Bonjour tout le monde !
Alors voilà, pour mon premier robot, je compte me lancer dans le Robot Cedra, dont le tuto est disponible ici: http://www.robot-maker.com/tutorials/article/78-rcerda-un-robot-raspberry-pi-pour-100-120
Avant de commander les pièces, j'aurai quelques questions !
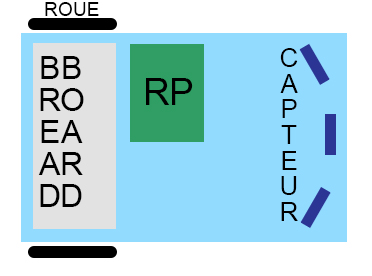
En fait, je souhaiterai changer les capteurs de pression par des capteur de distance placé en arrondi (à 45° l'un de l'autre disons).
Je voulais savoir deux choses.
1 - Puis-je prendre d'autres capteur que ceux cité dans le tuto ? Je pensais à ce genre de capteurs (tout simplement parce que c'est ce genre que je voie partout ailleurs ^^) :

2 - Au niveau du code, quelqu'un serais susceptible de m'aider ? (Je suppose qu'il faudra en changer une partie.) Pour être honnête, je n'y connais pas grand chose en programmation.
Le capteur central, qui est donné sur le tuto, dit de pivoter de x° si on s'approche d'un obstacle, hors si c'est un des capteurs sur le cotés qui détecte, il faudrait que le robot ne pivote pas autant logiquement, de plus, il faudrait qu'il ne tourne pas du même sens si le capteur gauche ou droit qui capte.
J'ai hésité à poster maintenant, me disant qu'il vaudrait mieux une fois que le robot serais au moins commencer, mais en même temps, si je doit changer des pièces, autant demander avant de ne passer la commande  .
.
D'avance merci à tous,
Nicolas.