Bonjour,
je crois qu'il faut que tu alimentes ta pro mini en 5 Volts (4 piles ou 4 accus) car les servos fonctionnent en 5 volts (4,8V à 6 V)
sur la pro mini il y a un régulateur qui te permet de l'alimenter entre 3,3v et 12V (regardes les caractéristiques de ta carte pro mini car sur certaines le régulateur à été zappé par économie)
si le régulateur n'est pas intégré, il faut alimenter ta carte et ton servo en 4,8V (par exemple) et réguler ta carte en 3,3V
de toute façon pour la consommation c'est le servo qui consomme le plus surtout s'il intervient souvent (le futaba s3003 consomme 450 mA en volts à son couple max qui de 3,2Kg)
pour le branchement en 5 volts regardes ce lien:
interfacer un servomoteurà ma connaissance les signaux de commande envoyés par ta carte pro mini seront les mêmes que ton alim donc 3,3 Volts
pour que ton servo fonctionne correctement il te faudra certainement faire une interface avec deux transistors 1 NPN suivis de 1 PNP (car les signaux de commande seront inversé par le NPN
et rétablis par le PNP) tu peux aussi utiliser un 74LVC125 qui simplifie l'interfaçage, car une seule porte suffit ce CI est très pratique pour ce genre d'interfaçage car tu peut gagner en intensité
en mettant tes portes en parallèle
mais plus simple est d'acheter les nouvelles cartes pro mini qui fonctionnent en 5 volts.
Bonjour,
Je pose la question au cas ou certains auraient dejà la reponse...
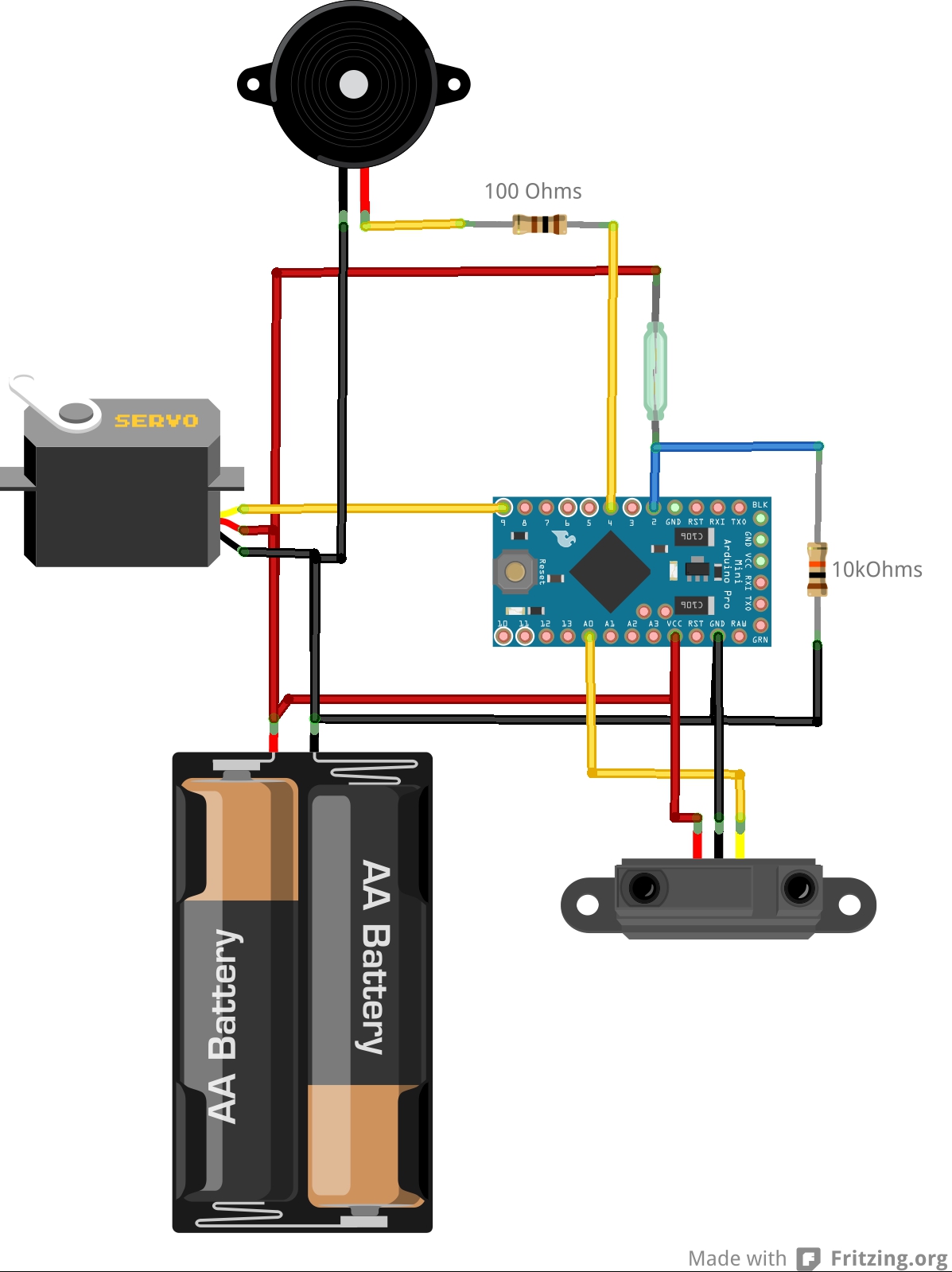
Je veux faire un système automatique d'ouverture/fermeture d'une chatière à base d'arduino comprenant: un interrupteur magnetique, un capteur de distance et un servo...
... et evidemment une pile.
Et c'est là mon problème, choisir la/les pile(s) et bien les connecter à la carte arduino (choisir laquelle fera la plus l'affaire pour une conso la plus faible possible).
J'ai lu:
http://www.robot-mak...-puce-darduino/
et
http://diy-duino.blo...ation-dune.html
mais concrètement, je ne suis pas assez calé pour la mise en pratique hardware.
Par exemple, une question parmi tant d'autres que je me pose :
Puis-je brancher directement deux piles AA en serie sur une arduino pro mini 3.3v ?
J'ai déjà fait le proto avec une carte arduino uno mais reliée au secteur, je voudrais maintenant couper le cordon  />/>
/>/>
Merci pour votre aide
Sleli