

Bonjour,
Je commence à mettre en plans à des améliorations pour la seconde version :
Le premier point sera une vraie carte d'alimentation avec les options suivantes :
- Interrupteur général d'alimentation
- Détection de batterie faible, et coupe toute l'alimentation si tension trop faible
- Protection contre l'inversion de polarité (si mauvais branchement de la batterie), le circuit n'est pas alimenté
- 2 Régulateurs 5V 1A pour l'arduino (+ peut être une future raspberry) et pour les capteurs
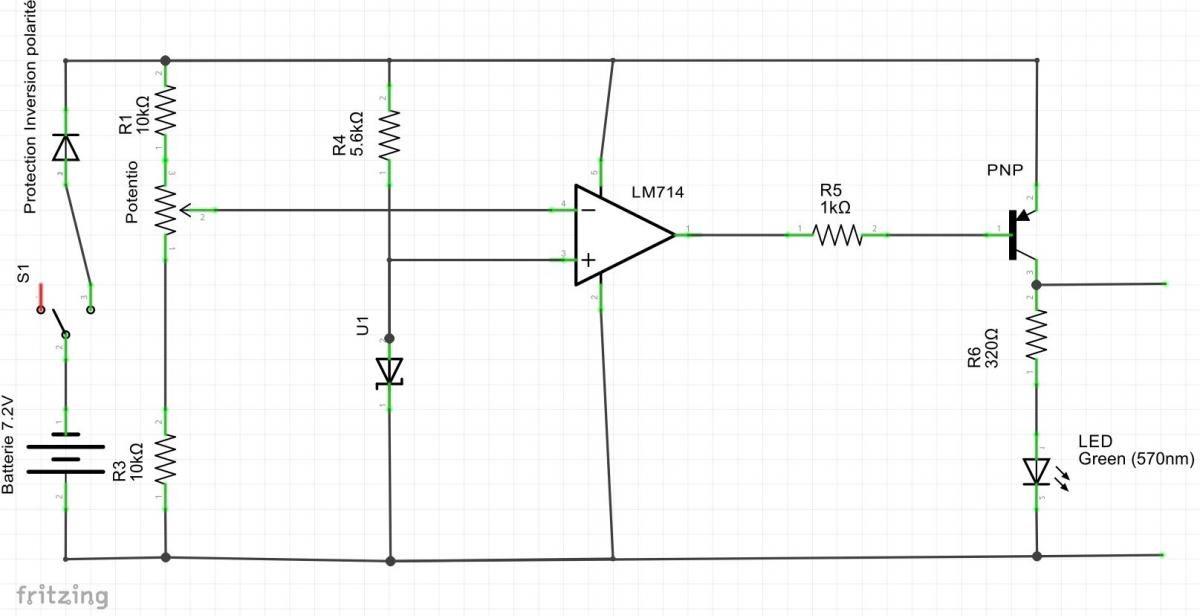
Pour réaliser la détection de batterie faible, un petit montage avec un AOP en comparateur. La tension de référence est fixée par une diode zéner. Un potentio pour ajuster au mieux le seuil de tension faible de batterie : Vseuil = E*[(Rc +R2)/(R1+R2+Rc)]
En sortie de l’AOP, un transistor PNP qui sera bloqué si la tension de sortie est négative (tension de batterie est faible) et passant dans le cas contraire (batterie chargé).
Sur le collecteur du transistor, une résistance et une LED verte pour vérifier d’un coup d’œil l’état du circuit. En parallèle viendra les régulateurs de tensions 5V et l’alimentation des moteurs.
Après pour minimiser l’énergie consommé par le montage, il me suffira d’augmenter la résistance R4 tout en vérifiant que la tension de la diode zéner est reste stable. Il faudra que je fasse quelques essais (malheureusement pas tout de suite)
Le transistor va devoir supporter l’intégralité du courant qui circule dans le montage (moteurs + arduino/capteurs) ce qui peut monter assez haut (1A/moteur en bloqué) donc au max de consommation du 6A je pense.
Je voulais avoir votre avis sur ce schéma, étant donné qu’il sort de mes vieux souvenir d’élec, et aussi que me conseilleriez-vous comme transistors je n’ai pas l’habitude d’en utiliser comme ça?
















