En ce jour solennel, j’ai l’honneur de vous présenter mon premier robot Lu-Bot v1
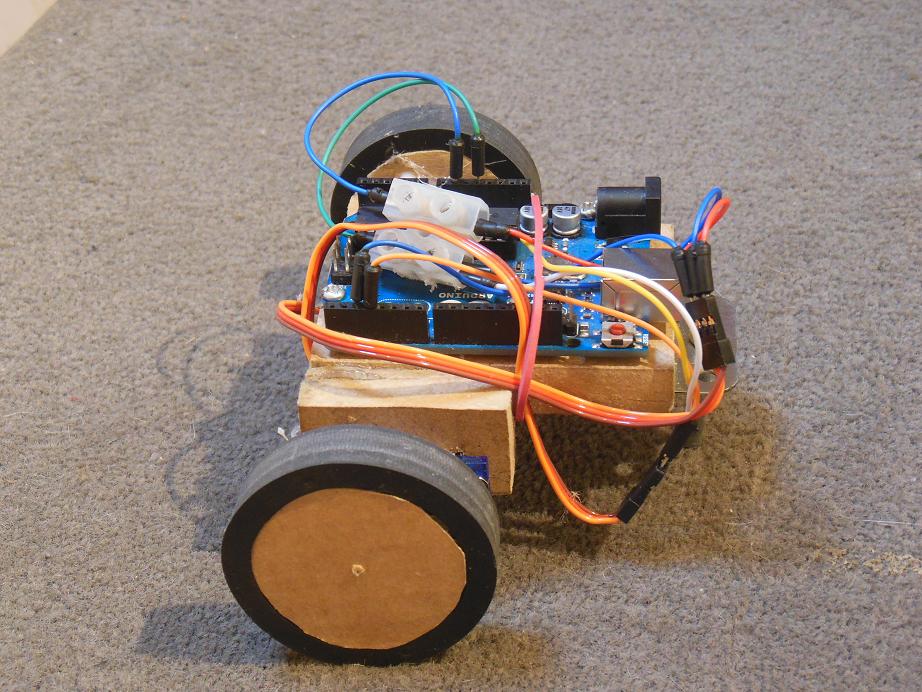
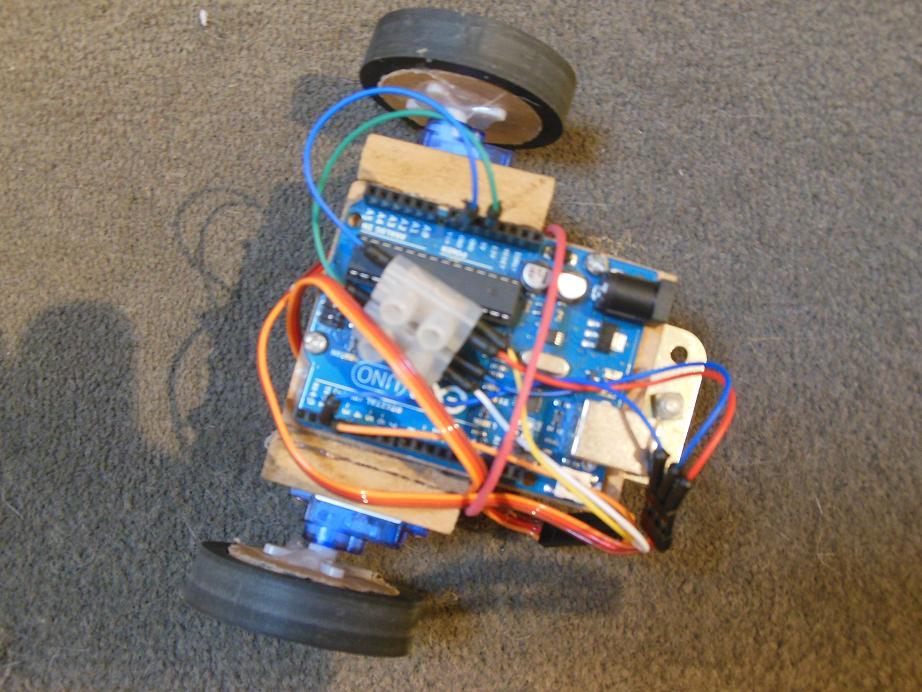

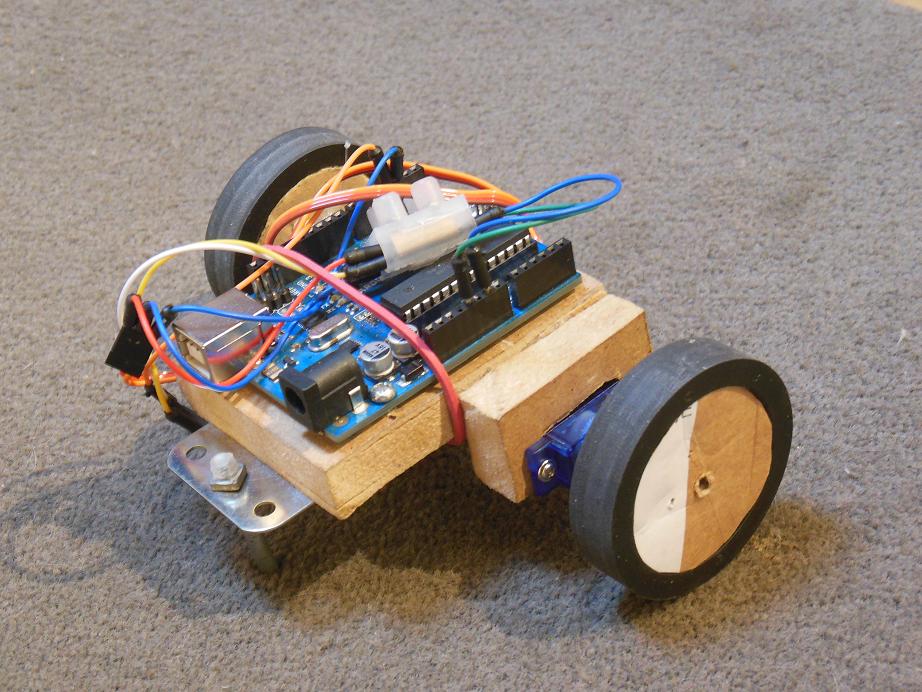
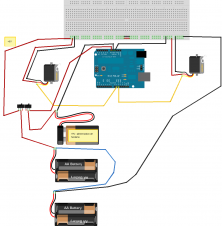
Je suis content car ç'est premier vrai robot. Mon but était de créer une base mobile et j'ai réussi. Je voulais aussi la faire la plus petite possible et c'est pourquoi il y a juste mon arduino et pas ma breadboard. Cependant je n'avais pas les outils adapté pour les pièces en U qui attache les servos et les roues c'est pourquoi les pièces en U sont un peu branlante et que les roue sont en carton. Sur la vidéo, on voit bien qu'il ne roule pas droit et qu'il ne tourne pas de 90°, je pense que c'est du à la qualité des pièces. Je pense économiser pour une dremel pour améliorer la qualité des pièces mais je ne sais pas si c'est une bonne idée...
Quoi qu'il en soit je suis ouvert aux critiques pour m'améliorer.