

Introduction
N'avez vous jamais rêvé de créer un robot qui se dirige tout seul selon le marquage au sol ? Je vais vous présenter un système qui pourra alors certainement ajouter une brique nécessaire à votre rêve.
Ce système est adapté pour capter le positionnement d'une ligne blanche sur un fond sombre. Cependant, il ne présente que l'aspect capteur du robot, ce tutoriel ne vous permettra pas à lui seul de construire ce robot suiveur de ligne blanche. Il ne nécessite pas énormément de matériel. Je vous propose maintenant d'en comprendre le principe global et de le concevoir.
Principe
Nous allons tout d'abord nous pencher sur le principe de ce système, comprendre comment il fonctionne.
Tout d'abord, je souhaite éclaircir un point simple mais important:
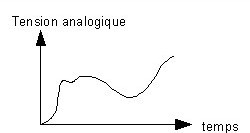
- Une tension analogique est une tension qui varie et qui possède une infinité d'états
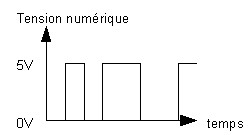
- Une tension numérique est une tension qui ne possède que deux états, ces deux états représentés 0 et 1, bien souvent, on choisi de représenter l'état 0 par 0V et 1 par 5V
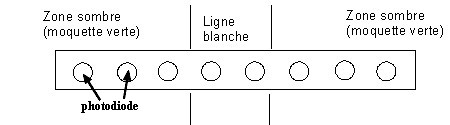
Pour capter notre ligne blanche, nous avons donc besoin d'un capteur, nous allons utiliser des photodiodes, celles-ci captent la lumière et la transforme en une tension analogique. Ainsi, lorsque la photodiode est au dessus de la zone sombre, elle renverra une faible tension analogique, et lorsque qu'elle sera au dessus de la ligne blanche, elle renverra une forte tension analogique.
 En réalité, la photodiode ne renvoie pas une tension mais se comporte comme un générateur de courant, cependant, nous étudierons un montage qui va permettre à partir de l'information de la photodiode de créer une variation de tension.
En réalité, la photodiode ne renvoie pas une tension mais se comporte comme un générateur de courant, cependant, nous étudierons un montage qui va permettre à partir de l'information de la photodiode de créer une variation de tension.
Cependant, si l'on veut pouvoir capter la position de la ligne nous allons avoir besoin de plusieurs photodiodes ! Si l'on suppose que notre ligne blanche fait 2 cm de largeur, nous devrons disposer plusieurs photodiodes en ligne sur une longueur d'au moins 8 cm pour que ce soit efficace, espacée l'une de l'autre de 1cm, ce qui nous fait 8 photodiodes nécessaire :
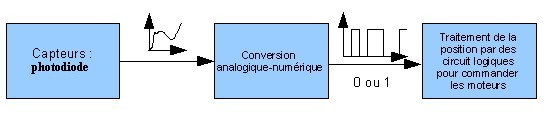
Bon nous avons notre tension analogique plus ou moins faible selon la position de notre photodiode sur le sombre ou sur le blanc, comment va-t-on l'exploiter ? Il faut savoir que les calculateurs en amont de ce système travailleront plutôt avec des tensions numériques, tout les circuits logiques ou microcontrôlleurs travaillent avec des tensions numériques. Il va falloir alors convertir notre tension analogique en tension numérique ! C'est là que la vraie électronique entre en jeu !
Pour récapituler le fonctionnement de notre système voici un schéma :
Je voudrais enfin souligner que nous possédons 8 photodiodes donc après la conversion analogique-numérique nous aurons 8 fois 0 ou 1 puisque chaque photodiode enverra une information qui pour chacun sera convertie en numérique. Notre système renverra donc un mot de 8 bits (8 chiffres valant 0 ou 1).
On considère que la valeur 1 du numérique signifie : est sur la ligne, et que la valeur 0 signifie : n'est pas sur la ligne.
Ainsi si notre système renvoi :
- 01100000 : c'est que la ligne se situe sur la gauche du robot. Le robot devra donc tourner vers la gauche pour recentrer la ligne au milieu du robot.
- 00000011 : c'est que la ligne se situe sur la droite du robot, il faut qu'il tourne donc à droite !
- 00011000 : la ligne est sur le milieu du robot, c'est parfait ! Fonce tout droit !
- 00000000 : oh oh, on est perdu la ^^ on voit plus la ligne, mais où sommes nous ?
Entrons dans le vif du sujet ! A nous l'électronique !
Maintenant que tout le monde à compris le principe du système, on va pouvoir attaquer la partie électronique du système !
Theorie
Étudions maintenant les schémas électrique du système de positionnement !
Tout d'abord nous allons nous intéresser aux photodiodes et les composants qui vont l'entourer. Une photodiode peut être considéré comme un générateur de courant quasiment idéal. Ce courant varie en fonction de la lumière captée par la photodiode. Voici la courbe d'une photodiode :
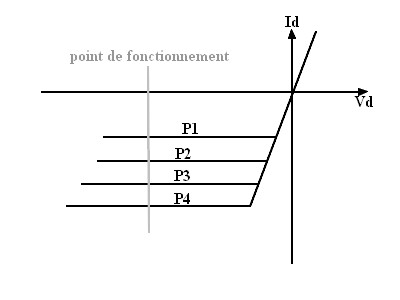
Pour un point de fonctionnement fixé avec une valeur donnée Vd (tension aux bornes de la photodiode), la photodiode fournie un courant qui varie en fonction de la puissance lumineuse (P1, P2, P3, P4). Cependant, ce courant est très faible. Il va donc falloir qu'on l'amplifie pour pouvoir l'exploiter puis qu'on le fasse traverser une résistance pour avoir une variation de tension plutôt qu'une variation de courant.
 Comment allons nous faire pour amplifier le courant de la photodiode ?
Comment allons nous faire pour amplifier le courant de la photodiode ?
Nous allons utiliser un amplificateur opérationnel !
Voici le montage utilisé pour une photodiode :
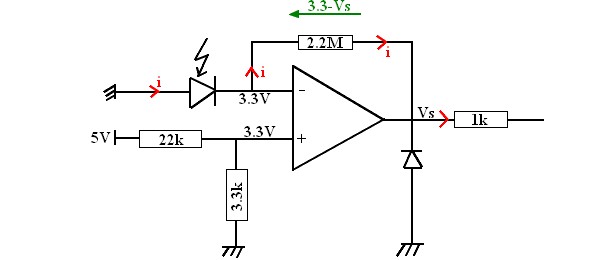
Calculons maintenant Vs pour voir si ce schéma correspond bien à nos attentes. L'amplificateur opérationnel fait que V+ = V-, on peut calculer facilement V+ à l'aide du diviseur de tension : . Le courant qui passe dans la photodiode est égale à celui qui passe dans la résistance de 2.2M. On a donc
. Le courant qui passe dans la photodiode est égale à celui qui passe dans la résistance de 2.2M. On a donc  avec
avec  (loi d'ohm). Ce qui nous donne donc
(loi d'ohm). Ce qui nous donne donc  avec
avec  le courant qui passe dans la photodiode. Comme nous le montre la courbe d'une photodiode, le courant est négatif lorsque qu'elle fonctionne en inverse. Ce circuit électrique est donc correcte et fourni une tension qui va monter lorsque la puissance lumineuse sera plus importante. En bonus, voici une petite étude graphique de notre tension de sortie :
le courant qui passe dans la photodiode. Comme nous le montre la courbe d'une photodiode, le courant est négatif lorsque qu'elle fonctionne en inverse. Ce circuit électrique est donc correcte et fourni une tension qui va monter lorsque la puissance lumineuse sera plus importante. En bonus, voici une petite étude graphique de notre tension de sortie :
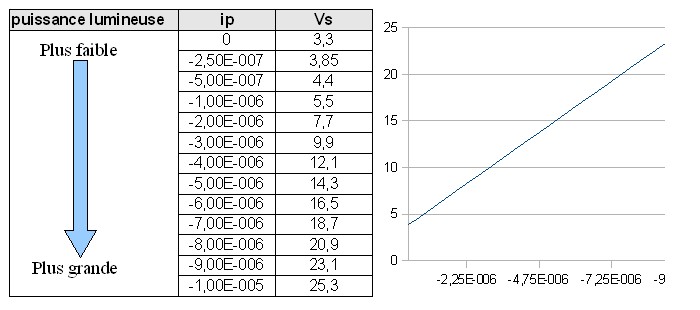
avec ip le courant dans la photodiode en ampère et en ordonnée et Vs la tension de sortie du montage en volt et en abscisse.
Maintenant que nous avons étudiez ce montage parfait qui s'occupe de rendre exploitable l'information de la photodiode, nous allons voir comment convertir cette tension analogique de sortie en tension numérique.
Et bien, pour ce problème, nous allons utiliser un comparateur ! Un comparateur est un circuit logique (non programmable) qui compare la tension de l'une de ses bornes avec une autre tension à l'autre de ses bornes, selon cette comparaison, un interrupteur interne s'ouvre ou se ferme. Appelons V+ et V- ces deux bornes.
Si V+ - V- >0 l'interrupteur est ouvert.
Si V+ - V- <0 l'interrupteur se ferme.
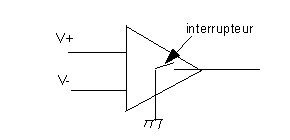
Vous ne vous en doutez peut être pas, mais toute la technique de notre système tourne autour de ce circuit, le LM339, qui en fait comporte 4 modules comme dessiné au dessus ( puisque qu'on à 8 photodiodes à convertir, il nous faudra donc deux LM339 en réalité).
On va appliquer notre tension analogique d'une photodiode sur la borne V+ , on va fixer V- à une certaine valeur qui sera un bon compromis entre le « la photodiode voit la ligne » et « la photodiode voit pas la ligne ». Mais vous allez peut être mieux comprendre avec ce graphique qui représente la tension analogique que nous donne une photodiode en fonction de la lumière captée :
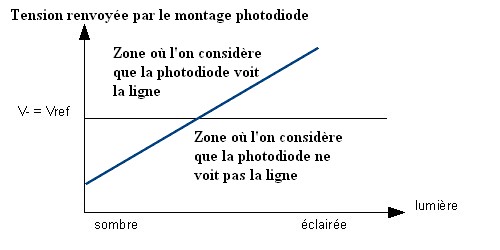
Si on applique notre modèle, lorsque la tension analogique de la photodiode sera au dessus de Vref ( Vref est la même tension que V-, c'est juste que j'ai décidé de lui changer son nom car c'est une tension de référence qui permet de définir la limite entre nos deux zones) l'interrupteur de notre comparateur sera ouvert, en dessous de Vref, l'interrupteur sera fermé.
Peut être l'avez vous déjà présentit, mais nous nous rapprochons de ce que nous désirons, un interrupteur qui peut être soit ouvert, soit fermé selon la tension de la photodiode ne représenterait-il pas deux état et seulement deux : ouvert ou fermé ?
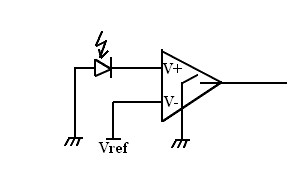
Pour la suite de ce chapitre, afin d'alléger les schémas, nous considèrerons que tout le système vu précédamment pour capter la lumière sera représenté par une simple photodiode.
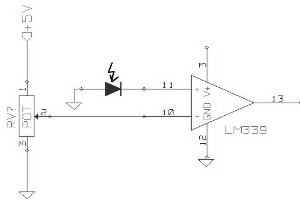
Nous pouvons déjà compléter un peu notre schéma électrique :
On va maintenant régler le cas du Vref, en effet, comme les calculs c'est un peu chiant, on va pas calculer un Vref idéal à l'aide des doc technique et des caractéristique de la photodiode, on va plutôt créer un petit système tout simple qui permet de modifier la valeur de Vref sur le terrain à l'aide d'un potentiomètre, comprenez là une résistance variable dont on peut modifier la valeur grâce à nos mains ! Qui dit résistance variable dit tension qu'on va pouvoir faire varier ! On aura plus qu'à la fixer sur le terrain, vous verrez on y reviendra et c'est un jeu d'enfant.
Voici le mini montage qui va nous permettre de tordre le coup au Vref :

Avec ceci Vref vaudra une valeur entre 0 et 5V selon comment on aura fixer la valeur du potentiomètre.
Allez on met tout ça bout à bout !
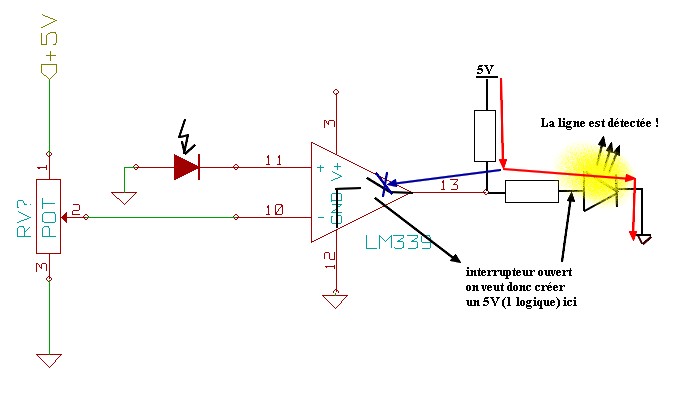
Bon maintenant, et si on s'occupait de cette sortie qui devra être égale à 5V (1) ou 0V (0) ! Et bien on va mettre une résistance dite de « pull up ». N'oublions pas le fait que quand on doit avoir 1 , l'interrupteur est ouvert et lorsque l'on doit avoir 0 l'interrupteur est fermé. On va également y rajouter les petite loupiote (LED) qui nous permettront de voir où est ce que la ligne est détectée. Vous allez comprendre avec ces schémas :
Voici ce qui se passe sur une zone claire, sur la ligne blanche :
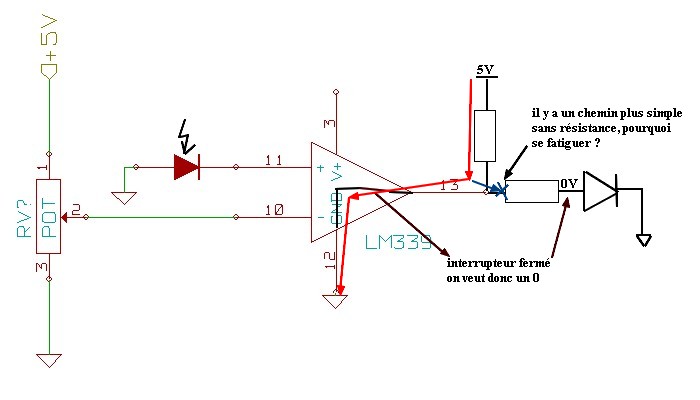
Voici ce qui se passe sur une zone d'ombre :
Assemblons toutes ces briques pour créer un schéma final :
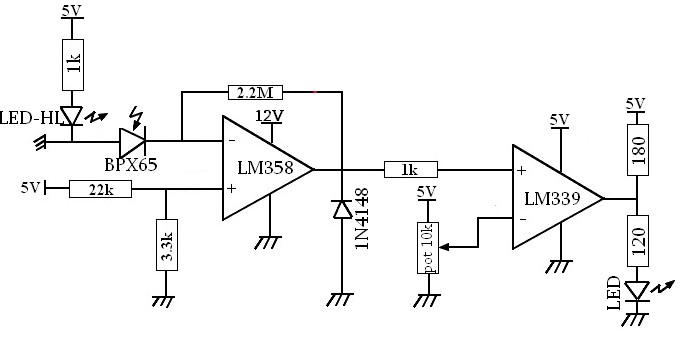
J'en ai profité pour rajouter une DEL haute luminausité pour que la lumière soit bien réfléchie sur la ligne blanche. Celle-ci doit donc se trouver physiquement très prêt de la photodiode.De plus j'ai calculé les résistances adéquates en sortie du LM339 (sachant qu'on veut 20mA dans la LED).
Ces schémas représentent ce qui se passe pour une seul photodiode, pour avoir le schéma complet il faut donc mettre 8 fois ce schéma les uns à côté des autres.
Maintenant nous possèdons tout les schémas électriques nécessaires à la conception du système !
Alors à 1, 2, 3 partez !!!
Pratique
Dans cette partie vous pourrez suivre pas à pas la réalisation de la carte capteur de votre futur robot !
A venir prochainement, en attendant, voici une petite mise en garde :
Ne vous lancez pas dans la réalisation de ce système si vous voulez qu'il fonctionne du premier coup, la partie théorique explique les grandes lignes du système mais fait l'impasse sur certains détails qui ne sont pas forcément interessant.
Et bien pour conclure, vous obtenez un beau système détecteur de ligne, il ne reste plus qu'à traiter tout l'amont de ce système, comprenez par là, pourquoi pas un microcontrôleur qui s'occupera de ce mot de 8 bits (00110000) pour dire aux moteurs ( celui de gauche et celui de droite) d'accélérer, de décélérer à l'aide d'un pont en H qui contrôlerait la vitesse de ces moteurs !
J'espère que ce tutoriel vous aura plu et je vous dis à bientôt pour de nouvelles aventures !
Retrouvez sur le montage d'un robot suiveur de ligne.
N'avez vous jamais rêvé de créer un robot qui se dirige tout seul selon le marquage au sol ? Je vais vous présenter un système qui pourra alors certainement ajouter une brique nécessaire à votre rêve.
Ce système est adapté pour capter le positionnement d'une ligne blanche sur un fond sombre. Cependant, il ne présente que l'aspect capteur du robot, ce tutoriel ne vous permettra pas à lui seul de construire ce robot suiveur de ligne blanche. Il ne nécessite pas énormément de matériel. Je vous propose maintenant d'en comprendre le principe global et de le concevoir.
Principe
Nous allons tout d'abord nous pencher sur le principe de ce système, comprendre comment il fonctionne.
Tout d'abord, je souhaite éclaircir un point simple mais important:
- Une tension analogique est une tension qui varie et qui possède une infinité d'états
- Une tension numérique est une tension qui ne possède que deux états, ces deux états représentés 0 et 1, bien souvent, on choisi de représenter l'état 0 par 0V et 1 par 5V
Pour capter notre ligne blanche, nous avons donc besoin d'un capteur, nous allons utiliser des photodiodes, celles-ci captent la lumière et la transforme en une tension analogique. Ainsi, lorsque la photodiode est au dessus de la zone sombre, elle renverra une faible tension analogique, et lorsque qu'elle sera au dessus de la ligne blanche, elle renverra une forte tension analogique.
En réalité, la photodiode ne renvoie pas une tension mais se comporte comme un générateur de courant, cependant, nous étudierons un montage qui va permettre à partir de l'information de la photodiode de créer une variation de tension.Cependant, si l'on veut pouvoir capter la position de la ligne nous allons avoir besoin de plusieurs photodiodes ! Si l'on suppose que notre ligne blanche fait 2 cm de largeur, nous devrons disposer plusieurs photodiodes en ligne sur une longueur d'au moins 8 cm pour que ce soit efficace, espacée l'une de l'autre de 1cm, ce qui nous fait 8 photodiodes nécessaire :
Bon nous avons notre tension analogique plus ou moins faible selon la position de notre photodiode sur le sombre ou sur le blanc, comment va-t-on l'exploiter ? Il faut savoir que les calculateurs en amont de ce système travailleront plutôt avec des tensions numériques, tout les circuits logiques ou microcontrôlleurs travaillent avec des tensions numériques. Il va falloir alors convertir notre tension analogique en tension numérique ! C'est là que la vraie électronique entre en jeu !
Pour récapituler le fonctionnement de notre système voici un schéma :
Je voudrais enfin souligner que nous possédons 8 photodiodes donc après la conversion analogique-numérique nous aurons 8 fois 0 ou 1 puisque chaque photodiode enverra une information qui pour chacun sera convertie en numérique. Notre système renverra donc un mot de 8 bits (8 chiffres valant 0 ou 1).
On considère que la valeur 1 du numérique signifie : est sur la ligne, et que la valeur 0 signifie : n'est pas sur la ligne.
Ainsi si notre système renvoi :
- 01100000 : c'est que la ligne se situe sur la gauche du robot. Le robot devra donc tourner vers la gauche pour recentrer la ligne au milieu du robot.
- 00000011 : c'est que la ligne se situe sur la droite du robot, il faut qu'il tourne donc à droite !
- 00011000 : la ligne est sur le milieu du robot, c'est parfait ! Fonce tout droit !
- 00000000 : oh oh, on est perdu la ^^ on voit plus la ligne, mais où sommes nous ?
Entrons dans le vif du sujet ! A nous l'électronique !
Maintenant que tout le monde à compris le principe du système, on va pouvoir attaquer la partie électronique du système !
Theorie
Étudions maintenant les schémas électrique du système de positionnement !
Tout d'abord nous allons nous intéresser aux photodiodes et les composants qui vont l'entourer. Une photodiode peut être considéré comme un générateur de courant quasiment idéal. Ce courant varie en fonction de la lumière captée par la photodiode. Voici la courbe d'une photodiode :
Pour un point de fonctionnement fixé avec une valeur donnée Vd (tension aux bornes de la photodiode), la photodiode fournie un courant qui varie en fonction de la puissance lumineuse (P1, P2, P3, P4). Cependant, ce courant est très faible. Il va donc falloir qu'on l'amplifie pour pouvoir l'exploiter puis qu'on le fasse traverser une résistance pour avoir une variation de tension plutôt qu'une variation de courant.
Comment allons nous faire pour amplifier le courant de la photodiode ?Nous allons utiliser un amplificateur opérationnel !
Voici le montage utilisé pour une photodiode :
Calculons maintenant Vs pour voir si ce schéma correspond bien à nos attentes. L'amplificateur opérationnel fait que V+ = V-, on peut calculer facilement V+ à l'aide du diviseur de tension :
. Le courant qui passe dans la photodiode est égale à celui qui passe dans la résistance de 2.2M. On a donc avec (loi d'ohm). Ce qui nous donne donc avec le courant qui passe dans la photodiode. Comme nous le montre la courbe d'une photodiode, le courant est négatif lorsque qu'elle fonctionne en inverse. Ce circuit électrique est donc correcte et fourni une tension qui va monter lorsque la puissance lumineuse sera plus importante. En bonus, voici une petite étude graphique de notre tension de sortie :avec ip le courant dans la photodiode en ampère et en ordonnée et Vs la tension de sortie du montage en volt et en abscisse.
Maintenant que nous avons étudiez ce montage parfait qui s'occupe de rendre exploitable l'information de la photodiode, nous allons voir comment convertir cette tension analogique de sortie en tension numérique.
Et bien, pour ce problème, nous allons utiliser un comparateur ! Un comparateur est un circuit logique (non programmable) qui compare la tension de l'une de ses bornes avec une autre tension à l'autre de ses bornes, selon cette comparaison, un interrupteur interne s'ouvre ou se ferme. Appelons V+ et V- ces deux bornes.
Si V+ - V- >0 l'interrupteur est ouvert.
Si V+ - V- <0 l'interrupteur se ferme.
Vous ne vous en doutez peut être pas, mais toute la technique de notre système tourne autour de ce circuit, le LM339, qui en fait comporte 4 modules comme dessiné au dessus ( puisque qu'on à 8 photodiodes à convertir, il nous faudra donc deux LM339 en réalité).
On va appliquer notre tension analogique d'une photodiode sur la borne V+ , on va fixer V- à une certaine valeur qui sera un bon compromis entre le « la photodiode voit la ligne » et « la photodiode voit pas la ligne ». Mais vous allez peut être mieux comprendre avec ce graphique qui représente la tension analogique que nous donne une photodiode en fonction de la lumière captée :
Si on applique notre modèle, lorsque la tension analogique de la photodiode sera au dessus de Vref ( Vref est la même tension que V-, c'est juste que j'ai décidé de lui changer son nom car c'est une tension de référence qui permet de définir la limite entre nos deux zones) l'interrupteur de notre comparateur sera ouvert, en dessous de Vref, l'interrupteur sera fermé.
Peut être l'avez vous déjà présentit, mais nous nous rapprochons de ce que nous désirons, un interrupteur qui peut être soit ouvert, soit fermé selon la tension de la photodiode ne représenterait-il pas deux état et seulement deux : ouvert ou fermé ?
Pour la suite de ce chapitre, afin d'alléger les schémas, nous considèrerons que tout le système vu précédamment pour capter la lumière sera représenté par une simple photodiode.
Nous pouvons déjà compléter un peu notre schéma électrique :
On va maintenant régler le cas du Vref, en effet, comme les calculs c'est un peu chiant, on va pas calculer un Vref idéal à l'aide des doc technique et des caractéristique de la photodiode, on va plutôt créer un petit système tout simple qui permet de modifier la valeur de Vref sur le terrain à l'aide d'un potentiomètre, comprenez là une résistance variable dont on peut modifier la valeur grâce à nos mains ! Qui dit résistance variable dit tension qu'on va pouvoir faire varier ! On aura plus qu'à la fixer sur le terrain, vous verrez on y reviendra et c'est un jeu d'enfant.
Voici le mini montage qui va nous permettre de tordre le coup au Vref :
Avec ceci Vref vaudra une valeur entre 0 et 5V selon comment on aura fixer la valeur du potentiomètre.
Allez on met tout ça bout à bout !
Bon maintenant, et si on s'occupait de cette sortie qui devra être égale à 5V (1) ou 0V (0) ! Et bien on va mettre une résistance dite de « pull up ». N'oublions pas le fait que quand on doit avoir 1 , l'interrupteur est ouvert et lorsque l'on doit avoir 0 l'interrupteur est fermé. On va également y rajouter les petite loupiote (LED) qui nous permettront de voir où est ce que la ligne est détectée. Vous allez comprendre avec ces schémas :
Voici ce qui se passe sur une zone claire, sur la ligne blanche :
Voici ce qui se passe sur une zone d'ombre :
Assemblons toutes ces briques pour créer un schéma final :
J'en ai profité pour rajouter une DEL haute luminausité pour que la lumière soit bien réfléchie sur la ligne blanche. Celle-ci doit donc se trouver physiquement très prêt de la photodiode.De plus j'ai calculé les résistances adéquates en sortie du LM339 (sachant qu'on veut 20mA dans la LED).
Ces schémas représentent ce qui se passe pour une seul photodiode, pour avoir le schéma complet il faut donc mettre 8 fois ce schéma les uns à côté des autres.
Maintenant nous possèdons tout les schémas électriques nécessaires à la conception du système !
Alors à 1, 2, 3 partez !!!
Pratique
Dans cette partie vous pourrez suivre pas à pas la réalisation de la carte capteur de votre futur robot !
A venir prochainement, en attendant, voici une petite mise en garde :
Ne vous lancez pas dans la réalisation de ce système si vous voulez qu'il fonctionne du premier coup, la partie théorique explique les grandes lignes du système mais fait l'impasse sur certains détails qui ne sont pas forcément interessant.Et bien pour conclure, vous obtenez un beau système détecteur de ligne, il ne reste plus qu'à traiter tout l'amont de ce système, comprenez par là, pourquoi pas un microcontrôleur qui s'occupera de ce mot de 8 bits (00110000) pour dire aux moteurs ( celui de gauche et celui de droite) d'accélérer, de décélérer à l'aide d'un pont en H qui contrôlerait la vitesse de ces moteurs !
J'espère que ce tutoriel vous aura plu et je vous dis à bientôt pour de nouvelles aventures !
Retrouvez sur le montage d'un robot suiveur de ligne.









