
Transistance à parfaitement pointer le problème : la carte fonctionne visiblement en logique 24V...
Avec Vcom devant être entre 18 et 27 V ( cf page 7 de la doc technique ! )
soit tu adaptes tes niveaux logique soit tu changes de cartes. En tout cas tu peux faire un teste en mettant du +24V su Vcom et brancher puis débrancher la masse de ce 24V sur step manuellement ... normalement ton moteur devrait bouger pas par pas.
Tu peux même faire le test sans tes moteurs de brancher, pour vérifier que la tension en sortie de la carte ( sur les prise sur lesquels tu branche tes moteurs ) varie bien à de manière cyclique lorsque tu fais les changements de pas.
Après tu t'es peut être trompé lors du branchement des fils des moteurs pas à pas aussi ! 

#21

-

- Administrateur
-

- 10â¯222 messages
Staff Robot Maker
- Gender:Male
- Location:Anglet
- Interests:Robotique, Entrepreneuriat, Innovation, Programmation, Résolution de problème, Recherche de solutions, Mécanique, Electronique, Créer, Concevoir
Posté 17 janvier 2015 - 03:24
Si mon commentaire vous a plus laissez nous un avis ! 
Nouveau sur Robot Maker ?
Jetez un oeil aux blogs, aux tutoriels, aux ouvrages, au robotscope aux articles, à la boutique et aux différents services disponible !
En attendant qu'une bibliothèque de fichiers 3D soit mise en place n'hésitez pas à demander si vous avez besoin du fichier 3D d'un des produits de la boutique... On l'a peut être !
Si vous souhaitez un robot pilotable par internet n'hésitez pas à visiter www.vigibot.com et à lire le sous forum dédié à vigibot!
#22
-
- Membres
- 99 messages
Membre
- Gender:Male
- Location:Derrière mon pare-feu
- Interests:Informatique, programmation, développement, spaghettis
Posté 20 janvier 2015 - 11:03
Effectivement je mettais le 24V sur le Step et le 0V sur le Vcom... En inversant ça marche enfin ! 
Mais au final j'ai quand même pris un shield spécial Arduino, comme ça, j'ai direct les bonnes librairies.
La théorie, c'est quand ça marche pas, mais on sait pourquoi.
La pratique, c'est quand ça marche, mais on sait pourquoi.
Quand la pratique rejoint la théorie, ça marche pas et on sait pas pourquoi
#23
-
- Membres
- 99 messages
Membre
- Gender:Male
- Location:Derrière mon pare-feu
- Interests:Informatique, programmation, développement, spaghettis
Posté 10 mars 2015 - 07:19
J'ai enfin de l'avancement après un mois d'attente de pièces  (les commandes sont longues a faire transiter dans l'usine chez moi...)
(les commandes sont longues a faire transiter dans l'usine chez moi...)
J'ai conçu le robot secondaire qui s'occupera de monter les marches.
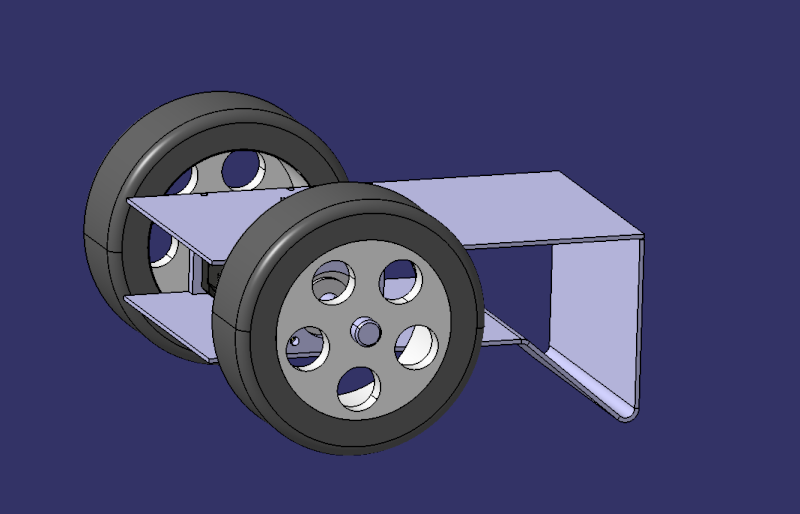
Et monté il donne ça:
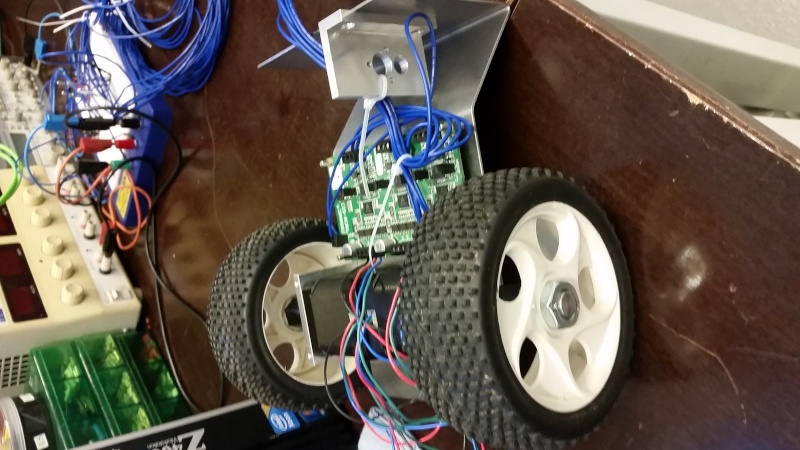
Il est cablé pour le moment parce que je n'ai pas encore reçu les batteries et je n'ai pas fait le programme arduino avec le shield pour pas-à-pas. Donc je commande tout avec deux switch, c'est assez galère à contrôler quand on va vite 
Par contre j'ai un problème à résoudre, il ne monte pas toujours les escaliers, l'ampérage fourni par mon alim ne doit pas suffire à mon avis, je vais essayer en mettant 2x24V/2A en parallèle, peut être que ça ne sautera plus de pas.
La théorie, c'est quand ça marche pas, mais on sait pourquoi.
La pratique, c'est quand ça marche, mais on sait pourquoi.
Quand la pratique rejoint la théorie, ça marche pas et on sait pas pourquoi
#24
-

- Modérateur
-
- 2â¯210 messages
Pilier du forum
- Gender:Male
- Location:Aquitaine,Gironde
- Interests:Tout
Posté 10 mars 2015 - 03:40
il ne monte pas toujours les escaliers,
Tu aurai une video stp, sont fonctionnement a l'air assez curieux .
Page Facebook : https://www.facebook...appartelier2.0/
Page Twitter : https://twitter.com/2Appartelier (bateau seulement)
Boutique Robot-Maker : https://www.robot-ma...er-20/produits/
Besoin d'une impression 3D grand format ? Contactez moi !
#25
-

- Membres
-
- 411 messages
Habitué
Posté 10 mars 2015 - 04:11
Il faut dire que les pas à pas ne sont peut être pas les meilleurs candidats pour cette tâche. D'après la photo ils sont monté directement sur les roues sans réduction, de plus les roues ont un rayon important (a vue de nez je dirais 50 ou 60mm). Ces trois facteurs cumulés participent à opposer un couple plus important que celui fourni par tes moteurs. Ce n'est qu'une hypothése.
Tu commandes tes moteurs en pas entier ?
N'oubliez jamais que "Ban Ki-moon n'attrape pas mousse"
#26
-
- Membres
- 99 messages
Membre
- Gender:Male
- Location:Derrière mon pare-feu
- Interests:Informatique, programmation, développement, spaghettis
Posté 11 mars 2015 - 07:30
J'ai le choix (juste un jumper à mettre pour les demi-pas)
Mais j'ai pris ces grosses roues parce que les marches du terrain font 20mm de haut.
85mm de roue contre 20mm de marche je vous laisse faire le calcul
Pour la vidéo, je peux en mettre une directement sur le forum ou je dois me faire un compte youtube ?
Et transistance, pour les pas-à-pas, Je n'ai pas de contrôle de position autre que les pas que je fais. ça me permet d'être plus précis qu'avec des DC standards et prend moins de place qu'un codeur. Ils ont un couple de 0,49nm ce qui est suffisant je pense pour monter 5 marches de 20mm. (enfin je l'espère sinon je suis dans la merde)
La théorie, c'est quand ça marche pas, mais on sait pourquoi.
La pratique, c'est quand ça marche, mais on sait pourquoi.
Quand la pratique rejoint la théorie, ça marche pas et on sait pas pourquoi
#27
-
- Membres
-
- 411 messages
Habitué
Posté 11 mars 2015 - 10:42
Mais j'ai pris ces grosses roues parce que les marches du terrain font 20mm de haut.
85mm de roue contre 20mm de marche je vous laisse faire le calcul
Oui je ne remet pas en cause tes choix, sois rassuré
Ce que je voulais dire c'est que plus le rayon de ta roue est important, plus l'effet bras de levier qui s'oppose au couple développé par ton moteur est important. Ceci d'autant plus, qu'il n'y a pas de réducteur pour multiplier le couple de tes moteurs.
0,49nm est sans doute suffisant pour monter 5 marches de 20mm (je te fais confiance pour les calculs) mais avec un moteur pas-à-pas le couple n'est pas régulier! Il est aussi bon de savoir que plus la vitesse du pas à pas est importante, plus son couple diminue.
N'oubliez jamais que "Ban Ki-moon n'attrape pas mousse"
#28
-
- Membres
- 99 messages
Membre
- Gender:Male
- Location:Derrière mon pare-feu
- Interests:Informatique, programmation, développement, spaghettis
Posté 11 mars 2015 - 11:19
Oui je ne remet pas en cause tes choix, sois rassuré
J'espère bien voyons 
On verra ce que cela donne dans quelques semaines... J'ai le principal a finir déjà.
Dites, j'ai une question métaphysique... J'ai acheté pour contrôler les PAP, la carte adafruit Motor Shield v2.3
Ils me disent qu'elle est stackable, mais comment j'utilise mes I/O si la carte vient se mettre dessus ? 
EDIT: En fait j'ai pas vu que c'était un bus i2c... J'ai qu'à juste mettre les pins pour me connecter direct sur la carte 
La théorie, c'est quand ça marche pas, mais on sait pourquoi.
La pratique, c'est quand ça marche, mais on sait pourquoi.
Quand la pratique rejoint la théorie, ça marche pas et on sait pas pourquoi
#29
-
- Membres
- 99 messages
Membre
- Gender:Male
- Location:Derrière mon pare-feu
- Interests:Informatique, programmation, développement, spaghettis
Posté 09 août 2015 - 05:38
Hello, après plusieurs semaines d'absence, (je suis en plein service militaire :/ ), voici le résultat de cette année de travail sur ces robots.
J'ai réussi à faire tourner le robot secondaire à 100% de ses tâches (malgré quelques bugs) et le robot principal à 50%
Voici une vidéo du robot principal lors de la phase d'essai
https://drive.google...iew?usp=sharing
Et du gros
https://drive.google...iew?usp=sharing
Vous constaterez que la pince ne sers à rien. J'ai pas assez de couple sur le moteur pour faire tourner la vis ^^'.
J'ai réussi à me classer 12e sur 27 lors du concours (dont 14 qui ont passé l'homologation de base) et ce fut une excellenete expérience ! Je vous conseille de trouver un club pour participer l'année prochaine
Si vous avez des questions sur le principe de fonctionnement, la mécanique ou autre, j'y répondrais volontiers et quant à moi je vais continuer avec un nouveau projet personnel.
A+ les makers
La théorie, c'est quand ça marche pas, mais on sait pourquoi.
La pratique, c'est quand ça marche, mais on sait pourquoi.
Quand la pratique rejoint la théorie, ça marche pas et on sait pas pourquoi
Répondre à ce sujet









0 utilisateur(s) li(sen)t ce sujet
0 members, 0 guests, 0 anonymous users




