

Je crois que vous avez saisie le problème en lisant le titre.
Voilà la bête, il est quesiment entierement en alu, pour les dimensions les bras fond environ 32cm.
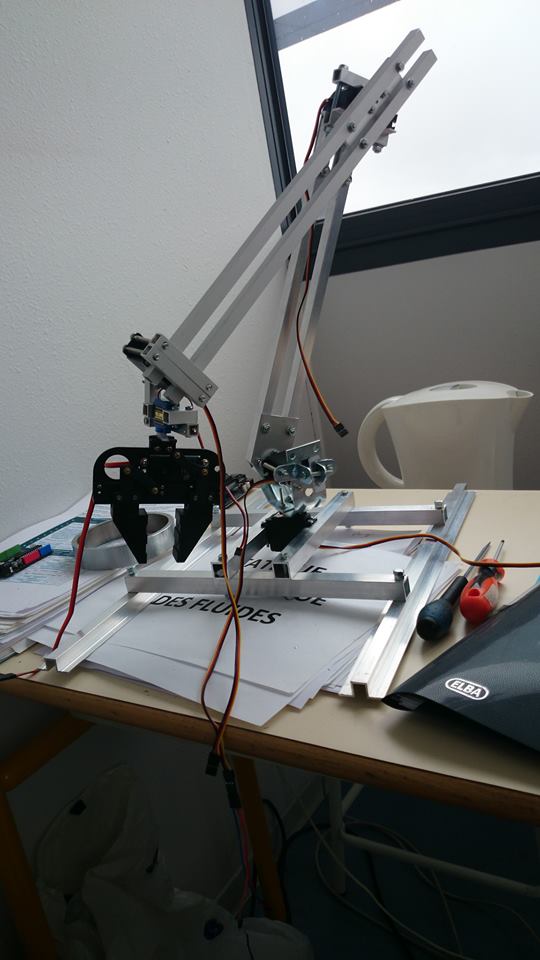
J'avais pris des servos HS422, il sont alimenté par une source externe de 6V 500mA, malgré ça, les servos ne sont pas assez puissant, ils n'arrivent pas à bouger les bras (élévation).
Je suis un peu étonné mais il faut peut être + de couple.
Est ce que quelqu'un pourrait m'indiquer quel type de servo prendre?
Merci


























{kind=link}