

Bonjour !
Ce tutoriel a pour but d'aider au branchement et au contrôle du servomoteur Feetech STS3032 (360°).
Ce servomoteur peut être facilement contrôlé par Arduino à l'aide d'un convertisseur TTL/RS485 FE-URT-1 de chez Feetech.
Branchement du servomoteur et du convertisseur
Il faut donc se munir d'un convertisseur, en plus de notre servomoteur.
Contrôle du servomoteur
Pour contrôler notre servomoteur, il faut installer un logiciel. Le dossier se trouve sur le GitHub de Robot-Maker.
Pour pouvoir le faire bouger, la manipulation est plutôt simple :
Voilà !
Ce tutoriel a pour but d'aider au branchement et au contrôle du servomoteur Feetech STS3032 (360°).
Ce servomoteur peut être facilement contrôlé par Arduino à l'aide d'un convertisseur TTL/RS485 FE-URT-1 de chez Feetech.
Branchement du servomoteur et du convertisseur
Il faut donc se munir d'un convertisseur, en plus de notre servomoteur.
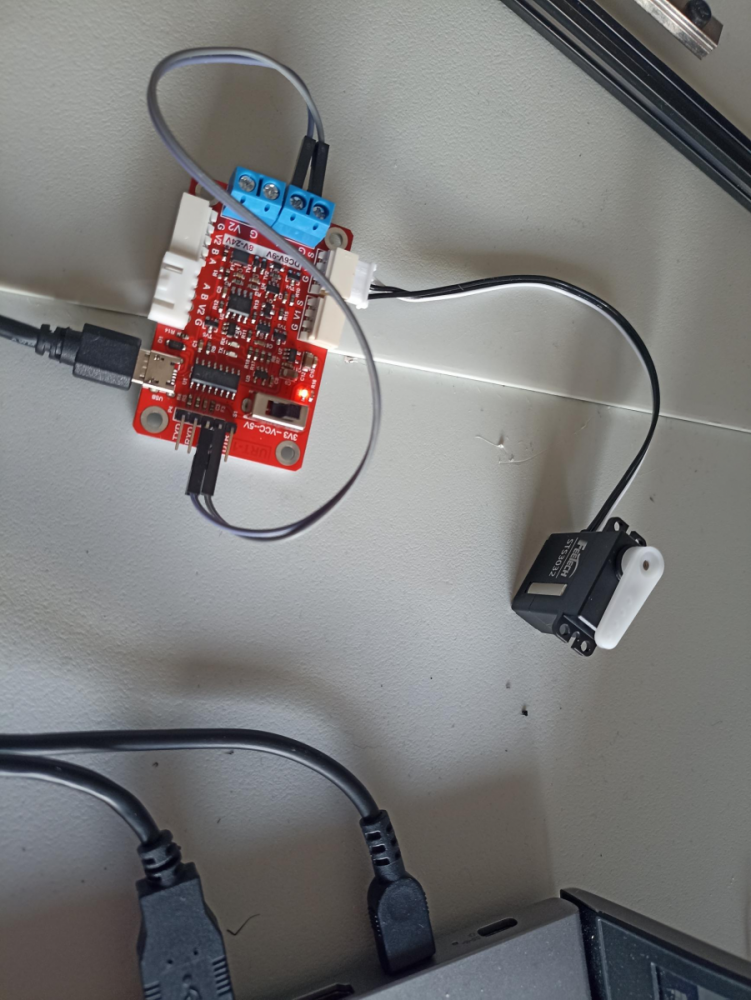
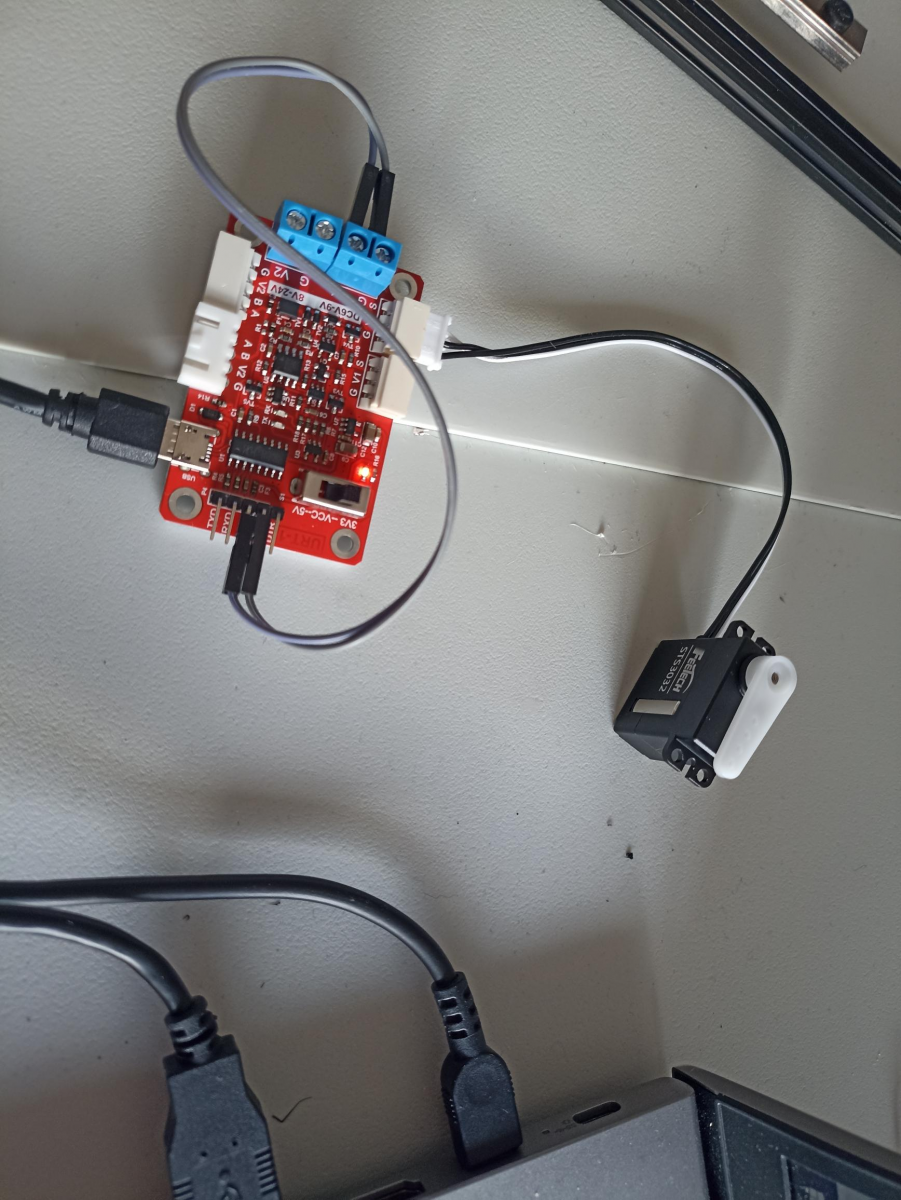
- Relier le fil blanc du servomoteur sur l'entrée S du convertisseur, le fil noir du milieu sur l'entrée V1 et le fil noir du côté sur l'entrée G
- Relier le convertisseur à l'ordinateur grâce à un câble USB, cela sera donc l'alimentation de notre convertisseur et de notre servomoteur
- Relier la pin 5V (située à côté de l'entrée USB) sur le bornier à vis bleu "DC 6V-9V" au V1
- Relier la pin GND (située à côté de l'entrée USB) sur le bornier à vis bleu "DC 6V-9V" au G
- Voilà, votre branchement est enfin prêt !
Contrôle du servomoteur
Pour contrôler notre servomoteur, il faut installer un logiciel. Le dossier se trouve sur le GitHub de Robot-Maker.
- Méthode 1 : Aller sur le GitHub de Robot-Maker ( https://github.com/Robot-Maker-SAS ), puis sur "FeetechServo", puis sur "Feetech debug tool master", puis sur "FD1.9.8.2"
- Méthode 2 : Suivre ce lien vous y emmenant directement : https://github.com/R...aster/FD1.9.8.2
- Télécharger les 4 fichiers (oui oui, même ceux qui ont un titre en chinois)
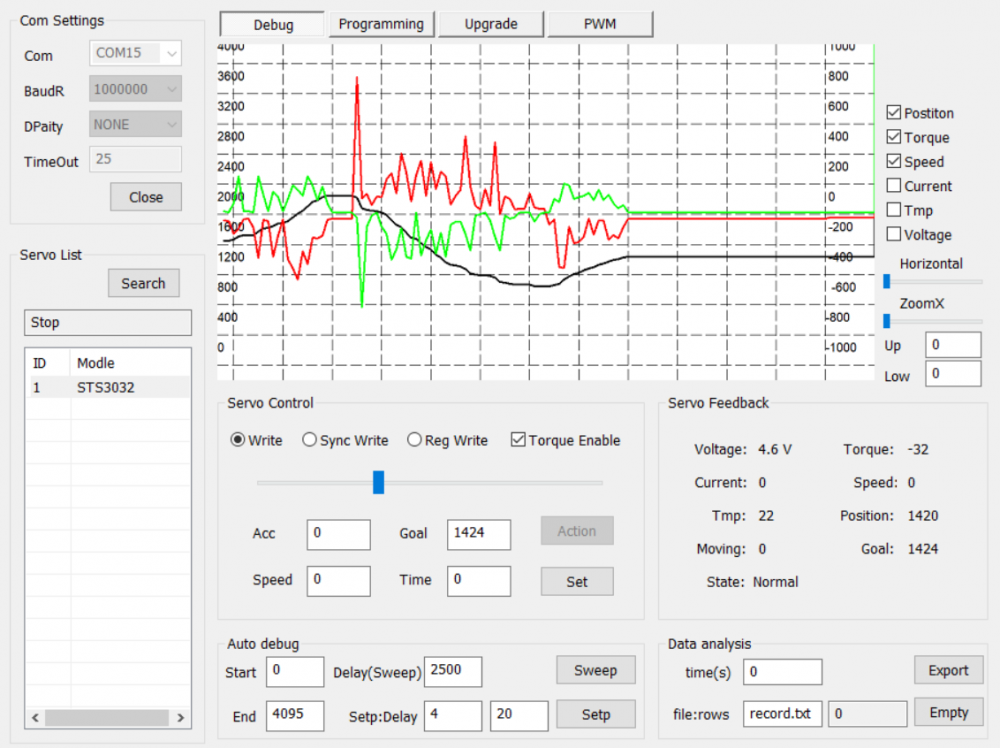
- Ouvrir l'application "FD" (aussi appelée "FTC SCServo Debug")
- Sélectionner le port COM de notre servomoteur
- Sélectionner le baud rate correspondant à votre servomoteur. Dans notre cas 1 000 000 pour le sts3032
- Cliquer sur "Open" puis sur "Search"
- Dans la fenêtre en bas à gauche, sélectionner notre servomoteur
- Voilà, le servomoteur est prêt à être utilisé !
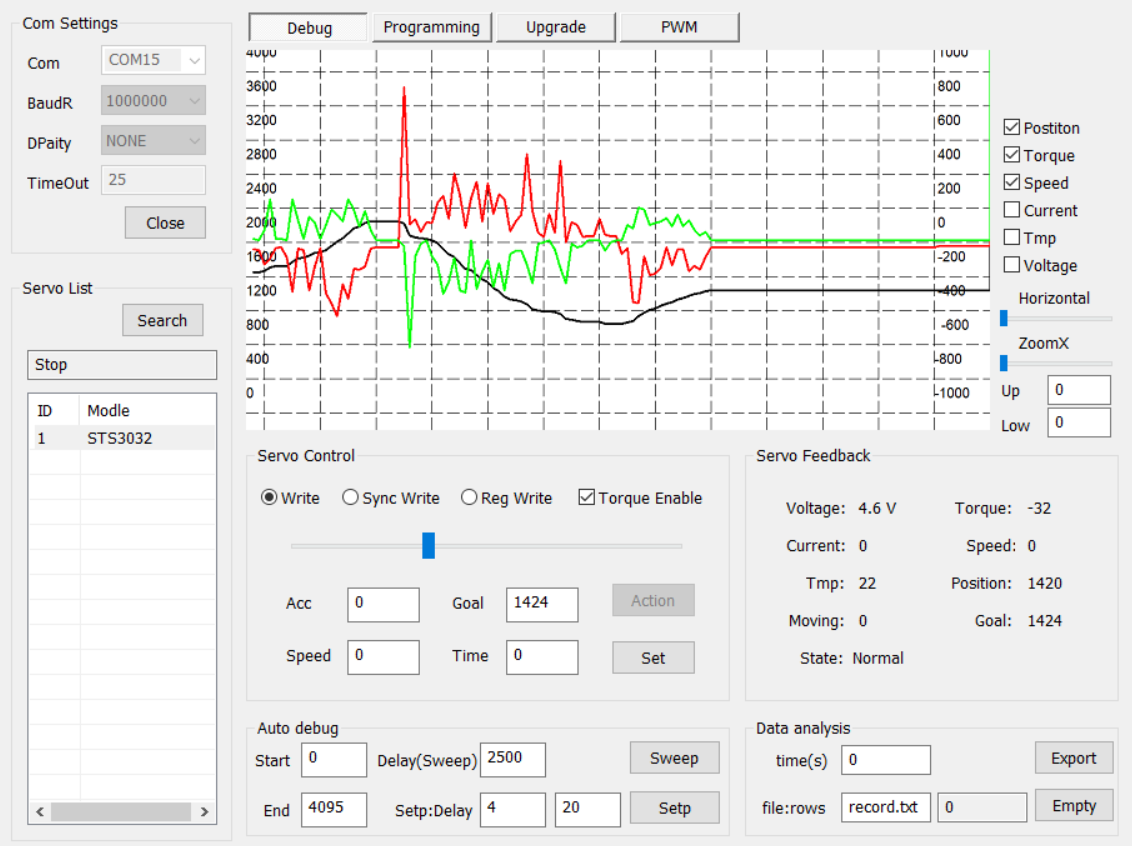
Pour pouvoir le faire bouger, la manipulation est plutôt simple :
- Déplacer le curseur de "Servo Control" et notre servomoteur va bouger, on remarquera que la valeur dans "Goal" va aussi varier (entre 0 et 4095 car la résolution est sur 12 bits)
Voilà !












