
Bonjour,
Ca y est je me lance dans ce nouveau sujet en complément de celui de Senior car sa partie mécanique est finalisée alors que j'ai encore beaucoup de questions à ce sujet.
A la base, je cherchais des moto réducteurs planétaires 24V de plus de 300W à 170/200 tr/mn pour pouvoir incorporer les moteurs dans mon chassis. Je ne veux pas fabriquer un système de démultiplication à chaine. J'ai trouvé des moteurs de 200w mais j'ai peur que ça fasse un peu juste, c'est du moins la réponse que j'ai eu sur le site anglais. Je n'ai pas abandonné et si quelqu'un a une idée pour pas trop cher, je posterai peut-être une demande dans la partie mécanique bientôt.
Donc je me suis rabattu sur les moteurs de fauteuil roulant et j'ai trouvé sur ebay un fauteuil pour pièces à 150€. je ne sais pas si vous pensez que le prix est trop élevé mais je vous le donne à titre indicatif.
Je vous joins quelques photos pour vous montrer mon stade d'avancement.
J'ai démonté les moteurs. 300W chacun
J'ai enlevé les freins électromécaniques.
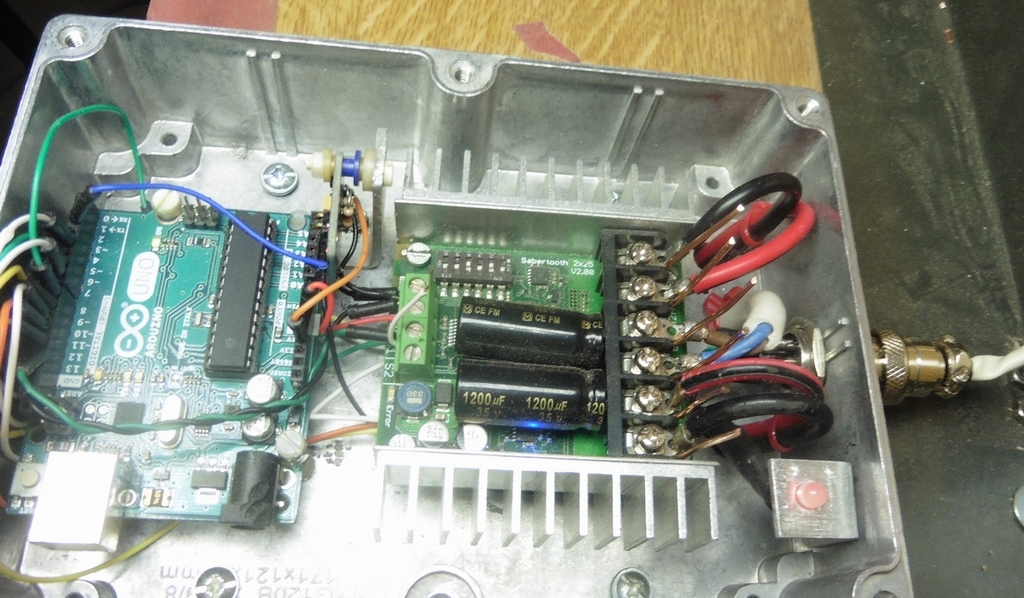
J'ai récupéré la boite de puissance pour y incorporer l'électronique de puissance sabertooth 2x25A.
J'ai fait tourner les moteurs pour vérifier qu'ils fonctionnent. Yes tout semble ok.
Je suis en liaison avec un autre site pour la partie arduino.
http://www.diyelectriccar.com/forums/showthread.php/ovaltines-segway-clone-89471.html
Prochaines étapes:
Création d'une plateforme pour relié les 2 moteurs.
Tests à blanc de l'électronique.
Rachat d'une carte arduino méga car je voudrais y inclure du Bluetooth pour le contrôle à distance.
Design du manche avec gestion d'angle sur potentiomètre. Je fais beaucoup de récupération mais je n'ai encore rien trouvé pour ça. Si quelqu'un a un idée, elle serait bien venue.
Je ne sais pas si c'est une bonne idée de mettre la carte arduino à côté de la puissance dans le même boitier. J'ai peur que ça chauffe et d'avoir également des interférences.
J'ai peur que le sabertooth 2x25A soit un peu juste. Avez vous des retours d’expériences (avec des justifications techniques si possible)?
Merci de me laisser vos remarques et commentaires.
A+

#1

-
- Membres
- 4 messages
Nouveau membre
Posté 03 septembre 2014 - 03:16







#2
-

- Membres
-

- 5â¯663 messages
Pilier du forum
- Gender:Male
- Location:Vendée
- Interests:Robotique, informatique, architecture et patrimoine...
Posté 05 septembre 2014 - 05:59

Le prix des moteurs me semble correct, j'en cherche depuis quelques temps, et vu le prix du neuf ...
Tes moteurs font à peine 16A, donc ta carte 2x25A devrait convenir.
Imprimante 3D : Prusa i3 (MK1) + CR-10S + CR-10 S5 + Artillery Sidewinder X2 + CR-30 + Elegoo Mars + Anycubic Wash & cure 2 + Phrozen Sonic Mega 8K + Phrozen Cure Mega + Tronxy VEHO 600 PRO

#4
-

- Membres
- 6 messages
Nouveau membre
Posté 01 mars 2017 - 10:51
Bonjour,
Comme je l’ai expliqué lors de ma présentation sur le forum, je me suis lancé dans la construction d’un gyropode.
Le système est basé sur un gyroscope/accéleromètre MPU 6050. Les données sont traitées par une carte Arduino Uno,
De là sort un signal qui rentre dans une carte d’interface Sabertooth 2x25.
Les sorties sont reliées à deux puissants moteurs récupérés sur une épave de fauteuil roulant. Le tout est alimenté par deux batteries 24V / 24Ah.
Voici le site où est publié le montage initial
https://www.instruct...and-Easy-Build/
Malgré un câblage vérifié, et les instructions scrupuleusement suivies, le système plante de façon aléatoire.
Les dysfonctionnements ont fait l’objet de deux vidéos que j’ai mis en ligne à destination du concepteur du montage. C’est un ingénieur américain.
https://www.youtube....E1do6thAE&t=44s
Malgré que celui-ci m’ait donné des pistes, aucune n’a permis d’arriver à un bon résultat.
A noter que mes connaissances en matière de code Arduino sont très limitées. J’ai acheté le bouquin « L’Arduino pour les Nuls », mais entre faire clignoter une LED et comprendre le code de plusieurs centaines de lignes du gyropode, il y a de la marge.
Je suis également en contact un canadien et un suisse qui eux aussi ont des difficultés à faire fonctionner la bête.
J’ai aussi demandé à un pro de ce type de système. Voici ce qu’il en pense :
« En fait, ton problème me fait davantage penser à un mauvais réglage de la boucle d'asservissement : gyroscopes/moteurs. Et la solution est sans doute quelque part dans le soft. Ce soft a vraisemblablement été conçu et paramétré pour des moteurs qui réagissaient autrement. Si on change les moteurs ainsi que leur démultiplication la boucle ne sera plus la même. Plus longue ou plus courte, je n'en sais rien, mais c'est une histoire de temps de réaction entre ce que renvoie les gyroscopes et les commandes appliquées aux moteurs. »
Autant dire qu’avec ce type de réponse, je suis complètement largué.
Aussi, je me demande s’il ne faudrait pas remettre le sujet à plat et repartir sur une nouvelle construction.
Voilà donc ce que je cherche dans ce forum :
Une ou des personnes qui auraient mené à bien la construction d’un gyropode, et qui seraient donc en mesure de partager leur expérience.
Merci d’avance pour vos retours
Titi.
#5
-

- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 01 mars 2017 - 12:10
J'ai trouvé des moteurs de 200w mais j'ai peur que ça fasse un peu juste
Ce type de moteur ( avec sa démultiplication mécanique ) est capable de déplacer une personne d'une centaine de kg, tout à fait bien dimensionné donc.
J'utilise ces moteurs
j'ai trouvé sur ebay un fauteuil pour pièces à 150€
J'ai eu beaucoup de chance avec à 50 Euros tout compris sur le bon coin et une après midi pour aller le chercher.
J'ai enlevé les freins électromécaniques.
Effectivement les freins sont inutiles, voire même déconseillés dans cette application car ils sont un peu brutaux :-)
Le freinage est réalisé par le contrôleur sabertooth.
J'ai récupéré la boite de puissance pour y incorporer l'électronique de puissance sabertooth 2x25A.
Je ne sais pas si c'est une bonne idée de mettre la carte arduino à côté de la puissance dans le même boitier. J'ai peur que ça chauffe et d'avoir également des interférences.
J'ai peur que le sabertooth 2x25A soit un peu juste. Avez vous des retours d’expériences (avec des justifications techniques si possible) ?
En voilà une excellente idée.
J'ai un montage où un sabertooth côtoie un arduino micro sans avoir noté de perturbation.
Le sabertooth 2x25 est un excellent composant qui doit convenir à ton montage ( j'utilise le 2x32 car il possède en plus un port USB )
La carcasse du boîtier peur également jouer le rôle de refroidisseur même s'il n'y en a pas réellement besoin.
La section des câbles semble très bien.
Excellente poursuite de ce projet.
#6
-

- Administrateur
-
- 10â¯222 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 01 mars 2017 - 02:21
« En fait, ton problème me fait davantage penser à un mauvais réglage de la boucle d'asservissement : gyroscopes/moteurs. Et la solution est sans doute quelque part dans le soft. Ce soft a vraisemblablement été conçu et paramétré pour des moteurs qui réagissaient autrement. Si on change les moteurs ainsi que leur démultiplication la boucle ne sera plus la même. Plus longue ou plus courte, je n'en sais rien, mais c'est une histoire de temps de réaction entre ce que renvoie les gyroscopes et les commandes appliquées aux moteurs. »
Je n'ai pas encore regardé les vidéo, mais comme le dit ulysse le matériel sélectionné est bon. ( J'utilise aussi ce materiel, en terme de carte moteur de puissance etc... )
Cette description correspond à un problème d'asservissement ( surement un PID ) et donc bien uniquement soft .
Je te conseil de poster ton code,
Il y a un outil en ligne qui peut faciliter el fait de t'aider qui s'appel " arduino web editor " Copie colle ton code dessus et partage nous le lien 
De mon côté je vais regarder un peu plus en détail tes configurations et les vidéo pour pouvoir te faire des propositions
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#8
-
- Membres
- 6 messages
Nouveau membre
Posté 02 mars 2017 - 05:48
Bonjour,
D'abord merci aux personnes qui m'ont souhaité la bienvenue sur ce forum, et aussi à MIKE 118 et Ulysse pour leur message.
Déjà une bonne nouvelle, vous confirmez que le matériel est bon.
Pour répondre à Ulysse, c'est vrai que dans ma première vidéo, j'ai fait les tests avec des moteurs de lève-vitres en 12 V.
Dans la seconde video, ce sont de robustes moteurs 24 V provenant d'un fauteuil roulant. J'ai enlevé les freins. Ce sont quasiment les mêmes moteurs que ceux utilisés par AQMCONSEILS en haut de ce sujet de discussion
Je les ai eu gratos chez un revendeur de matos médical.
Cela m'a quand même coûté de faire quelques kouign amann qui est le gâteau le meilleur du monde - j'ai gagné le concours du meilleur kougn amnn en 2014 à Douarnenez dont c'est la grande spécialité.
Revenons à notre bécane.
Voir les photos ci-jointes pour la structure et ses moteurs + la partie électronique. Comme vous pourrez le constater, c'est bien avancé au niveau hardware.
Voir ici un lien DROPBOX sur lequel j'ai déposé le code :
https://www.dropbox....tal_89.ino?dl=0
Je ne doute pas que vos yeux d'expert puissent le digérer, et tirer quelques pistes de travail.
Question posée à AQMCONSEILS :
Nous semblons avoir quasiment la même config (mise à part la carte gyroscope)
Es-tu arrivé à faire tourner correctement le système ?
Si oui, la solution pour moi serait peut-être de me caler sur tes travaux.
Merci encore pour votre assistance (enfin un forum actif...)
Kenavo,
titi la Bretelle
Image(s) jointe(s)

#9
-
- Membres
-
- 486 messages
Habitué
- Gender:Not Telling
Posté 02 mars 2017 - 09:07
Pour mettre au point ce montage et y aller pas à pas, peut-être serait-il possible d'éditer le .ino pour qu'il réalise quelques fonctions simples de base : stop, à fond en avant, à fond en arrière, à fond à droite et à gauche... le tout en boucle pour faire bouger la mécanique et le cablage et voir comment ça se comporte sans dialogue avec le MPU 6050.
Si c'est fiable on passe à l'étape suivante, uniquement des mesures en boucle et dans tous les sens sur le MPU 6050 pour voir la robustesse du dialogue et la répétabilité des mesures...
Par étape on doit pouvoir mettre le doigt sur ce qui provoque cet emballement des moteurs.
#10
-
- Administrateur
-
- 10â¯222 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 05 mars 2017 - 11:54
Bon ci dessous le code original donné par titi , plus pratique à visualiser ainsi =)
Maintenant reste à tailler dedans pour faire des essais comme suggéré par ulysse
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#13
-
- Membres
- 6 messages
Nouveau membre
Posté 09 mars 2017 - 05:36
Bonjour,
Dans un message précédent, je disais que le code mis en ligne par MIKE 118. C'est le cas sur ce forum, mais chez moi en local, je le vois bien s'afficher.
Par ailleurs, j'ai voulu vérifier le fonctionnement de la carte Sabertooth. J'ai trouvé un programme de test qui prends en compte exactement la même config.
La manip consiste à faire tourner les moteurs dans les 2 sens et à des vitesses différentes. Le test a réussi.
J'étais donc assez satisfait, mais une heure plus tard avec le programme du segway, plus rien, les moteurs ne tournent plus. J'ai rechargé le code du programme de test, et là aussi plus rien.
Je vais poursuivre les tests.
Auriez-vous un bout de code pour tester la carte ?
@+
Titi
#14
-
- Administrateur
-
- 10â¯222 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 10 mars 2017 - 12:22
sur la sabertooth il y a des switch pour faire des réglages, tu en aurais pas touché un par inadvertance ?
Si mon commentaire vous a plus laissez nous un avis !
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!

Répondre à ce sujet









1 utilisateur(s) li(sen)t ce sujet
0 members, 1 guests, 0 anonymous users




