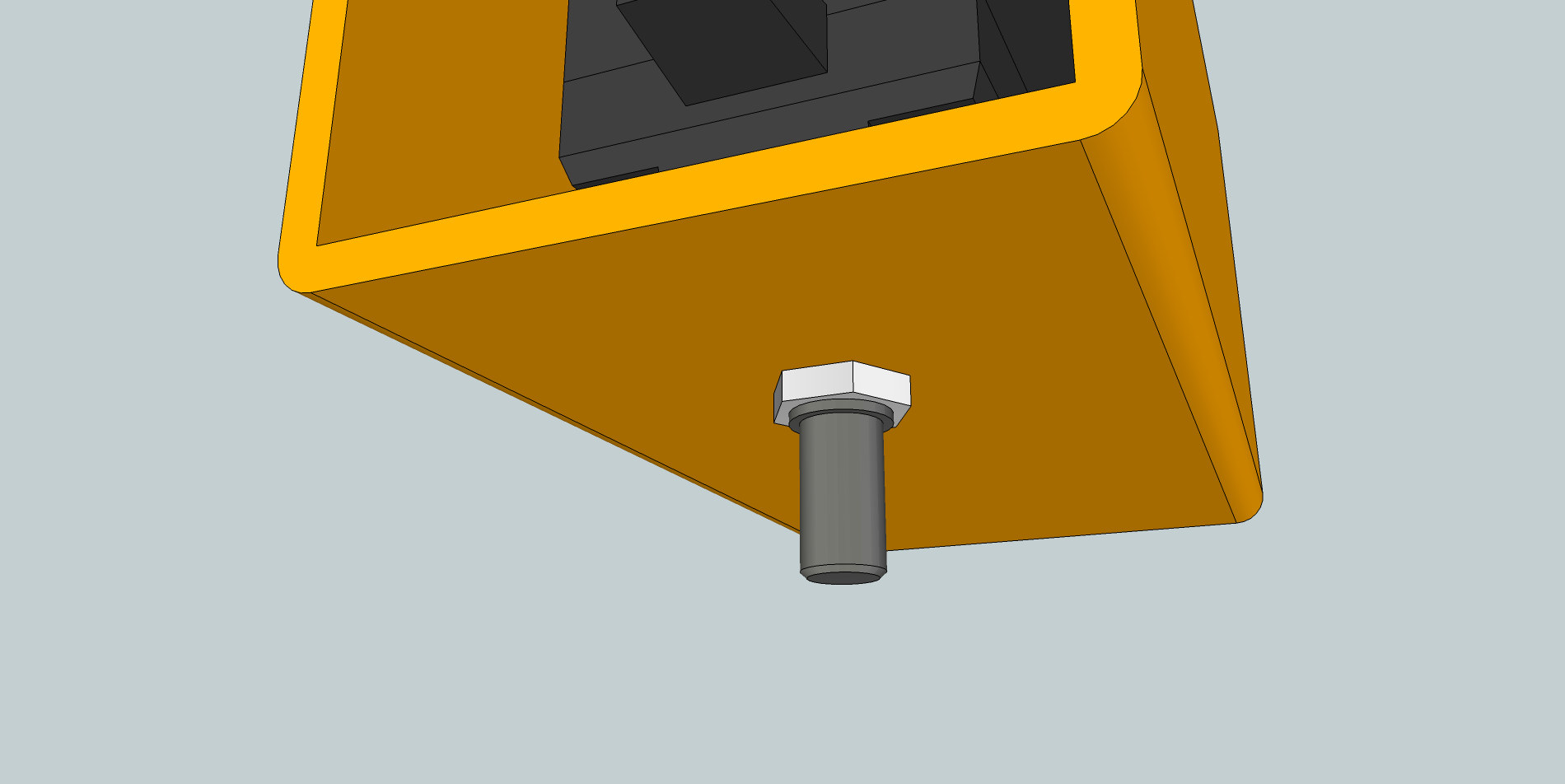
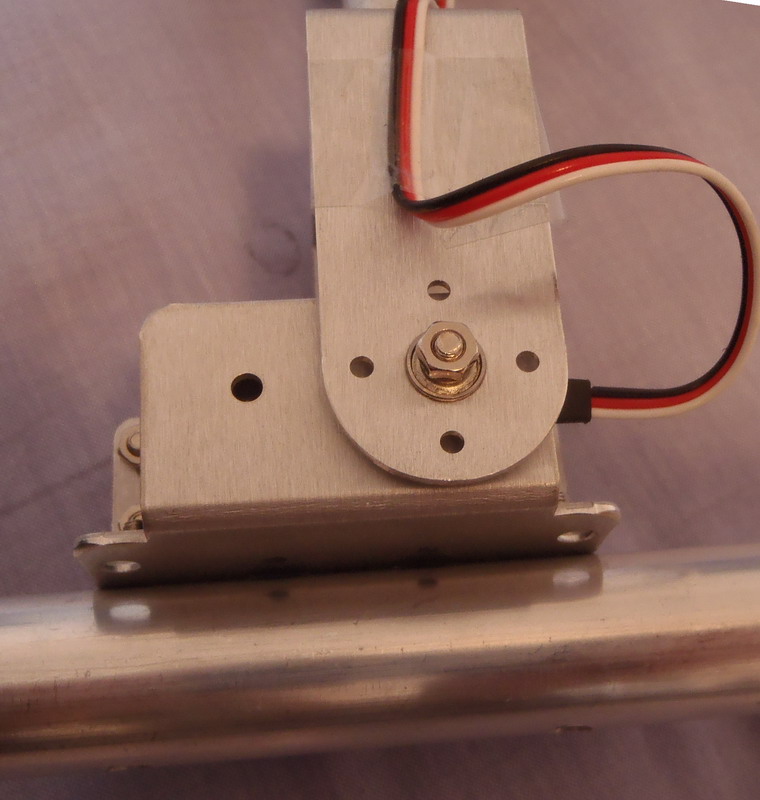
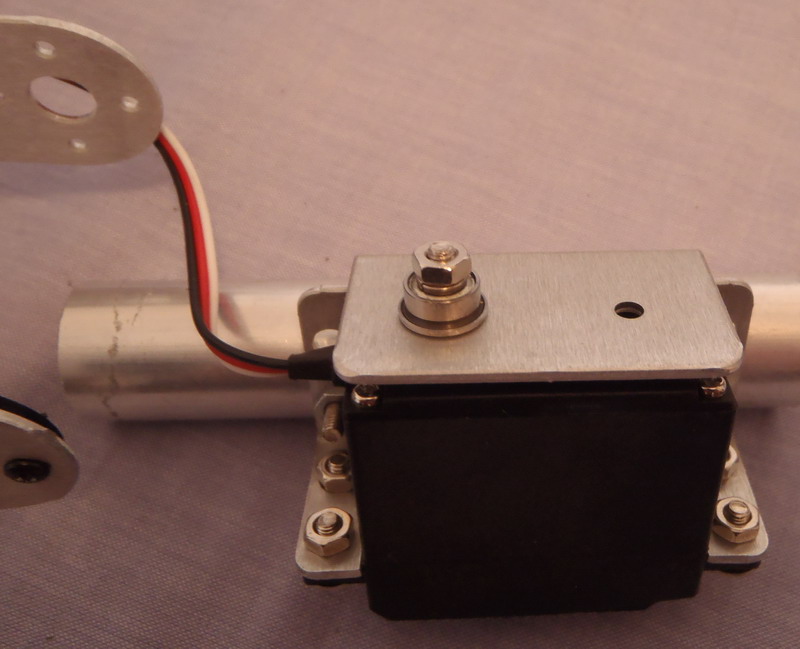
De plus le système reste bancale niveau mécanique. Le roulement est vissé par du M3 sur le châssis, mais y a t-il une entretoise entre les deux histoire que la bague extérieure ne touche pas le châssis ?
Si ça frotte (ça m'est arrivé sur plusieurs articulations), il suffit de mettre une rondelle étroite entre le chassis et le roulement. Cette rondelle ne rajoute aucun jeu, aucune flexibilité.
De plus quand on insert l'articulation sur le roulement, on est obligé alors de plier le U pour que ça passe dans le roulement, mais qu'est ce qui évite au U de s'extraire du roulement, aucune contraintes ne semblent être présente ?
C'est justement la "contrainte" de la déformation élastique du U qui maintient plaqué. C'est très simple, ça fonctionne, c'est pragmatique.
A dire vrai faire un second axe à un servo relève d'un travail de précision pour avoir les axes coïncidant ! C'est d'ailleurs un des problème qui a précipité mon arrêt pour la robotique, pas d'outil de précision, pas de méca valable, que du bricolage !
Là, je ne te comprend pas... Pour percer au bon endroit, avec une très grande précision, sur une tôle fine, il n'y a aucun besoin d'outil cher! Il suffit d'un pointeau, et c'est tout! En plus de la perceuse bien sur...
Pour une tôle plus épaisse, en plus du pointeau, il faut un support de perçage (colonne) pour percer droit, et on en trouve des support de perçage très abordables (tu t'en es acheté toi même). Il y a aussi une astuce pour ceux qui ne veulent pas investir dans un support de perçage : un miroir (feuille réfléchissante, CD) scotchée à la tôle permet de voir si le forêt est bien droit ou non.
Pour percer des trous large avec une bonne précision, il suffit de percer en plusieurs passes avec des forêts de diamètre de plus en plus gros : 3 passes pour du 8mm, ça donne un résultat très précis.
Bref le tout c'est de faire par toi même sans à avoir à acheter de pièce chez robotshop ou lynxmotion qui se goinfre sur le dos des petits amateurs qui n'ont pas envie de se salir les mains.
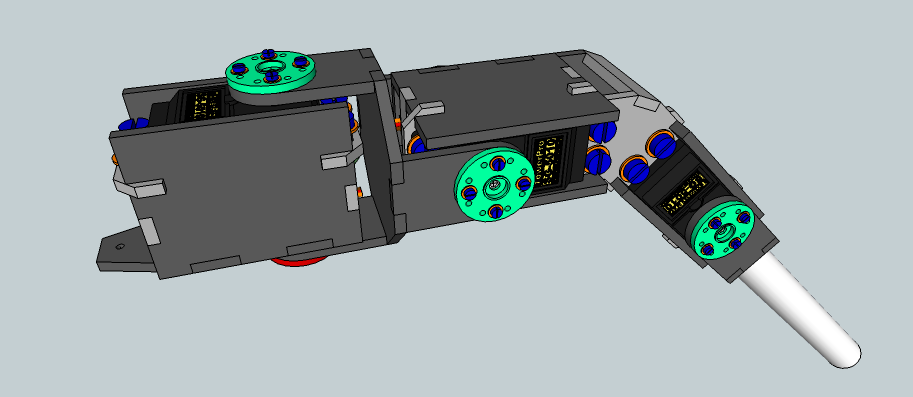
Regarde mon robot : j'ai fabriqué beaucoup de pièces moi même, avec du matériel acheté en grande surface de bricolage : tôle aluminium, profilé alu rond de différents diamètres, des tiges filetées.
Ce robot ne m'a pas couté grand chose pour la qualité du truc (sans me vanter). C'est surtout les poulies qui ont couté cher sur ce robot. Et je n'ai pas cherché à faire un robot "économique", il est certainement possible de faire beaucoup mieux.
On ne va pas relancer les vieux débats, mais j'ai toujours l'impression que tu cherches des prétextes pour ne pas insister sur les réalisations concrètes. C'est un choix, ça ne me pose pas de problème, mais il ne faut pas décourager les autres à passer à l'action.
Leon.


 />
/>