

Introduction
Vous avez décidé de vous lancer dans un robot, qui vous servira par exemple de base pour tester divers composants et micro-contrôleurs?
Ne négligez pas la partie mécanique !
Elle devra supporter toutes vos applications et être fiable.
Ici, je vous propose de construire une base. Je ne vous apprends pas à construire un robot complet, je vous montre juste comment construire une bonne base mécanique, pour pouvoir par la suite développer vos propres applications.
Je ne vous apprends pas à construire un robot complet, je vous montre juste comment construire une bonne base mécanique, pour pouvoir par la suite développer vos propres applications.
Ce robot se déplacera grâce à deux roues entrainées par deux servomoteurs modifiés en moteurs à courant continu.
Partir sur de bonnes bases
Ici, nous allons réaliser le châssis qui servira de support à votre électronique.
En quelle matière ?
Nous aurions pu utiliser de nombreuses matières comme le fer, le PVC, le plastique, etc.
Mais j'ai préféré utiliser du bois, pour sa simplicité de mise en forme (il est plus facile de scier du bois que de l'acier  ).
).
Voilà ce qu'il nous faut :
une plaque de contreplaqué de 5 ou de 6 min d'épaisseur.
une scie à bois
une lime à bois
une perceuse
Je vous laisse le soin de vous procurer tout cela.
La fabrication :
Ca y est, vous avez tout ?
Tracez tout d'abord le châssis avec un crayon à papier sur la plaque en bois comme sur le schéma suivant :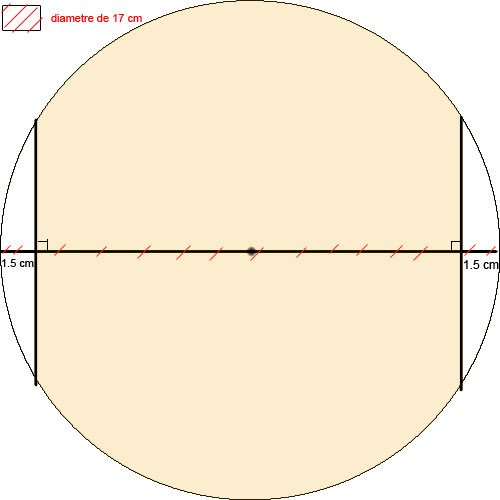
Le robot sera - comme vous pouvez le voir - de forme ronde et de diamètre assez large, pour avoir la place de mettre tous les composants.
Découpez-le ensuite à l'aide d'une scie et d'une lime à bois - ou encore d'une scie sauteuse - et percez-le au centre à l'aide d'une perceuse et d'un forêt au diamètre assez important comme 10 min. Voilà : maintenant que j'ai tout dit, à vous de jouer
Voilà : maintenant que j'ai tout dit, à vous de jouer  .
.
Maintenant, nous allons passer aux roues pour qu'il puisse rouler, notre beau petit robot  .
.
Pour que notre robot puisse avancer, j'ai choisi comme moyen de locomotion les roues  . Les roues
. Les roues
Matériel :
Les roues seront en bois, il faudra une plaque de bois d'environ 1 cm d'épaisseur. Il va nous falloir également une perceuse et une scie cloche de 60 mm de diamètre : Pour ne pas que les roues dérapent, il va falloir les équiper de petits pneus en caoutchouc.
Pour ne pas que les roues dérapent, il va falloir les équiper de petits pneus en caoutchouc.
Les pneus des petites roues lego feront l'affaire .
Nous fixerons ensuite les roues sur deux servomoteurs modifiés en moteur à courant continu.
Fabrication :
Découpez à l'aide de la scie cloche deux roues de 60 mm de diamètre dans la plaque de bois, puis recouvrez-les des petits pneus lego.
Voilà ce que cela donne chez moi :
Fixez-les ensuite sur les servomoteurs comme sur ce schéma :
Et voilà le travail :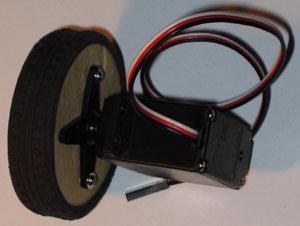
Nous avons désormais deux belles roues qu'il va falloir fixer sur le châssis.
Ah la la... La fixation des servomoteurs... Ce n'est pas le plus facile.
Je vais ici vous présenter la méthode que j'ai utilisé.
La fixation des servomoteurs
Ma méthode :
Pour fixer les servomoteurs, je découpe une pièce en fer que je perce pour que les trous correspondent à ceux du servomoteur.
Je crois que vous comprendrez mieux avec une photo :
Vous comprenez le principe ?
L'usinage des pièces en fer :
Tracez la pièce sur une plaque de fer, et découpez-la avec une scie à métaux.
Tracez ensuite les trous et percez-les avec une perceuse (sans blague o_O ) et un forêt de la bonne taille.
Et voilà, vous avez une belle pièce : Maintenant, répétez l'opération 3 fois : nous aurons besoin de 4 pièces pour fixer les deux servos.
Maintenant, répétez l'opération 3 fois : nous aurons besoin de 4 pièces pour fixer les deux servos.
Fixation : Il va vous falloir 4 petites vis à bois et 8 vis/écrous.
Il va vous falloir 4 petites vis à bois et 8 vis/écrous.
Fixez les servomoteurs, de façon que leurs axes soient au centre du robot :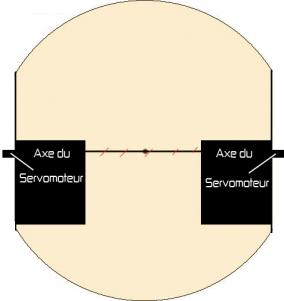
Voilà quelques photos du robot à ce stade :
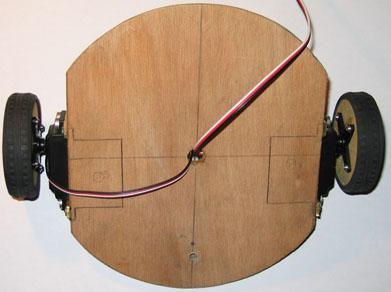
Vous l'avez sûrement remarqué, le robot penche d'un côté, et pour arranger tout cela, nous allons installer une 3ème roue pour que le robot soit parfaitement plat.
Pour ne pas que le robot penche d'un côté, il va falloir rajouter une troisième roue.
La troisieme roue
Préparation :
Percez le châssis à l'aide d'un forêt de 5 mm de diamètre comme sur le schéma suivant :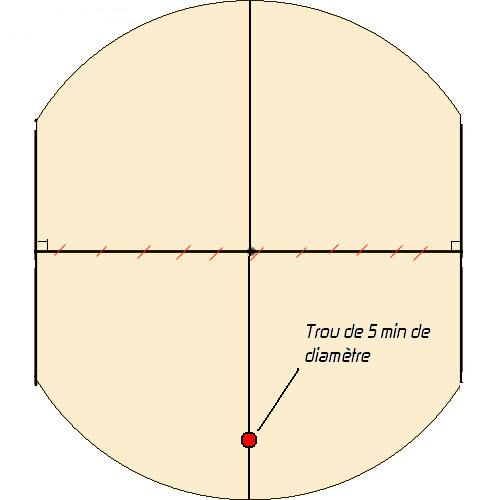
Matériel :
Il va nous falloir :
une tige filetée de 5 mm de diamètre ainsi que des écrous 
une perle en bois (que vous emprunterez - gentiment bien sûr - à votre petite soeur :| . )
un petit niveau pour contrôler la planéité du châssis du 
Construction :
Pliez la tige filetée à 90° et emprisonnez-la entre des écrous comme sur la photo ci-dessous : Attention, la perle doit pouvoir tourner sans frottements.
Attention, la perle doit pouvoir tourner sans frottements.
Fixez ensuite la tige sur le châssis (dans le trou percé au début de ce tuto) de façon que le châssis soit bien parallèle au sol.
Aidez-vous du petit niveau.
Et voilà notre petit robot :
Vous pouvez ensuite couper le petit bout de tige filetée qui dépasse .
- Ancelin aime ceci












